自动车环境下交叉口无信号混合控制策略研究
2023-01-18李卓姌鲁工圆
李卓姌,李 嘉,鲁工圆
(西南交通大学交通运输与物流学院,成都 611756)
在城市交通系统中,交叉口存在诸多效率、安全、污染等方面的问题.随着自动车技术的兴起,车联网为交叉口控制提供了新的发展契机.车联网环境能够提供海量、连续、关联的车辆移动轨迹数据[1-2].近年来,有许多基于车路协同技术的交叉口信号优化控制研究[3-6].但信号控制通常会造成车辆不必要的减速和停车,并未充分利用交叉口通行能力.
为提高交叉口的通行效率,Dresner等[7]提出一种自动车环境下基于预约的交叉口无信号控制策略.车辆向交叉口管理器(Intersection Manager,IM)发送预约请求,IM根据冲突协调策略指导车辆通过冲突区.基于预约的先到先得(First Come First Serve,FCFS)控制策略[7]是一种应用广泛的冲突协调策略,IM根据车辆发送预约请求的顺序确定车辆通过交叉口的顺序.为提高预约效率,Jin等[8]提出一种基于车队的FCFS控制策略,其中车辆通过车车通信形成车队并向IM发送整个车队的冲突区占用时间.虽然FCFS策略既能提高交叉口的通行效率又能保证车辆通行顺序的公平性[9],但Levin等[10]提出在车流量大且主路和支路车流量不对称的场景下,FCFS策略比信号配时策略产生更高延误的悖论.原因在于传统信号控制会给车道数多且车流量大的主路分配更多的通行时间,使主路车辆能连续通过,而FCFS策略中主路和支路车辆会产生频繁的通行权交换.Yu等[11]证明了FCFS策略不适用于交通需求大且存在大量冲突车流量的场景.
除FCFS冲突协调策略外,还有基于优化的冲突协调策略和启发式冲突协调策略.基于优化的策略试图通过优化算法最小化整个交叉口的平均行程时间,而不考虑车辆的进入顺序[12].Fayazi等[13]提出一种基于混合整数线性规划的冲突协调算法.Zhu等[14]采用线性规划对车辆进行冲突协调控制.还有一些以乘客舒适度[15-17]、最小化燃油消耗[13,17-18]、最小化加减速度变化量[19]为优化目标的冲突协调策略.基于优化的控制策略虽能建立多目标优化模型,寻找全局最优解,但会受计算复杂性的限制[20].
启发式冲突协调策略采用启发式算法调整车辆通行顺序,虽只能得到局部最优解,但可有效实现优化目标.Tachet等[21]提出一种基于车队的启发式协调控制策略,该策略具有指定的重新排序周期.当IM收到请求时,不会立即为车辆分配速度,而是收集所有车辆预约请求并等待指定周期结束,一旦周期结束,它会重新调整车辆通过冲突区顺序以获得最有效的通行模式.Choi等[22]提出创建冲突树的方法,以找到最早的可预约时间段.
以上研究主要聚焦于对称交叉口,忽略了主路和支路车辆优先级的差异性.Lukose等[23]提出将信号优化配时的方法融入到基于预约的交叉口无信号控制策略中,按照最佳绿信时长对各方向车辆延误进行加权,从而分配主路与支路车辆的通行权,解决Levin等[10]提出的悖论.该策略虽能基于交通流量比,区分主路和支路车辆的优先级,但是并未考虑实时的车流量状况.此外,该策略缺乏安全缓冲机制[24]来避免通信延误和传感器噪音可能造成的安全隐患.
综上,现有自动车环境下交叉口无信号控制策略研究缺乏对主路和支路车辆通行优先级和安全缓冲机制的考量.车辆的预约、通行顺序不能根据实时车流量状况更新.为此,本文提出一种混合控制策略,IM首先基于FCFS策略对车辆的预约请求进行预处理,并在一定的重新排序周期内检测预约冲突的冲突车辆组.启发式冲突协调算法按延误最低的通行方式调整冲突车辆组中车辆的通行顺序.该策略的主要贡献有:引入了启发式冲突协调算法,以最小延误为目标,优化车辆通行顺序,基于车道车流量区分车辆的优先级,使车流量大方向车辆能组成车队连续通行,解决了FCFS策略在车流量大且主路和支路车流量不对称场景下效率低于信号配时策略的悖论;引入取消预约机制,根据实时车流量状况更新车辆预约;设置安全缓冲区,提高策略的安全性和无信号交叉口控制系统的故障容许度.
1 场景描述
文献[10]提出的悖论场景交叉口如图1所示,为一个东西向单车道,南北向三车道的无信号交叉口.车辆进入图1中蓝色控制区域,则向IM发送预约请求.假设:所有车辆均为自动车且具备车路通信能力;所有车辆以相同的限速度进入交叉口通信范围;进入交叉口通信范围内的车辆按特定轨迹行驶,不允许出现车辆换道或乘客中途下车等现象;车辆收到IM发送的加减速指令后立刻响应,无反应时间.

图1 交叉口示意图Fig.1 Schematic diagram of intersection
为确保控制策略的安全性,使车辆以限速通过冲突区,提高交叉口通行效率,将交叉口控制区划分为安全减速区、核心控制区和冲突区.
安全减速区用于冲突车辆组检测,车辆只能在该区域中减速,驶出该区域的车辆接近冲突区,不能再加入冲突车辆组中减速延后通行权,否则无法保证车辆以限速通过冲突区.安全减速区的长度LS需满足所有车辆能在该区域内减速至静止,即

式中:Dl为车辆以限速vl,最小加速度amin减速至静止行驶的距离;Tmax为IM的最大重新排序周期时长;δT为在IM开始处理车辆请求的反应时间内,已进入路网车辆行驶的最长距离.
核心控制区保证了在安全减速区中减速的车辆能重新加速至限速通过冲突区.其长度需满足减速至静止的车辆仍能在该区域内加速至限速,即

冲突区是车流交汇处,存在多个冲突点,极易发生车辆碰撞.文献[7]将冲突区域划分为多个网格,以提高冲突区的利用率,但文献[25]证明了冲突区网格化会增加计算复杂性.此外,在FCFS策略中车辆通行顺序是固定的,但混合控制策略会改变车辆的通行顺序.若将交叉口网格化,同车道的连续车辆需要对多个网格进行预约时,针对不同网格,车辆最优通行方式可能不同,即连续车辆可能在预约不同网格时分别被要求连续或分开通过.为避免产生矛盾,降低计算复杂性,本文将冲突区作为一个整体进行预约.
2 混合控制策略
2.1 预约流程
车辆预约具体流程如图2所示,包含车辆向IM发送预约请求和IM处理预约请求两部分.
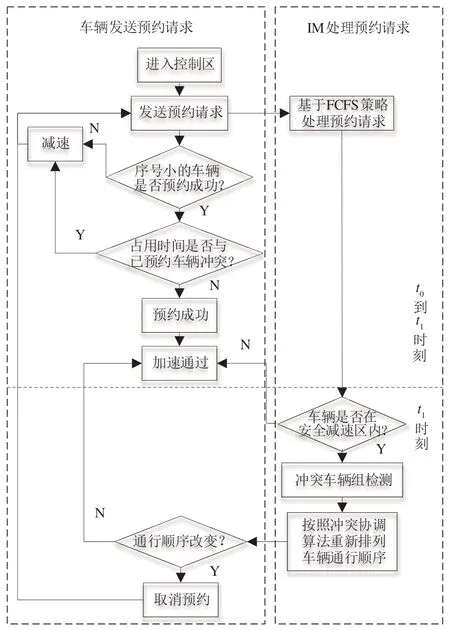
图2 预约流程Fig.2 Reservation flowchart
车辆以限速进入交叉口,并向IM发送冲突区预约请求.车辆询问IM比其序号小的车辆是否已预约成功,若成功,则继续询问自身的占用时间是否与已预约车辆冲突,若未冲突,IM接受车辆的预约请求,车辆预约成功;否则,IM拒绝预约请求,车辆减速并持续向IM发送预约请求,直至IM接受请求,车辆重新加速至限速匀速通过交叉口.
IM在t0至t1时刻内收集车辆的请求,并按FCFS策略对车辆的预约请求进行预处理.在t1时刻,IM检测在安全减速区内的冲突车辆组,根据冲突协调算法按延误最低的策略优化车辆的通行顺序,并将排序结果发送给车辆.通行顺序改变的车辆需重新发送预约请求,未改变的车辆按原有预约通过交叉口.
2.2 冲突规则
对于车辆Vi,设其占用冲突区的时间为[tin,Vi,tout,Vi].车 辆 从 当 前 所 在 位 置 到 通 过 冲 突 区 的行驶模式有匀速和先加速后匀速两种.
1)若车辆Vi从当前所在位置以限速vl匀速通过冲突区C,则

式 中:dVi,C为Vi与 冲 突 区C进 口 处 的 距 离;LC为 冲突区长度;LVi为车辆长度.
2)若车辆Vi从当前所在位置先匀加速至限速vl,随后保持vl匀速通过冲突区C,则

式 中:vi为 车 辆Vi当 前 的 速 度;ai为 车 辆Vi当 前 的加速度.
车辆Vi占用冲突区C的时间为

冲突区C的占用时间T被存储在交叉口IM内,表示为

车辆进入路网后,向IM发送自身的TVi,C,IM根据存储的T判断该车辆是否与其他车辆冲突.两辆车Vi、Vj的相对位置有3种情形,其发生冲突的情形为3种.
1)若车辆Vi、Vj来自不同方向,两车同时占用冲突区则冲突,即

2)若车辆Vi、Vj来自同一车道方向,则两车可连续进入冲突区,但两车追尾则冲突,即

3)若车辆Vi、Vj来自同方向不同车道则不冲突.
2.3 冲突车辆组检测
冲突车辆组为一段时间间隔内预约请求冲突的车辆集合.假设在t0至t1时刻之间,有n辆车向IM发送了预约请求,则IM在t1时刻检测到的冲突车辆组可用Gt1表示,即

IM首先检测最早发送预约请求的车辆Vi的冲突区占用时间TVi,C,按式(11)寻找与Vi冲突的所有车辆,并加入冲突车辆组Gt1中,再寻找与已加入Gt1中车辆冲突的其他车辆,继续加入Gt1中,直至Gt1不再变化,完成一个冲突车辆组检测.只有在安全减速区中的车辆才能加入冲突车辆组中,且每辆车只能被加入一个冲突车辆组.冲突车辆组的大小由t0与t1之间的时间间隔长度决定.冲突车辆组检测具体步骤共4步.
步骤1:IM首先判断n辆车中,最早发送预约请求的车辆Vi是否在安全减速区内.是则执行步骤2~步骤4;否则从Vi的后一辆车开始执行步骤1.
步骤2:对于Vi之后发送预约请求的车辆Vj,若Vj与Vi冲突,则将Vj加入冲突车辆组Gt1,令j=j+1,继续判断下一辆车Vj是否与Vi冲突,直至j>n,即已检测完所有与Vi冲突的车辆.
步骤3:若此时冲突车辆组为空(即n辆车中没有与Vi冲突的车辆),或冲突车辆组不为空,但下一辆车Vi+1的序列小于冲突车辆组中的最大序列(即尚未完成对已经加入冲突车辆组中所有车辆的冲突车辆检测),则令i=i+1,返回步骤2,IM开始对下一辆已加入冲突车辆组的车辆Vi进行冲突车辆检测.
步骤4:重复步骤2~步骤3,直至i≥n,冲突车辆组Gt1检测完成.
2.4 冲突协调算法
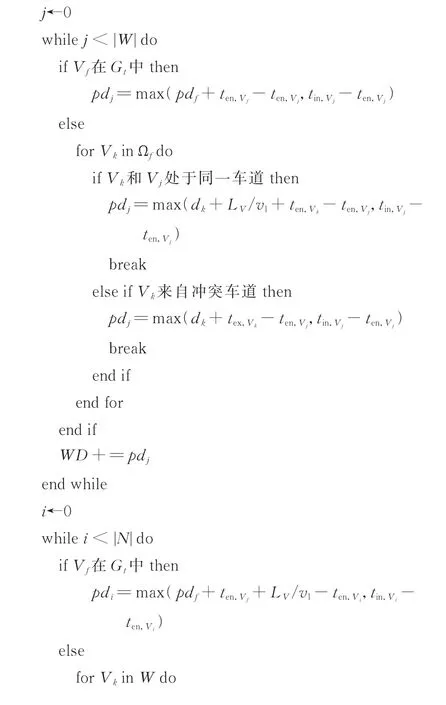
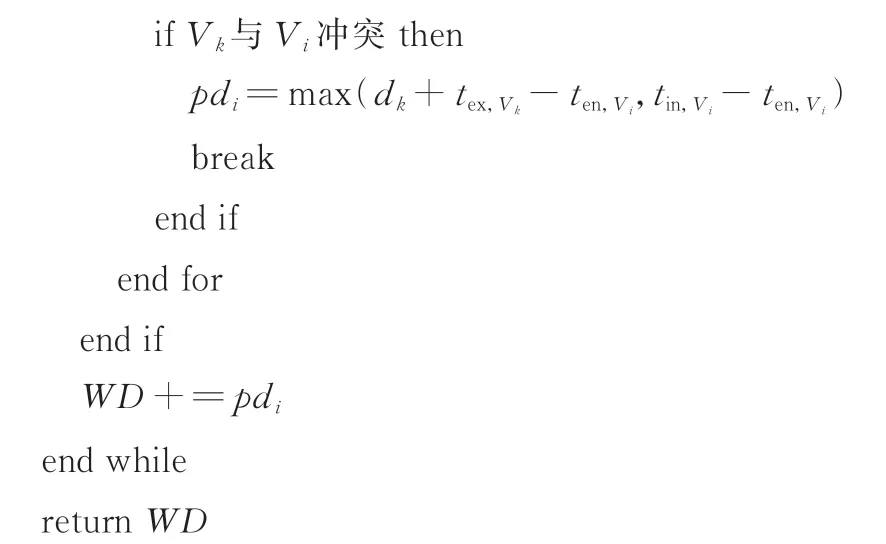
冲突协调算法用于优化冲突车辆组中车辆的通行顺序.算法1(fcfsDelay(Gt))计算冲突车辆组Gt中车辆按FCFS策略通行产生的延误.算法2(wPlatoonDelay(Gt))计算按西向来车组成车队先通过,北向来车再通过产生的延误.算法3按算法1、2计算Gt中车辆按FCFS策略、同向车辆组成车队连续通过的延误,根据延误最小的通行方式调整车辆通行顺序.
1)算法1.
对于车辆Vj,其按FCFS策略通过产生的延误(fdj),由前一辆与它冲突的车辆Vi产生.Vi和Vj可能处于同一车道或来自不同方向,发生冲突的条件如式(11)和式(12)所示.Ωf表示在Vj之前进入交叉口 且 尚 未 驶 出 冲 突 区 的 车 辆 集 合;ten,Vi和tex,Vi为Vi刚进入控制区域时发送的冲突区驶入、驶出时间;tin,Vj和tout,Vj为Vj驶入控制区域后发送的冲突区 驶入、驶出时间.


2)算法2.
假设冲突车辆组Gt中的车辆来自西向和北向.W和N分别表示西向、北向来车组成的集合.对于西向来车Vj,需判断与它同车道的前一辆车Vf是否也在Gt中.若Vf也在Gt中,则Vj按车队通过的延误pdj由Vf产生;否则,pdj由Ωf中具有dk延误的车辆Vk产生.对于北向来车Vi,同样需判断其前一辆车Vf是否在Gt中.若不在,pdi由W中与Vi冲突的车辆Vk产生.该冲突车辆组Gt的总延误为里面所有车辆延误之和.
3)算法3.
IM按 算 法1、2分 别 计 算 冲 突 车 辆 组Gt按FCFS、西向来车组成车队先通过、北向来车组成车队先通过三种通行方式产生的延误为d1、d2、d3,并按最小延误的通行方式,调整车辆通行顺序.在得到最优车辆通行顺序Gn后,IM把最新顺序发送给车辆,车辆依据新的顺序更新其实际延误.

3 仿真实验
为验证自动车环境下交叉口无信号混合控制策略的有效性,利用Anylogic软件进行仿真实验.实验首先研究文献[10]提出的悖论场景,然后分析重新排序周期时长对策略控制效果的影响,最后对比分析在不同车流量大小、安全缓冲区长度下FCFS策略和混合控制策略的效率.
3.1 仿真参数设置
仿真环境中,交叉口车道宽度为10 m,安全减速区和核心控制区的长度分别由式(1)、式(4)求得,冲突区的长度由车道数决定.车长5 m,宽2 m,限速vl为25 m/s,加速度为3 m/s2[7].实验中的平均延误由在仿真环境中1 000辆车通过冲突区求得.
3.2 结果分析
3.2.1 悖论场景研究
为验证混合控制策略较FCFS策略的高效性,首先搭建了文献[10]提出的悖论场景(图1):西向和北向各车道的车辆同时进入交叉口,且同车道前后车进入交叉口的时间间隔为1 s,共有16辆车进入交叉口.表1对比分析在FCFS策略和混合控制策略下,每辆车的初始通行顺序(即发送预约请求的顺序,其中初始通行顺序为4、8、12、16的为西向来车,其他为北向来车)、初始驶出时间(无冲突情况下驶出冲突区域的时间)、实际通行顺序、实际驶出时间以及产生的延误.图3比较了FCFS策略和混合控制策略产生的总延误.在仿真环境中,混合控制策略使车流量大的北向车辆先连续通过,再让西向车辆通过,这与文献[10]中所述的最优通行方式一致.混合控制策略产生的总延误为13.07 s,较FCFS策略产生的总延误29.6 s减少了约55.84%.
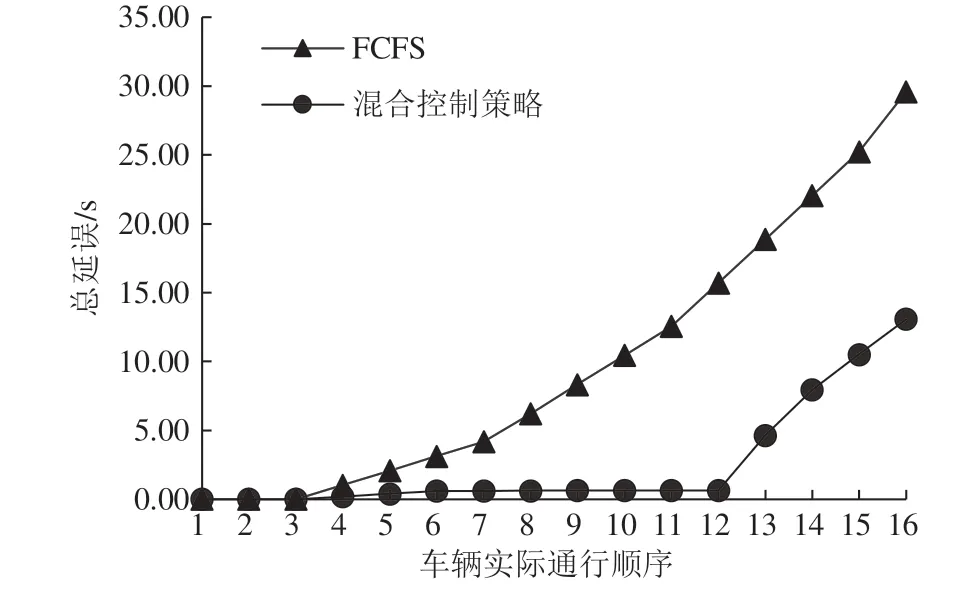
图3 悖论场景下FCFS策略和混合控制策略的总延误Fig.3 Total delay of FCFS policy and hybrid control method in paradox scenario
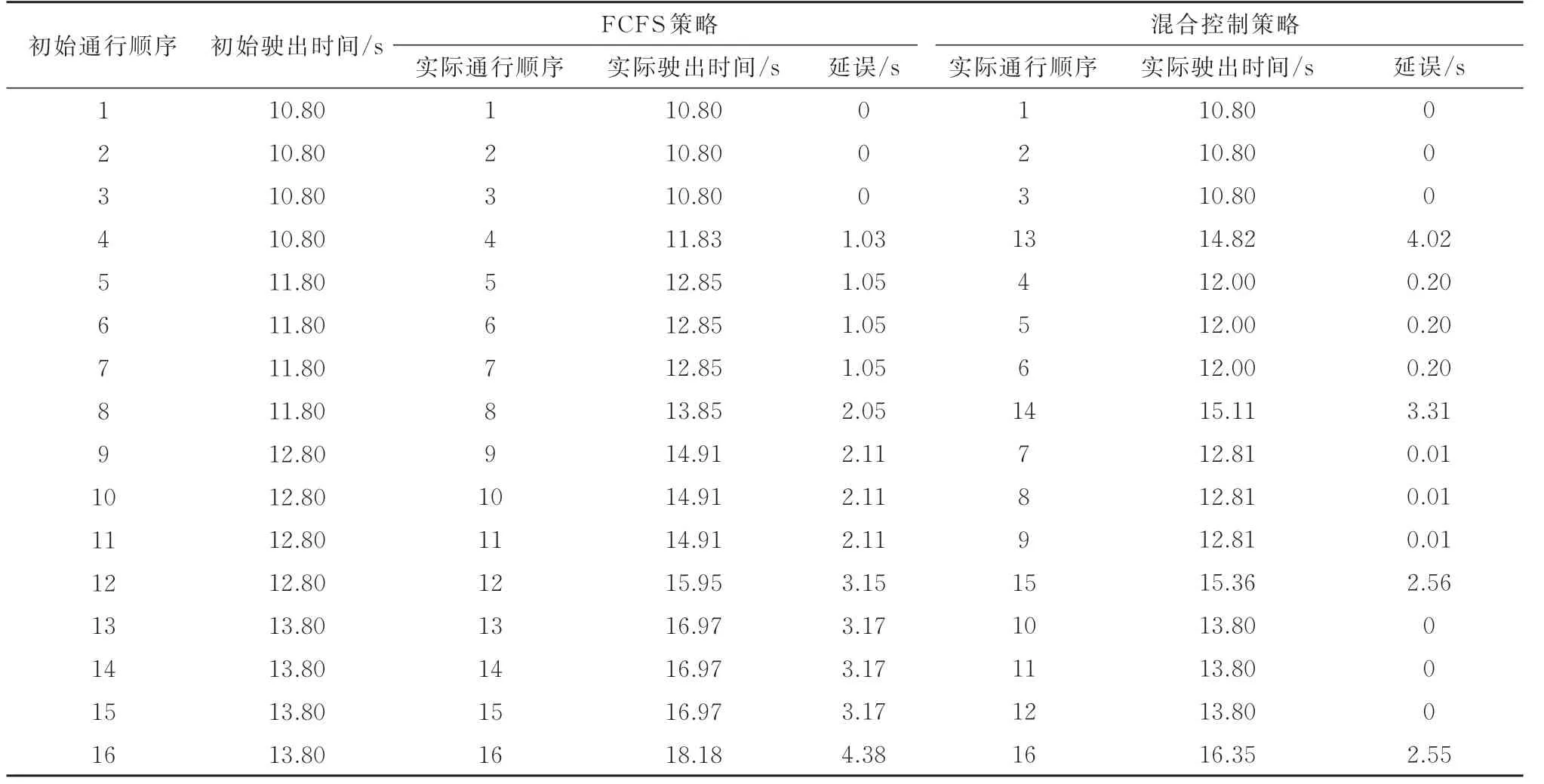
表1 悖论场景下FCFS策略和混合控制策略对比Tab.1 Comparison of FCFS policy and hybrid control method in paradox scenario
3.2.2 重新排序周期时长
为研究重新排序周期时长对混合控制策略控制效果的影响,对6个场景进行了仿真实验,包括5个重新排序周期由1 s增至5 s的基于混合控制策略的场景、1个基于FCFS策略的场景.每个场景分别研究了车流量为500 veh/(h·lane)、1 000 veh/(h·lane)、1 500 veh/(h·lane)和2 000 veh/(h·lane)时的平均延误.仿真结果表明,当车流量为2 000 veh/(h·lane)时,FCFS策略和混合控制策略均会出现排队溢出现象.当车流量为500 veh/(h·lane)、1 000 veh/(h·lane)和1 500 veh/(h·lane)时,仿真结果如图4所示.混合控制策略在不同的车流量和重新排序周期下控制效果都优于FCFS策略.当车流量为500 veh/(h·lane)和1 000 veh/(h·lane)时,重新排序周期对混合控制策略控制效果的影响不明显.但当车流量变得更加拥挤后(1 500 veh/(h·lane)),重新排序周期对混合控制策略的影响效果更加显著,在1 s的最佳重新排序周期场景下,平均延误为0.61 s,而在重新排序周期为5 s和FCFS策略场景下,平均延误分别为0.87 s和1.14 s,较最佳重新排序周期场景的平均延误增加了约42.62%和86.89%.
由图4可知,重新排序周期既不能过短,也不能过长.若周期时长过短,则IM没有接收到足够多的预约请求,导致冲突车辆组中的车辆较少,甚至为空,混合控制策略的控制效果将与FCFS策略接近.若重新排序周期过长,混合控制策略会出现2个问题.
1)当IM检测冲突车辆组时,会有大量车辆已驶出安全减速区.因此,冲突车辆组中的车辆仍会较少,混合控制策略的控制效果将与FCFS策略相似.
2)会给车辆造成不必要的减速,从而增加总延误.假设冲突车辆组为[W:{V1,V2};N:{V3}](W表示车辆为西向来车,N表示车辆为北向来车,下标数字代表车辆初始通行顺序).V3因与V1、V2冲突且通行顺序靠后而减速.当V3减速一段时间后,IM检测到冲突车辆组{V1,V2,V3},且发现该冲突车辆组的最优通行顺序为V3,V1,V2,则V1,V2需减速,在V3之后通过.即V3进入交叉口时不需要减速,减速反而使得V1,V2需降低到更小的速度才能在它之后通过,从而增加了总延误.
为让所提混合控制策略有更好的控制效果,需选择一个最优重新排序周期时长.根据实验结果,最终选取的重新排序周期时长为2 s.
3.2.3 两种策略在不同交通条件下的对比分析
为充分验证混合控制策略的有效性,比较了在不同车流量大小、安全缓冲区长度下FCFS策略和混合控制策略的延误.

图4不同重新排序周期时长下的平均延误Fig.4 Average delay under different reordering periods
图5为各车道车流量从500 veh/(h·lane)增长到2 000 veh/(h·lane)场景下两种策略的平均延误.竖线部分表示FCFS策略在车流量大于1 400 veh/(h·lane)时排队溢出,而混合控制策略的最大通行能力可达2 000 veh/(h·lane).平均延误随车流量增加,因为车流量增加会导致冲突车辆的数量增加,从而增加延误.图5中斜率随着流量增长,这与文献[7]结论一致.图6表示在相同车流条件下,混合控制策略较FCFS策略的平均延误减少率.由图6可知,车流量越大,混合控制策略较FCFS策略的优势更明显.
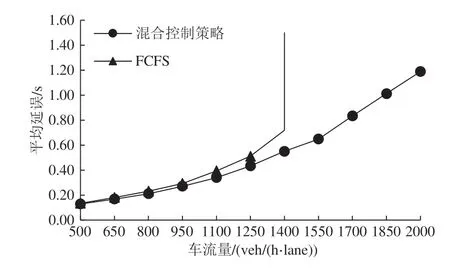
图5 不同流量下的平均延误Fig.5 Average delay under different traffic flows
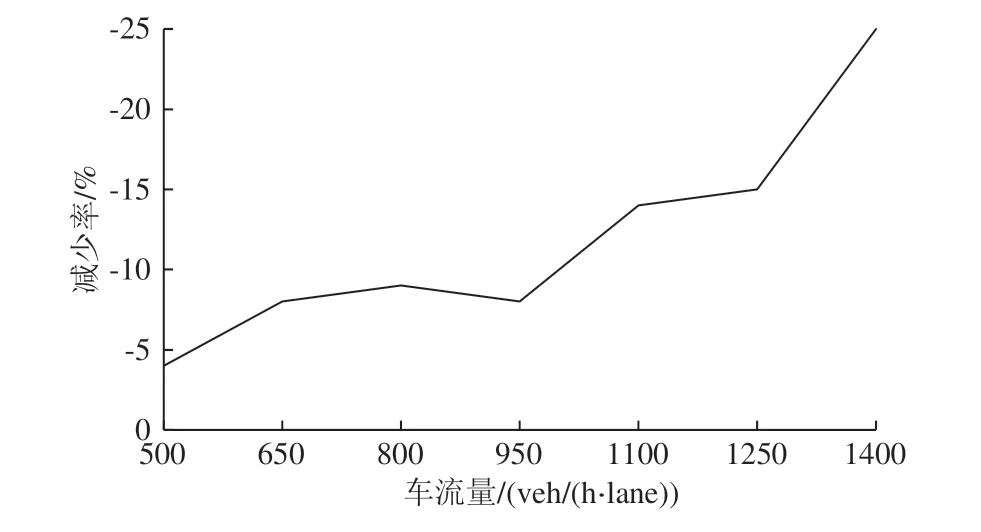
图6 混合控制策略较FCFS策略的平均延误减少率Fig.6 Average delay reduction rate of the hybrid control Method compared with FCFS policy
本文还比较了支路车流量固定,主路车流量逐渐增大场景下,FCFS策略和混合控制策略产生的延误.图7表示西向支路车流量固定为1 000 veh/(h·lane)、1 500 veh/(h·lane)场景下,北向主路车流量 从1 000 veh/(h·lane)增 加 到2 000 veh/(h·lane)时,FCFS策略和混合控制策略的平均延误.由图7(b)可知,当西向流量为1 500 veh/(h·lane),北向流量大于1 600 veh/(h·lane)时,FCFS策略出现排队溢出.此外,流量越大,主路较支路车流量差异越大,混合控制策略较FCFS策略的控制效果越好.当西向流量较小时(1 000 veh/(h·lane)),FCFS策略和混合控制策略产生的延误差异不大,FCFS策略甚至可能会比混合控制策略产生更低的延误,其原因可能为:假设有两个冲突车辆组[N:{V1,V2,V3};W:{V4}]和[N:{V5,V6,V7};W:{V8,V9}],第1个冲突车辆组的通行顺序为V1,V2,V3,V4.因在第1个冲突车辆组中,西向车V4最后通过.因此,可能第2个冲突车辆组中的西向车辆集合{V8,V9}跟随V4一起连续通过,会产生更低的延误.但若北向为车流量大的主路,则西向车先通过可能造成北向大量车辆减速,从而增加交叉口的总延误.混合控制策略的缺陷源于它的启发式特性,即它只能求得局部最优解,而不是全局最优.

图7 支路流量固定场景下产生的平均延误Fig.7 Average delay under fixed traffic flow at minor road
为避免通信延误和传感器噪音等因素造成的安全隐患,在控制策略中加入了安全缓冲区.图8为当各车道车流量为1 000 veh/(h·lane)时,安全缓冲区长度从0 s增加到0.5 s场景下FCFS策略和混合控制策略产生的平均延误.由图8可知,混合控制策略在不同安全缓冲区长度下产生的平均延误均小于FCFS策略.当安全缓冲区长度为0.5 s时,FCFS策略出现排队溢出,而在仿真环境中,混合控制策略在安全缓冲区长度为0.9 s时才会出现排队溢出,即混合控制策略能为车辆预留更长的安全减速区.
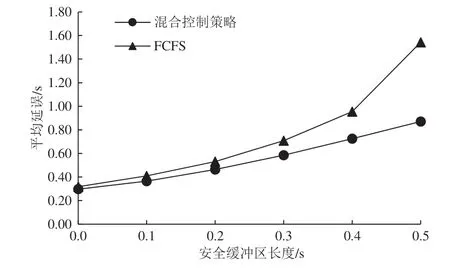
图8 车流量为1 000 veh/(h·lane)时的平均延误Fig.8 Average delay under a traffic flow of 1 000 veh/(h·lane)
4 结论
1)提出了一种自动车环境下交叉口无信号混合控制策略,解决了FCFS策略在车流量大且主路与支路车流量有较大差异场景下效率低于信号配时策略的悖论,提高了交叉口通行能力.仿真实验验证了在悖论场景下,混合控制策略较FCFS策略能减少55.84%的总延误.
2)分析了重新排序周期时长对混合控制策略控制效果产生的影响,并选取最优重新排序周期时长,研究不同车流量大小下FCFS策略和混合控制策略产生的延误.结果表明,混合控制策略较FCFS策略能减少延误并提高交叉口通行能力,尤其是在车流量大且主路较支路车流量差异大的场景下,混合控制策略的优势更显著.
3)对安全减速区的实验结果表明,混合控制策略能为车辆预留更长的安全减速区.
4)分析了所提混合控制策略由于其启发式性质存在的缺陷.未来可进一步将论文控制策略应用到更复杂的交通干线和交通路网中.
