混合动力汽车增程发电匹配研究
2023-01-17魏英俊张兰春刘邦亚王贻巍
魏英俊,徐 哲,张兰春,刘邦亚,王贻巍
(1.重庆理工大学 车辆工程学院,重庆 400054;2.小康动力技术中心,重庆 401135;3.江苏理工学院 汽车与交通工程学院,江苏 常州 213001)
1898年,费尔南德·波尔舍博士制造了世界上首辆通过内燃机带动发电机为汽车轮毂中的电动机提供能量的汽车;1903年,Krieger公司也制造出通过汽车油机为使用电池组电能的电动机补充能量的汽车[1]。这两辆车所使用的串联式混动概念,成为后来增程式电动汽车增程器设计的基础概念。在全球汽车产业快速发展的历程中,能源消耗危机、排放污染加剧导致的温室效应,使行业的视角开始逐渐关注电动汽车的技术路线[2],并且由于纯电动汽车的续程焦虑,使得增程式电动汽车越来越受到重视[3],对增程电动汽车动力链的不同拓扑结构进行研究备受关注[4]。在汽车制造业端,通用、丰田、本田、宝马等车企都进行了增程式电动车的研究,国内的主要车企也同步展开了增程式电动汽车开发[5]。美国通用汽车公司对驾驶者日常使用模式进行研究,发现增程电动车使用工况的主要特征为纯电车工况特征;因此,将增程式汽车作为传统动力汽车向纯电动汽车发展过渡阶段的重要车型[6]。2007年,通用公司推出了带电量为16 kW·h、纯电行驶56 km、可充电、增程发电用1.4 L自吸发动机,可实现车辆续程的增程式电动汽车VOLT[7]。它采用P1+P3双电机平行布置架构的混合动力专用箱,在串联工作的混合牵引模式、发动机/发电机单一牵引模式以及驻车工况下发动机/发电机充电模式下作为发电功能的P1电机,同发动机共同承担增程发电的功能。此时,发动机并不直接承担车辆的驱动,而是以P1电机发电为负载,实现车辆的纯电驱动续程[8-9]。因此,如何实现发动机增程发电阶段与P1电机的高效匹配,是混合动力汽车专用传动装置的研究重点。
1 混动专用箱工作原理
如图1所示,为混动专用箱传动结构简图。由发电机通过增程发电一级主动齿与增程发电一级被动齿,实现发动机转速输出的提高,驱动P1电机实现发电。在电池SOC处于下限阈值时,P1电机增程发电驱动P3电机实现串联工作模式,从而提高车辆纯电续驶里程。

图1 混动专用箱传动结构简图
P1+P3架构的增程式电动汽车与具备串并联功能的混合动力汽车,其专用箱的区别在于:增程式电动汽车没有部件4,即湿式多片离合器,无法实现发动机直接驱动与P3电机电驱动的并联动力传动;而具备串并联功能的混合动力专用箱具备离合器部件,可实现发动机直接驱动以及与P3电机的并联动力传动。
2 增程发电匹配
2.1 实现高效增程发电的基本思路
增程发电匹配是将发动机工况与P1电机工况,通过增程发电的传动速比进行满足驱动功率要求下的发动机与P1电机高效区耦合。增程发电的效率越高,增程发电工况下的油耗则越低。
对于增程式电动汽车的增程动力总成以及混合动力汽车的动力总成,发动机的提升都朝着提高发动机的热效率方向发展。一方面,对于增程式电动汽车而言,发动机只承担发电作用,因此,可以研发更高热效率的增程专用发动机;另一方面,高效电机也是增程式汽车动力总成与混合动力总成研发的重点方向,如扁线油冷永磁同步电机是目前新能源高效电机的典型技术特征。在此基础上,实现高效发动机与高效电机的匹配。如图2所示,为一款满足增程动力总成以及混合动力总成的高效发动机的MAP特性图。如图3所示,为一款扁线油冷P1电机的效率MAP特性图。
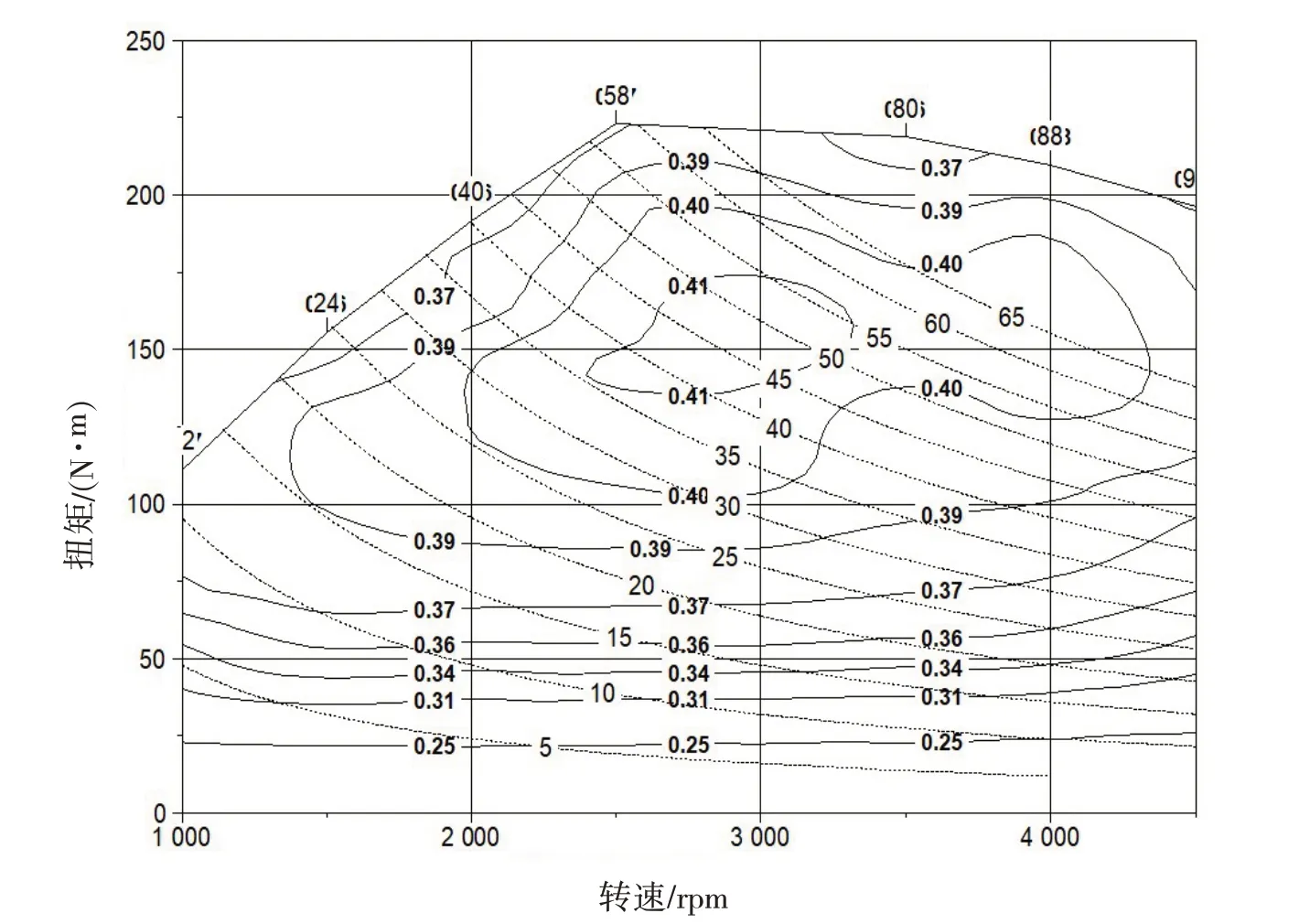
图2 增程动力总成用以及混合动力用高效发动机的MAP特性图

图3 扁线油冷发电机的效率MAP特性图
2.2 增程发电状态下发动机工况点的选择
当车辆电池电量达到设定的SOCmin阈值时,增程器发动机启动工作,此时,车辆的电量状态将由之前的电量消耗CD(Charge Deleting)转变为电量维持CS(Charge Sustaining)。当车辆进入增程发电状态后,发动机输出功率点的确定是增程器系统能量管理关注的重点。发动机输出功率需要满足整车驱动功率的要求,体现驾驶员意图,其输出功率大于整车需求功率时,剩余功率将向电池系统充电。
发动机响应工作点的确定应满足整车需求功率。如果发动机响应工作点的功率低于整车需求功率,这时,电池系统的电量还将继续减低,处于深放状态;如果发动机响应工作点的功率远大于整车需求功率,此时,将会有较大的电流给电池充电。然而,深放和深充两种状态均对电池的使用寿命不利。从能量转换的角度来看,发动机的输出机械能转换成电能储备在电池系统,将来再由电池系统转换为电机驱动能,这个过程使发动机的输出机械能增加了转换环节,降低了能量的使用效率。所以,发动机响应工况点的确定在满足整车需求功率的同时,要进行电量维持并控制剩余功率对电池的充电电流,做到尽可能减小功率差值,让电池处于浅充浅放状态。
增程式电动汽车的能量管理策略是产品研发的重要内容。李明等人[10]对基于规则的、实时优化的、全局优化的、智能控制的能量管理策略进行了研究,指出能量管理策略的实用性和控制效果之间的矛盾是亟待解决的关键问题之一。周维等人[11]对增程式电动汽车的CD-CS型能量管理策略与BL型能源管理策略进行了仿真对比研究。Moura等人[12]通过随机动态规划来优化能量管理,并将驱动循环模式以及燃油价格变化的因素列入考量范围,对比CD-CS型同BL型能量管理策略的表现。Pisu等人[13]对并联式混合动力能量管理策略的有限状态机、等价消耗最优化、H∞控制以及DP控制等四种控制策略进行了仿真对比研究。Lin等人[14]对并联式混合动力电车的能量管理进行研究,内容涉及基于规则的控制策略以及基于DP算法的改进规则控制策略,提出通过优化挡位选择、充放电规划以及电机的工作来降低发动机的负荷,从而提高车辆的燃油经济性。Salmasi[15]从控制方法的角度对混合动力能量管理策略进行阐述,提出对优化控制策略所带来的计算复杂性和控制器复杂性需要加以考虑,而这恰是产品工程中控制器软硬件开发需要重点考虑的因素。Banvait等人[16]提出基于规则控制策略在Prius和并联两种模式下的应用仿真,发现在CD-CS控制策略中,在相同电池容量下采用电助力的规则控制策略对于插电式混动汽车更加有效。Wirasingha等人[17]对插电式混动的控制方法进行了分类研究,阐述了不同控制策略的优缺点,指出采用何种控制方法取决于控制的模型以及控制器可实现的途径,基于规则控制的控制策略是比较容易实现的,而控制策略的实现基于目前控制硬件的实际能力与控制实时性的要求,这是产品工程量产开发中最为现实的出发点。王钦普等人[18]对插电式混合动力汽车能量管理策略的发展趋势、优化效果以及应用潜力进行分析与对比。牛继高等人[19]对增程电动汽车基于规则控制的发动机开/关能量管理策略、功率跟随能量管理策略、最优曲线能量管理策略以及功率分流能量管理策略进行分析与仿真验证,为基于实时控制的增程车能量管理策略的工程应用提供了参考。洪木南等人[20]对基于规则控制的开关式能量管理策略和分段式能量管理策略进行仿真对比,指出分段式能量管理策略对燃油经济性的优化效果更好。
通过对国内外相关文献的研究,基于实时性控制以及汽车控制器硬件的基础现状,从工程可实现角度,应采取基于规则的控制策略。通过发动机、动力总成台架以及整车标定,该局部多点功率跟随车辆低速低功率请求工况下的恒功率输出相结合的控制策略,具备控制实时性好、易实现的特点,成为基于规则的增程发电工况下的常用工程策略。
该策略下,发动机台架标定试验是基础,满足整车需求功率Prep为约束条件的发动机映射输出功率下等功率曲线上的最高效率工况点,即为发动机在该输出功率下的最优工作点。将发动机的输出功率在可工作范围内均分为若干个点,采取同样的方法可求出各输出功率下发动机最高效率的最优工作点,形成满足整车请求功率的发动机最优标定工作线。如图4所示,在此标定工作线的基础上,再结合发动机排放工况以及NVH工况进行适度修正,最终形成增程发电工况下的发动机多点功率跟随工作曲线。该策略综合考虑了发动机响应特性、功率请求、发动机效率、排放以及NVH等多个因素,并且同发电机的高效率区映射耦合。

图4 发动机功率跟随下多点工作特性图
在SOCmin阈值下,增程器工作,发动机输出功率响应整车的需求功率。整车需求功率与扭矩为:

式中:Prep为差速器端整车需求功率;Cf为车辆滚动阻力系数;Mv为车辆整备质量;α为坡道角度;ρ为空气质量密度;Cd为车辆风阻系数;A为车辆风阻面积;v为车辆运动速度;δ为车辆旋转质量转换系数。
驱动P3电机的输出功率为:
式中:PTM为驱动P3电机输出功率;ηTM为驱动P3电机机械效率;ηtrans_1为驱动P3电机一级减速传动链的机械效率;ηdiff为主减传动链的机械效率。
增程发电P1电机的输出功率与输出扭矩为:
式中:PGM为增程发电P1电机的输出功率;ηGMCU为电机控制器发电效率;ηGM为增程发电P1电机机械效率;TGM为增程发电P1电机的输出扭矩;nGM为增程发电P1电机的转速。
发动机ICE的输出功率为:

式中:PICE为发动机飞轮端输出功率;ηICE为发动机机械效率;ηtrans_2为发动机驱动增程发电机P1的传动链效率;TICE为发动机飞轮端输出扭矩;itrans_2为发动机驱动增程发电机P1的传动链速比;nICE为发动机飞轮端转速。
增程驱动工况下的发动机功率跟随,发动机的机械能-电能-机械能转化到驱动电机P3的实际功率与整车请求功率差值,成为电池系统的输出功率或充电功率,即:

式中:ηTMCU为电机控制器驱动P3电机效率。当ΔP为正值时,增程发电的发动机请求输出功率大于整车实际需要的驱动功率,富余功率将向电池系统充电;当ΔP为负值时,电池系统放电补充整车实际功率不足,因而实现混合牵引模式,在此发动机工况点上,电量依然无法维持电平衡状态,发动机将切换到临近的更大的一个功率输出工况点。
在图2所示发动机1 000~3 700 r/min的工作区域,基于整车需求功率Prep以及Prep、PTM、PICE的关系,确定PTM和发动机特性MAP图中的PICE工况点(图4)。
如图5所示,通过itrans_2传动速比来调整TICE与TGM以及nICE与nGM的映射,进行发动机特性MAP与增程发电机P1特性的耦合,使发动机的输出功率既能满足整车功率的要求,又能使发动机和增程发电机P1工作在高效率区。

图5 发动机与发电机特性耦合
根据整车需求功率确定了发动机高效区内的多个工作点。根据itrans_2传动链中心距及传递最大功率与扭矩的约束,itrans_2在itrans_2_min~itrans_2_max的取值变化中,发动机特性工作点下的输出功率映射到增程发电P1电机的工作区域,即选择的itrans_2设计边界值能够实现电机的响应工作点,更多地穿越了电机的高效工作区。
基于前文规则控制策略下的增程发电工况,对某增程型SUV进行了实车测试,如表1所示,为整车相关参数。

表1 整车相关参数
如图6所示,为基于城市工况和高速工况,发动机功率跟随请求下发电机工作响应的SOC实车验证测试。
由图6可看出,在不同车速及路面下,当整车需求功率发生变化时,发动机多点跟随体现在发电功率变化下的电池系统SOC始终处于一个非常平稳的浅充浅放状态。这样,发动机的输出功率能够更高效并直接用于车辆驱动,表明该控制策略较好地匹配满足了产品的控制需求。

图6 车辆路面行驶试验中增程工况下的SOC状态
3 结论
在增程式或具备串并联功能P1+P3架构双电机混合动力总成串联工作模式的增程发电工况下,首先,进行基于规则控制策略的整车功率需求下发动机最优工作曲线的确定;然后,再进行发动机工作特性与电机特性的耦合优化分析,来确定最佳发动机驱动增程发电机P1的传动链速比,实现串联模式下的增程发电。从而使发动机与电机均工作在高效重叠区并维持电平衡,确保SOC处于一个非常平稳的浅充浅放状态。
