基于固液动力空空导弹的协同制导律建模与仿真
2023-01-17梁伟栋张顺家赵洪峰
梁伟栋,齐 麟,张顺家,桑 晨,赵洪峰
(1.上海机电工程研究所,上海 201109;2.上海交通大学航空航天学院,上海 200240)
随着现代战场中复杂多变的作战环境和高速机动目标的出现,除了提升导弹自身的精确制导能力以外,采用多导弹的分布式协同作战策略还能够进一步提高对机动目标拦截的成功概率。因此,多导弹间的分布式协同作战方式受到了国内外学者的广泛关注[1]。多导弹协同作战方式需要发展诸多相关技术,其中制导律对导弹的制导精度起着关键作用,很大程度上决定了导弹能否成功拦截目标。因此,多导弹协同制导律是分布式协同拦截的关键技术之一,对协同制导律开展相关的研究工作将对提升导弹精确制导技术和多导弹协同作战效能产生重要影响[2]。
目前多导弹协同制导的一种典型形式是时间协同,即对多导弹到达目标的时间进行协调,以实现尽可能同一时间击中目标,从而给对方目标造成较大压力以提高摧毁目标的能力。根据协调信息来源,协同制导律一般分为简单协同[3-5]、集中式协同[6-7]和分布式协同[8-9]。简单协同提前给各导弹设置制导时间,各导弹间并没有信息交换和共享,本质上属于开环控制;集中式协同存在一个集中协调单元与所有导弹通信,能够实现闭环控制,但是一旦集中协调单元被破坏则无法继续完成协同制导的任务;分布式协同是指通过相邻导弹间的局部通信,并不存在一个集中协调单元,取而代之的是分散在各枚导弹中的协调信息运算单元,因此具有对通信要求低、抵御外界干扰能力强、可扩展性和协同效果好等优点,从而成为了近年来研究的热点方向[10]。
当前对多导弹协同制导律方面的研究工作大多基于巡航动力体制的导弹,导弹速度可连续控制,对于以固体火箭发动机为动力的导弹研究较少,原因可能是在固体发动机点火完毕后,导弹的速度较难控制。采用固液火箭发动机[12-13]的空空导弹,由于其具备多次启停能力,可以在保证射程的同时调节导弹的速度,实现多弹协同攻击目标。本文选取采用固液火箭发动机的空空导弹为对象,研究多弹协同制导问题。
固液混合火箭发动机是采用液体氧化剂和固体燃料的火箭发动机,其典型工作过程为:发动机启动时,氧化剂增压输送系统将氧化剂增压后输送至燃烧室,点火后固体药柱表面热解形成的燃料气体与通道内的氧化剂混合燃烧,将推进剂的化学能转化为热能,通过喷管加速喷出后转化为燃气动能,燃气对发动机的反作用产生推力。因此,固液火箭发动机只需调节其氧化剂流量即可控制发动机的启停及推力的调节,实现对导弹速度的控制。
本文针对固液发动机特点,研究了基于发动机多脉冲点火的分布式多弹协同制导律,实现弹群在命中时间上的协同,并进行了仿真试验,验证了算法的有效性。
1 协同制导模型
针对平面拦截问题,导弹与目标的相对运动几何关系如图1所示,图1中Mi代表第i枚导弹,T代表拦截目标,ri代表Mi与T之间的相对距离,qi代表Mi的视线角,vMi和vt分别代表Mi和T的速度,θMi和θt分别代表Mi和T的弹道角,aMi和at分别代表Mi和T的法向加速度,其中i=1,2,…,n,n为导弹总枚数。
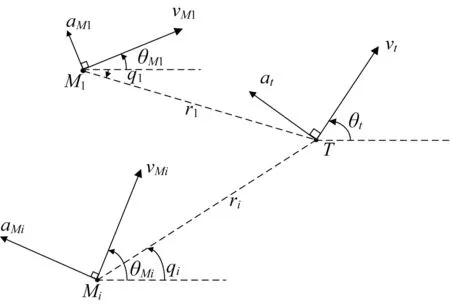
图1 多导弹与目标的相对运动几何示意图Fig.1 Geometry diagram of relative motion of multiple missiles and target
第i枚导弹与目标之间的相对运动可表示为

其中,̇为ri对时间的导数;̇为qi对时间的导数;为θMi对时间的导数;̇ 为θt对时间的导数。将式(1)和式(2)分别对时间进行求导,并与式(3)和式(4)相结合可得
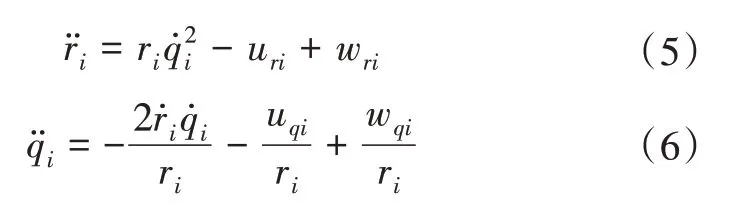
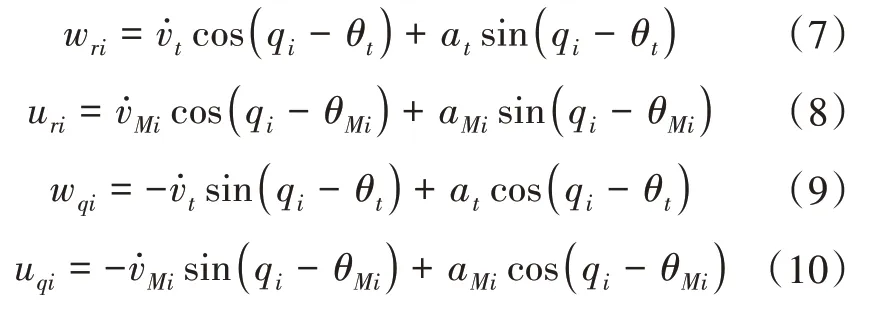
其中,̇为vt对时间的导数;为vMi对时间的导数。
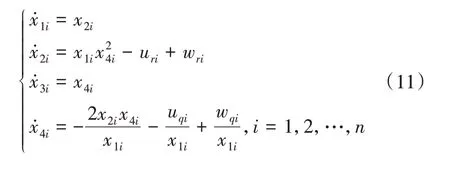
令x1i=ri,x2i=̇,x3i=qi-qdi=qei,x4i=̇,其中,qdi为Mi的期望视线角,qei为Mi的视线角偏差,则由式(5)和式(6)可得多导弹协同制导模型为
2 协同制导律设计和点火策略设计
在传统的制导律设计过程中,一般只考虑视线法向的加速度指令以保证导弹命中目标,在协同制导律设计中,为了保证时间上的协同,需要设计视线方向的加速度指令,保证弹目相对距离在有限时间内趋于一致。本章节首先设计了基于观测器的有限时间协同制导律,推导出了视线方向的指令模型,后将指令模型转化为固液发动机点火指令模型,实现对导弹速度的控制。
2.1 基于观测器的有限时间协同制导律设计
时间上的协同制导问题可以转化为多智能体有限时间一致性问题,进而可以采用代数图论基本理论进行计算求解。具体地,针对式(11)中的前2 个方程组成的协同子系统为

引入变量xi=x1i,vi=x2i,ui=x1ix24i-uri可以将式(12)转化为

其中,xi代表弹目相对距离,vi代表弹目相对速度,ui表示等效的控制输入,初始条件为xi(0)=xi0,vi(0)=vi0。因此,只需要设计合理的ui(i=1,…,n),并选取合适的参数,就可以确保xi,vi(i=1,…,n)在有限时间内趋于一致。
引理1:考虑式(13),己知其通信拓扑结构图G 是无向并且是连通的,设计控制输入式(14),可以保证系统状态在有限时间内趋于一致。

其中,0 <αi<1(i=1,2,3),2(α1-α3)=(1 +α1)α2,sig(·)α1=|·|α1sgn(·),ψ1和ψ2是奇函数,存在正数bi(i=1,2),yψi(y)>0(∀y≠0 ∈R) 和ψi(y)=biy+o(y)(∀y≠0 ∈R)(在0的域内)成立。
由引理1 可知,设计式(14)的制导律可以使得式(12)的状态可以在有限时间内趋于一致,即剩余飞行距离和相对速度在制导过程中趋于一致。
式(15)中,wri为外界干扰,目标的加速度是有界的,则有|wri|≤wMi,wMi是干扰的上界,对于无法直接获得wri上界的情况,可以根据HE[14]和周慧波[15]干扰观测器设计方法,通过设计如式(16)所示的观测器来实现对目标机动信息的实时估计。
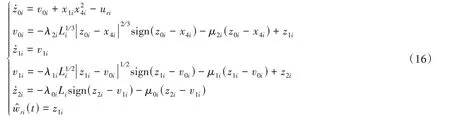
其中,λji,μji>0(j=0,1,2,i=0,1,2),ŵri(t)是系统外界总干扰wri的估计值。通过进一步分析可知,通过选取适当参数,便能在有限时间内实现估计值ŵri收敛到实际值wri。
2.2 基于发动机脉冲工作特性的点火逻辑设计
为了实现对高速目标的协同拦截,导弹需要具备视线方向制导能力,且为连续制导。然而,现阶段下固液动力导弹无法实现对速度的连续控制。因此,本文基于固液火箭发动机的脉冲点火工作特性,将所设计的协同制导律进行坐标转化,以获得在弹道系下的导弹实际需求过载,从而在弹道系x方向上实现导弹速度控制视线方向指令(式(15))转化至弹体系x方向,并根据发动机特性设计点火模型,具体实现思路见图2。

图2 发动机点火逻辑Fig.2 Engine ignition logic
当弹体系x方向的导弹过载需求累加到一定值时,便会触发固液发动机点火条件,此时发动机开始工作。当本次发动机点火完毕后,对累加过载进行清零处理,然后继续进行指令积累,实现下一次点火判断。发动机点火指令在制导律设计流程中的作用见图3。

图3 基于发动机脉冲工作特性的分布式协同制导律设计流程图Fig.3 Design flow chart of distributed cooperative guidance law based on engine pulse operating characteristics
2.3 视线角约束新型偏置比例导引律设计
本节针对目标在一个平面(纵向或者侧向)进行分析。弹-目相对运动关系如图4所示。
根据图4有如下关系成立:
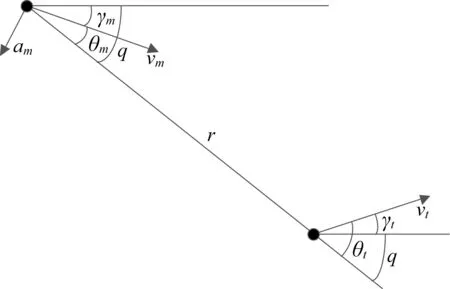
图4 弹-目相对运动关系Fig.4 The relative motion of a missile to target

其中,θt=γt-q,θm=γm-q,ρ=vt/vm。
(四)非独立的尖翎鸟纹。反山遗址出土玉琮、玉钺上的神人兽面纹上神人的上臂靠近肘部左右各有一个尖翎鸟纹,神人兽面纹的下部左右下腿近爪处也有一个尖翎鸟纹。
如果方程

存在解qd,则可以得出
(1)如果给定γt,γd,则式(18)存在唯一解;
(2)如果给定γt,γd,则存在唯一解γ*d满足式(19)。

式(18)与式(19)说明在平面内期望视线角与期望攻击角存在相互转换关系。
传统的比例导引可以分为纯比例导引和真比例导引。本节设计一种带有时变偏置项的偏置比例导引律,即

其中,

式(22)中,β∈(0,1 -ρ),η>0。
同理,对于侧向平面,设计偏置比例导引律为

其中,

其中,β1∈(0,1 -ρ),η>0。
经过分析,参数和的取值需要满足下面的初始航向角误差和初始视线角误差,即
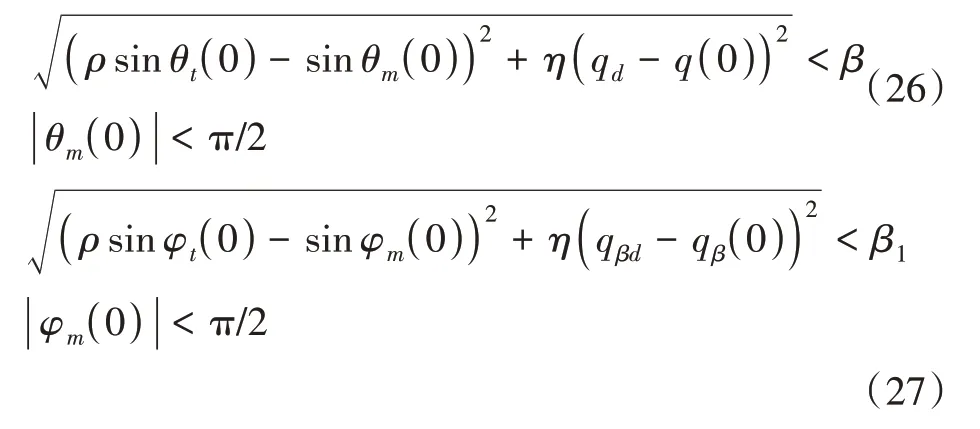
参数η的取值需满足下列条件:
对于迎头拦截,η=1.1~1.3;对于尾追拦截,η=0.7~0.95。
3 仿真结果及分析
导弹纵向、侧向均采用视线角约束新型偏置比例导引律制导律,利用协同制导律及点火策略模型,本文对3枚导弹的弹群进行了3组仿真试验,相应的初始条件见表1。发动机点火策略为固液火箭发动机先进行长时间点火,用于满足射程需求;当每发导弹距目标小于协同点火门限距离L(L∈[30,55],单位:km)时,采用本文的协同制导律-点火策略模型。除了初始点火外,末段导弹最大点火次数约束设置为20次,每次点火时长为2.3 s。

表1 3组仿真试验的初始条件Tab.1 Initial conditions of three sets of simulation tests
为了体现协同制导的控制效果,分别在各组仿真试验中将协同制导和非协同制导在同样的初始条件和约束下进行仿真,3 组仿真试验的结果依次见表2-4,图5(a)、(b)分别是编队非协同和协同攻击静止目标的弹道轨迹,图6是与之对应的过程关键参数。
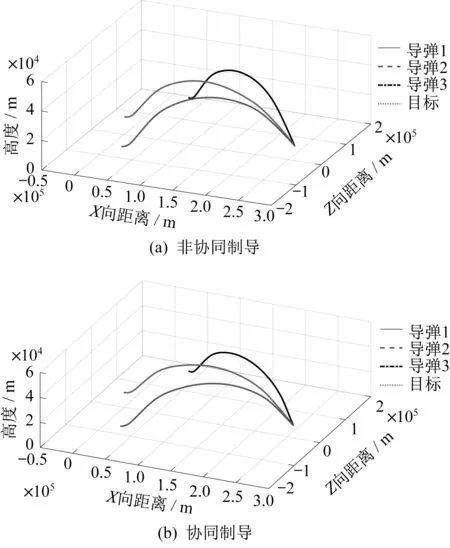
图5 针对静止目标(仿真序号1)的弹目运动轨迹Fig.5 Projectile movement trajectory for stationary target(simulation number 1)
从仿真结果可以看出,采用协同制导的3 枚导弹到达目标的时间与非协同制导仿真中最快到达目标的导弹所用时间几乎相同,即并没有延长打击目标所用时间,但是将3 枚导弹到达目标的时间差缩短80%左右,达到了时间协同的目标,从而能够有效提升打击成功率。协同作战模式下3 枚导弹几乎能够同时到达拦截目标,得益于采用的固液发动机具有的脉冲点火特性,从图6(d)中可以看到由协同制导所需的连续指令所转化而成的方波形式的发动机推力曲线。从仿真结果还可以看出,由于在末制导段中发动机进行数次点火,采用协同制导策略的导弹还具有较大的终端速度,较大的动能也可进一步提升打击成功率。

图6 针对静止目标(仿真序号1)的过程关键参数Fig.6 Process key parameters for stationary target(simulation number 1)

表3 针对迎头直线目标(仿真序号2)的仿真试验结果Tab.3 Simulation test results for heed-on straight line target(simulation number 2)
4 结 论
本文以空中目标为背景,选取固液火箭发动机动力的空空导弹为研究对象,基于图论理论设计了分布式多导弹协同制导律,并根据固液发动机多脉冲点火的工作特性设计了发动机点火策略,在此基础上分别对静止、直线飞行和盘旋飞行的3 个目标进行了协同制导仿真分析。仿真试验结果表明,所设计的协同制导律和发动机点火策略能有效地实现时间协同攻击目标的任务,且导弹的终端速度也大幅度提升,能够进一步提升打击效能。

表4 针对迎头盘旋目标(仿真序号3)的仿真试验结果Tab.4 Simulation test results for heed-on circling target(simulation number 3)
