三轴运动式KDP晶体生长驱动机构设计
2023-01-18吴艳芳
吴艳芳
(重庆三峡学院,重庆 404020)
KDP(磷酸二氢钾,KH2PO4)类晶体,在激光技术中的变频、光快速开关与电光调制等技术领域中被广泛应用[1]。目前,作为惯性约束核聚变工程(ICF)的首选材料,还没有性能更加优良的材料可以替代大尺寸的KDP。激光核聚变技术的快速发展,对KDP晶体的尺寸、光学质量和数量提出了越来越高的要求,同时也提高了制备KDP技术的要求[2]。溶液降温法,其基本原理是利用晶体物质较大的正溶解度温度系数,将在一定温度下配制的饱和溶液,在封闭的状态下保持溶剂总量不变,逐渐降低温度,使溶液成为过饱和溶液,析出的溶质不断结晶在籽晶上,是从溶液中培养KDP晶体的一种常用方法[3]。
使用溶液降温法制备KDP时,为了保证溶液温度均匀分布,使生长晶体的各晶面在过饱和溶液中能够得到均匀的溶质供应,要求晶体在溶液中不停地做相对运动。该相对运动一般采用转晶法(转动晶体)来实现,即在固定有籽晶的掣晶杆上接一台步进电机来实现其正反转。图1所示为一种典型的转晶式溶液降温法晶体生长装置[4]。

图1 转晶式溶液降温法晶体生长装置示意图
转晶式溶液降温法的晶体生长实验,结果发现其生长的晶体时常会出现各种不同程度的透明度差、裂纹等晶体缺陷[3]。
1 三轴运动式晶体生长驱动机构
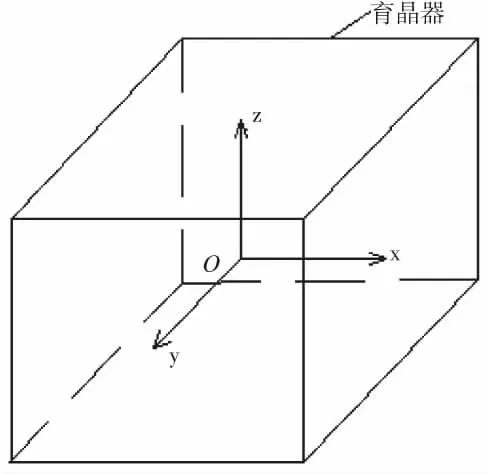
图2 晶体运动示意图
文章研究用一伺服电机驱动的运动轨迹、运动参数可变的三轴运动晶体生长驱动机构取代步进电机,带动掣晶杆做三轴直线运动。图2所示为晶体运动示意图,O为运动起始点,即籽晶的运动起始位置,这一位置可通过设计的控制软件随意更改和设置。晶体运动采用多周期循环运动的方式,即晶体生长驱动机构带动籽晶由O点开始,按照控制软件中设定的运动轨迹、速度、距离沿着±x、±y、±z六个方向进行直线运动并最终回到起点O,完成一个运动循环。一个运动循环结束,下一个运动循环立刻开始,直至所设定的运动循环次数即周期数全部完成,运动停止。
1.1 结构及硬件组成

图3 晶体生长驱动机构三维结构图
三轴运动式晶体生长驱动机构三维结构图如图3所示,其硬件组成如图4所示,主要包括运动执行部件、运动控制部件、运动辅助部件三部分。

图4 晶体生长驱动机构硬件组成框图
伺服电机因为其能够通过电机高精度编码器实时反馈位置数据,通过伺服驱动器实现闭环控制,因此,具有运行精度高、平稳、响应快速等优点,控制性能相较于步进电机和传统三相异步电机更可靠[5]。文章设计选用型号为GYS401D5-RC2的,带编码器反馈的松下伺服电机。电机驱动的移动平台称为KK模组,由滚珠丝杆和线性滑轨导引构成,其滑座同时为滚珠丝杆的驱动螺帽及线性滑轨的导引滑块。文章研究中选用的是HIWIN公司生产的型号为KK6005C-200A1-F0及KK6005C-300A1-F0的模组。
MPC08SP运动控制卡是一款通用控制器,用来完成运动控制的所有细节(包括脉冲和方向信号的输出、自动升降速的处理、原点和限位等信号的检测等等)。KK模组移动平台的两端极限位置都安装有一个限位开关,当触碰限位开关时,模组运动自动停止,避免运动超限破坏生长机构。

图5 晶体生长驱动机构实物图
使用铝合金材料制成运动执行结构的支撑架,高度可调使得支撑架能够用于不同尺寸规格的恒温水浴箱。同时支撑架和底板一起,利用其自身重量保持机构的稳定性,在电机启动停止的瞬间减轻冲击振动。
三轴运动式晶体生长驱动机构实物图如图5所示。
1.2 控制软件
晶体生长驱动机构控制软件采用VB[6-9]编程语言设计用户界面,并通过调用运动控制卡动态链接库的相关函数来编写程序,实现晶体生长驱动机构的运动控制。软件组成框图如图6所示,软件操作流程图如图7所示。
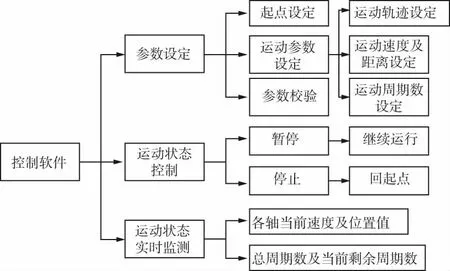
图6 软件组成框图
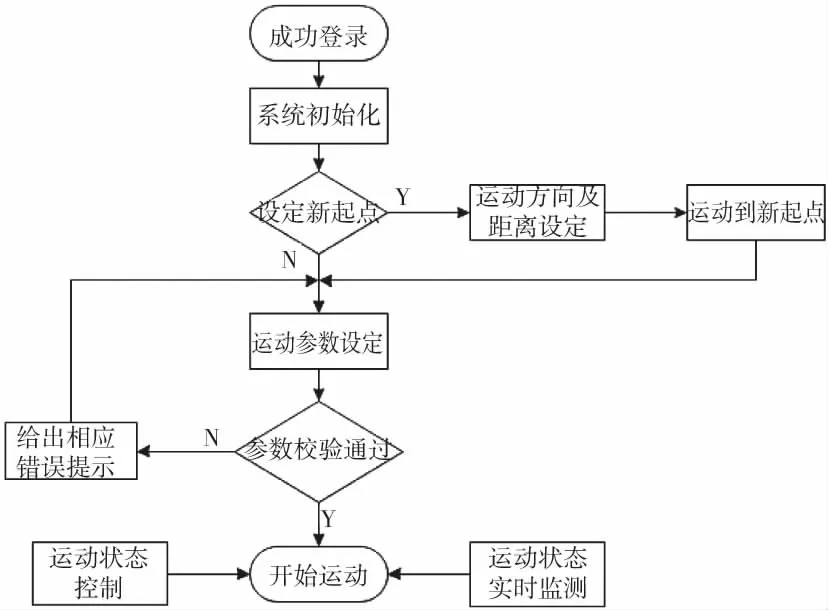
图7 软件操作流程图
为防止意外情况发生,系统初始化后,“开始”按钮默认不可用。运动参数设定好后,“参数校验”功能用来完成各运动参数的自动检查。若有运动参数设定错误(如:某轴运动距离设定值超过系统允许最大值,某轴运动速度设定值超过允许最大值等),软件会弹出相应错误警告,指出具体错误所在,按照提示内容修正即可。参数校验通过后,“开始”按钮变成可用状态。
为实时监测机构运动状态,运动状态实时监测模块利用相关函数读取各轴运动速度值及其上安装的伺服电机编码器反馈信号,确定各轴运动速度及当前位置值并实时显示。此外,设定的总运动周期数及当前剩余周期数亦可实时显示。
2 晶体生长实验
用纯度较高的KDP原料配制饱和溶液,用吊晶法准确测量饱和点温度,采用溶液降温法分别在传统转晶式及晶体生长驱动机构驱动方式下生长KDP晶体。使用美国PolyScience公司的9612型温控仪,控温精度0.01 ℃,籽晶采用尺寸为2 mm×2 mm×4 mm的优质点状籽晶,并用环氧胶固定在掣晶杆上。两种晶体生长方式下的运动参数如表1所示。
两种方式下的晶体生长时间均设定为48 h。此外,保证两种方式下其他培养条件完全一致。
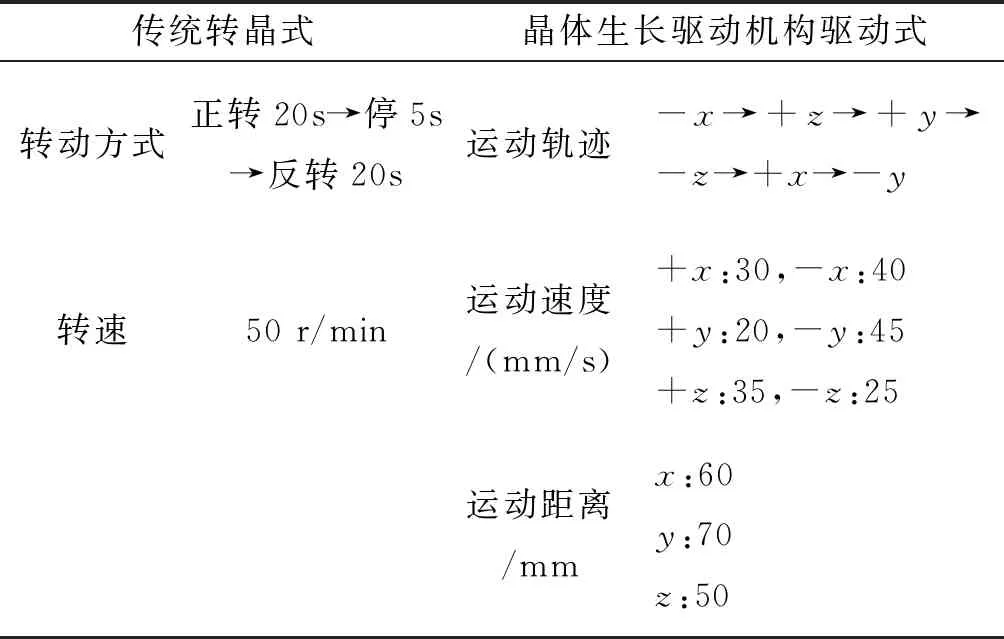
表1 两种方式下的运动参数对比
图8所示为两种晶体运动方式下长成的KDP晶体照片,图中坐标纸每一小格为1 mm。图8(a)中为使用晶体生长驱动机构带动挚晶杆做三轴直线循环运动所长成的KDP晶体,图8(b)中为转晶法长成的KDP晶体。可以看出,三轴运动式晶体生长驱动机构生长的KDP晶体边缘及表面更为光滑平整,形状更规则,透明度更好,且没有裂纹,在相同的生长时间内,其培养的KDP晶体尺寸为40 mm,较转晶法长成的KDP晶体更大。

图8 不同晶体运动方式下长成的KDP晶体照片
3 结论
通过不同晶体运动方式下的KDP晶体生长实验,可得到以下结论:
1)设计的运动轨迹及运动参数可变的三轴运动晶体生长驱动机构在硬件和软件方面都能很好地满足晶体生长实验的要求。软件界面友好,易于操作,且可以实现晶体运动轨迹、运动参数的任意变化。
2)利用三轴运动式晶体生长驱动机构长成的KDP晶体较之相同培养条件下转晶法长成的KDP晶体,其边缘及表面更为光滑平整,形状更规则,透明度更好,且没有裂纹,从而说明利用设计的晶体生长驱动机构培养KDP晶体能显著改善晶体性能,有效解决传统转晶法生长KDP晶体时容易出现裂纹、透明度差等晶体缺陷问题。此外,通过两种晶体的尺寸比较可知晶体生长驱动机构培养的KDP晶体尺寸更大,考虑到两种晶体的生长时间相同,说明利用该生长驱动机构生长晶体的效率更高。
