磁力耦合机电产品电磁-结构多场联合仿真方法研究
2023-01-17蒋圣鹏唐晓峰李佳圣侯如非王艺伟
蒋圣鹏,唐晓峰,李佳圣,侯如非,王艺伟
(上海机电工程研究所,上海 201109)
磁力耦合机电产品被广泛应用于工业、装备等领域,其机电特性研究是设计应用的基础。目前对于磁力耦合机电产品的研究可分为解析法、动力学仿真和电磁仿真。陈兴球[1]应用靶板变形理论和经典力学方法计算了激活机构的撞击能量与热电池底部激活部分厚度的关系,试验结果表明该方法具有较好的准确性;梁东升[2]进行了引信电源旋转撞击和翻转限制机构的动力学仿真,仿真结果证明了激活装置可有效激活热电池;朱春晖[3]基于Maxwell 软件对磁后坐能源进行了电磁仿真,得出了各个尺寸大小与电源的感应电动势和功率的关系曲线,并用于指导激活机构的设计。孔超等[4]通过多体动力学仿真进行了某导弹电磁弹射装置的发射稳定性分析,验证了电磁弹射技术在某型导弹发射上应用的可行性。杨毅钧等[5]通过Maxwell二维和三维电磁仿真试验,进行激活器衔铁构型的优化,并通过试验验证了该方案的可行性。
以上对于磁力耦合机电产品的研究均通过单一场的计算完成,但磁力耦合机电产品中的电磁-结构耦合特性较为复杂,单一场仿真无法充分反映产品电磁-结构耦合工作特性,需进行电磁-结构多场联合仿真。
本文以激活装置为研究对象,提出了一种带扭簧蓄能机构的激活装置,基于麦克斯韦电磁场方程和结构动力学方程计算并分析激活装置输出电压及其影响因素。通过电磁-结构多场联合仿真计算激活装置磁力参数和输出电压,测试激活装置性能,搭建测试系统并获取激活装置输出电压,验证磁力耦合机电产品中的电磁-结构多场联合仿真计算方法的准确性。
1 研究对象
本文提出了一种带扭簧蓄能机构的激活装置如图1所示,由激活扳手、主动轴、蓄力扭簧、激活器等组成。其中激活器又包括从动轴、衔铁、永磁体、线圈等,结构如图2所示。
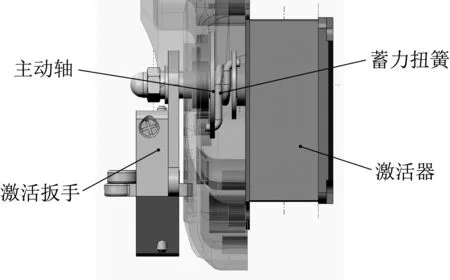
图1 激活装置Fig.1 The activation device
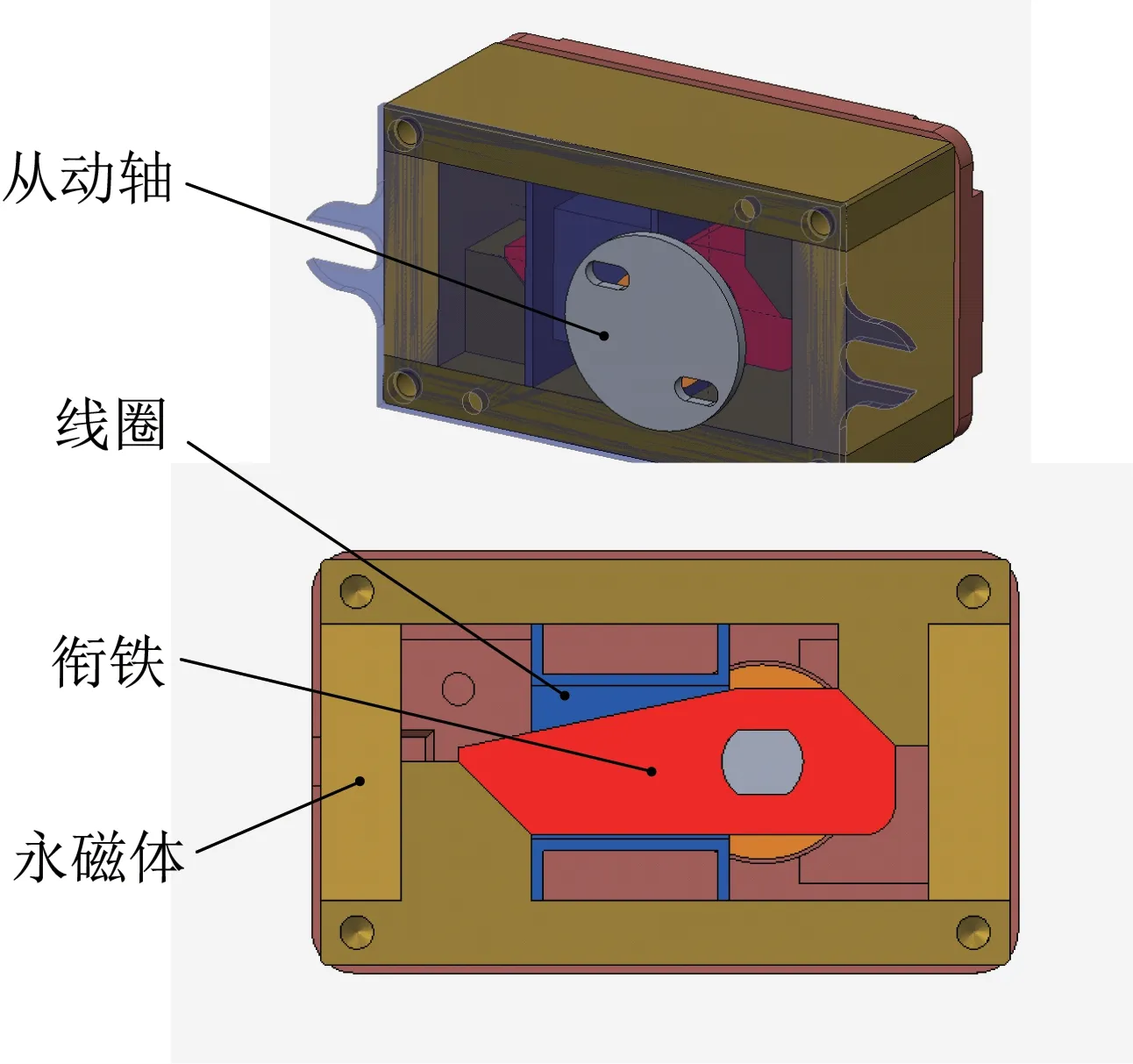
图2 激活器结构Fig.2 The structure of activator
蓄力扭簧两端分别插入主动轴和从动轴中,通过扣动激活扳手使主动轴转动,与从动轴产生位移差,随着位移差的增大蓄力扭簧持续蓄力,当蓄力扭簧的转矩大于永磁体对衔铁的磁力矩时,扭簧将衔铁高速弹开,激活器磁路变化使穿过线圈的总磁通量发生变化,产生感应电动势。该装置依靠蓄力扭簧提升激活瞬间衔铁转动速度和速度的一致性,保证了激活装置电压幅值和电压输出的一致性。
2 研究方法
2.1 电磁-结构仿真理论
基于麦克斯韦方程组进行激活装置电磁计算[6],即
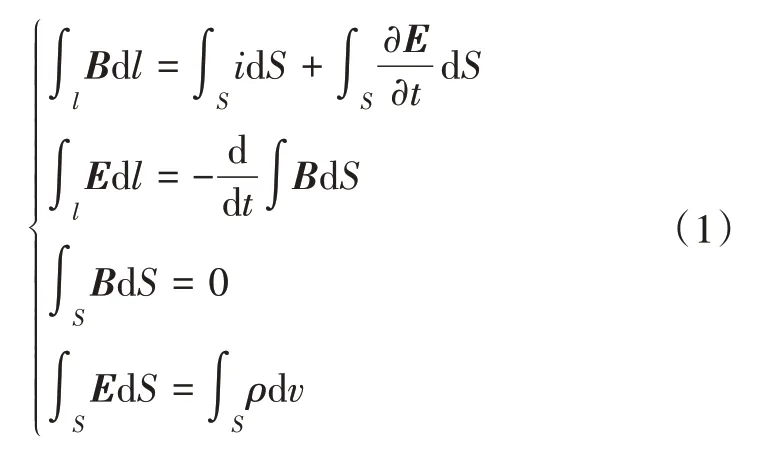
式(1)中,B为磁场强度;S为线圈截面积,i为经过环路曲面的电流;E为电场强度;ρ为电荷。
根据式(1)中的第二个方程,激活器线圈两端电势差为

式(2)中,V为感应电动势;E为电场强度;N为线圈匝数;B为磁场强度;S为线圈截面积,ω为衔铁转动角速度;α为转角。
考虑电路线阻,激活器输出电压作用于火工品的电压为
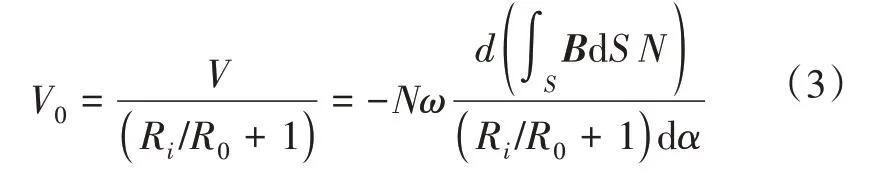
式(3)中,V0为火工品两端激活电压;Ri为线圈内阻;R0为火工品阻值。
激活装置磁力大小可由麦克斯韦电磁力公式计算[7],即

式(4)中,φ为工作气隙磁通;μ0为真空磁导率。
激活装置全工作流程可分为两个阶段。
第一阶段:激活扳手以角速度ω绕轴匀速转动,磁力矩(Tm)克服衔铁偏心重力矩(Tg)和扭簧弹力矩(Ts),使衔铁吸附在侧板上。激活装置各项参数如下所示:
式(5)中,α为激活扳手转角,β为衔铁转角,k为扭簧刚度。
第二阶段:扭簧弹力矩Ts>Tm0+Tg,衔铁弹开并加速运动。加速过程可由动力学方程描述,即

式(6)中,磁力矩Tm随衔铁转角变化而变化,可通过式(4)计算得到;衔铁转速和转角可通过计算动力学方程如式(5)和(6)求解;线圈磁通量与衔铁转角有关,因此,可将衔铁转角作为式(2)的输入计算激活装置输出电压。
2.2 电磁仿真建模
在激活装置三维电磁有限元建模前,为了便于仿真计算,对模型进行了合理简化:
(1)线圈中单根导线横截面积较小,忽略涡流产生的不均匀效应;
(2)模型材料各向同性,可忽略磁滞的影响;
(3)计算参数均为25℃下的标准值,忽略磁导率和电导率受温度影响。
基于以上假设,进行激活装置三维电磁有限元建模,保留主磁路元件,包括永磁体、两个侧板和衔铁。其中永磁体材料为 N48H 钕铁硼,剩磁Br≥13.49KGS;矫顽力Hc≥1032KA/m;磁能BHmax≥349.9kJ/m3。衔铁和左右侧板材料为电工纯铁DT4E,矫顽力Hc≤48KA/m;矫顽力时效增值ΔHc≤4.8KA/m;最大磁导率μm≥0.0113H/m。
求解类型选定为静磁场求解,激励由永磁体提供,无需额外设置,指定模型边界,将空气界面法线方向磁感设为0。为了研究磁力矩随衔铁角度的变化情况,将衔铁角度变量设置为0~20°,步长为0.1°,最终得到三维电磁仿真模型如图3所示。
图3 激活装置三维电磁仿真模型Fig.3 Electromagnetic simulation model of the activation device
2.3 动力学仿真建模
在电磁仿真模型的基础上,建立动力学模型。将电磁仿真中的磁力矩-角度计算结果以Spline 的形式输入Adams,在Adams 软件中建立激活装置的动力学仿真模型,如图4所示。

图4 激活装置动力学仿真模型Fig.4 Dynamic simulation model of the activation device
扳手、衔铁和转轴添加铰链约束,衔铁上施加顺时针方向磁力矩,磁力矩随角度变化情况通过电磁仿真得到。衔铁与连杆之间定义扭簧,激活扳手以5(°)/s的角速度逆时针匀速转动。激活装置蓄力角α0=10°,扭簧刚度k=80N · mm/(°),预紧力=400N · mm。
3 电磁-结构仿真结果
基于麦克斯韦电磁场方程,建立激活装置磁场得到磁场强度云图和磁力线分布如图5所示,磁力矩随角度变化情况如图6所示。激活装置处于静平衡位置即衔铁角度为0时,激活装置磁力矩为0.83 N·m。随着衔铁角度增大,磁力矩逐渐减小。

图5 激活装置磁场强度云图Fig.5 Magnetic flux density of the activation device

图6 激活装置磁力矩-角度关系曲线Fig.6 Magnetic moment curve of the activation device
将电磁仿真得到的磁力-角度值作为动力学仿真的输入,对激活装置进行动力学仿真,得到仿真计算结果如图7所示,结果表明当激活扳手以5(°)/s 的角速度匀速转动,衔铁在0~1 s 静止不动,这是由于衔铁所受磁力矩小于扭簧弹力矩,衔铁被紧紧吸住。当弹簧压缩量达到10.4°后,衔铁所受弹力矩大于磁力矩,衔铁脱开并进行加速运动,衔铁运动10°后,弹簧弹力矩与磁力矩平衡,衔铁开始随连杆一起以5(°)/s 的角速度匀速转动。衔铁脱开瞬间由于扭簧弹力矩作用,衔铁将会以最大3043(°)/s的速度切割磁感线。

图7 动力学仿真结果Fig.7 Dynamic simulation results
将动力学仿真计算得到的衔铁角度-时间关系θ=f(t)代入电磁仿真计算的磁通-角度关系F=f(θ)中,可求得激活装置磁通随时间变化的曲线,如图8所示。通过式(3)可计算激活装置输出电压,如图9所示。仿真结果表明,衔铁脱开瞬间通过线圈的磁通发生突变,根据电磁感应原理,线圈产生较大电压,最大电压可达1.95 V。
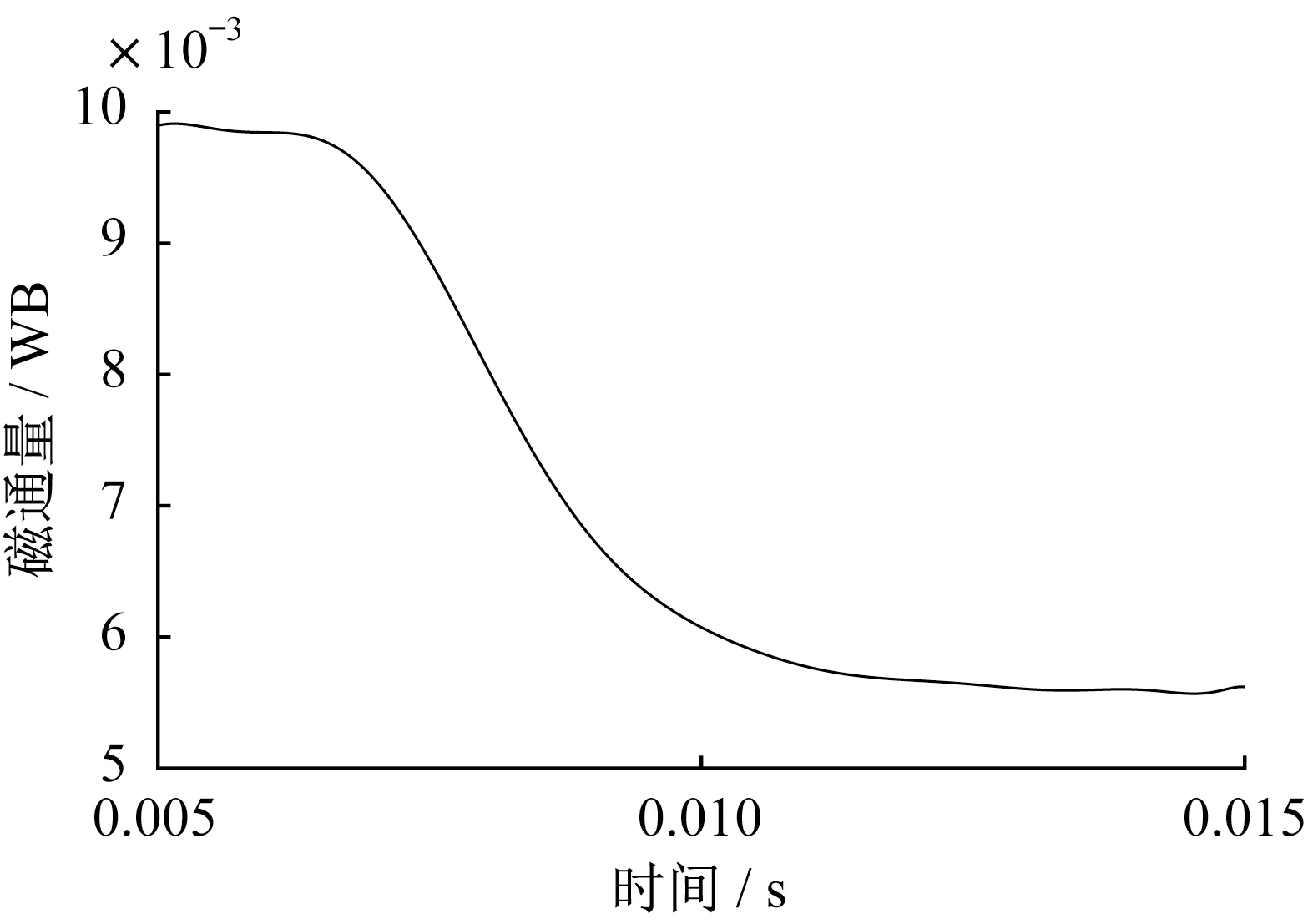
图8 激活装置磁通量-时间关系曲线Fig.8 Magnetic flux-time curve of the activation device
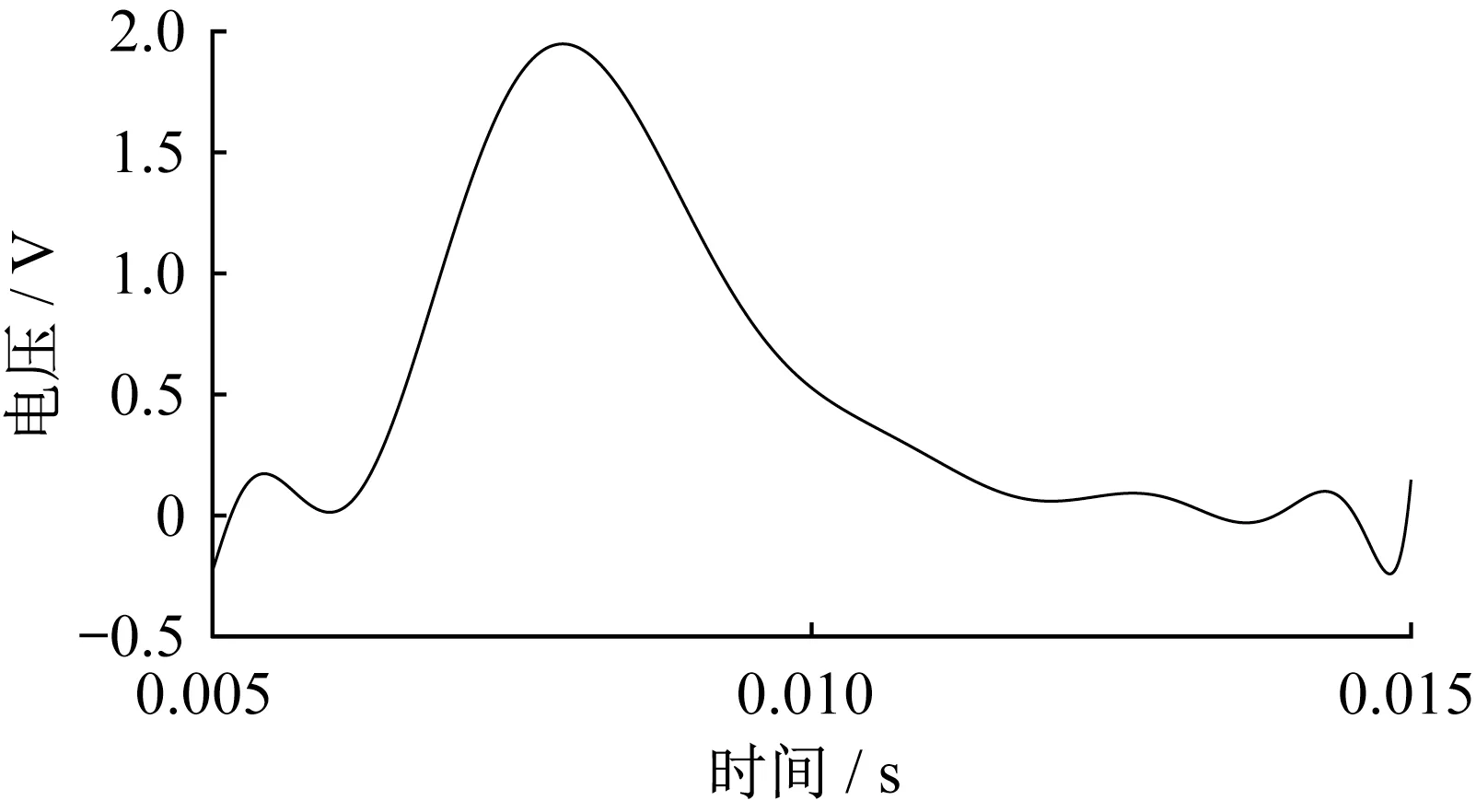
图9 激活装置输出电压-时间关系曲线Fig.9 Voltage-time curve of the activation device
4 激活装置性能测试验证
为验证激活装置输出电压,对激活装置进行磁力矩和输出电压测试。磁力矩测试时,在激活器输出轴上增加转接力臂工装,使用推力机推动转接工装,根据脱开瞬间推力机推力换算得到磁力矩。在进行输出电压测试时,根据如图10(a)所示的电路原理图搭建测试电路如图10(b)所示,其中激活器作为电源,1 Ω 电阻作为火工品模拟负载,示波器用于测试负载的脉冲电压-时间关系。
图10 输出电压测试系统Fig.10 Output voltage test system
通过激活装置磁力矩和输出电压测试,得到测试结果如表1所示。磁力矩仿真计算误差为4.65%,输出电压仿真计算误差为2.60%,仿真与试验结果误差在5%以内,验证了仿真方法的准确性。

表1 激活装置测试结果Tab.1 Test result of the activation device
5 结 论
为充分反映机电产品电磁-结构耦合工作特性,本文提出了一种电磁-结构多场联合仿真方法。基于麦克斯韦电磁场方程和结构动力学方程分析了激活装置输出电压及其影响因素,构建电磁-结构多场联合仿真模型并开展仿真计算方法研究,最后通过激活装置电压测试验证计算方法的准确性。得到结论如下:
(1)本文所述的电磁-结构多场联合仿真方法可充分反映磁力耦合机电产品的工作特性,获取产品的电磁参数和动力学参数。
(2)电磁-结构联合仿真方法具有较高的计算精度,与试验测试结果对比误差可控制在5%以内。
本文提出的电磁-结构联合仿真方法对磁力耦合机电产品性能研究具有参考价值。
