激光雷达成像目标回波模拟时空匹配方法
2023-01-17王超峰王帅豪张业鑫冯晓晨孟宇麟
王超峰,王帅豪,张业鑫,冯晓晨,张 琰,孟宇麟,田 义
(上海机电工程研究所,上海 201109)
激光雷达是以激光测距技术为基础,通过发射激光脉冲信号照射目标并由探测器接收来自目标不同的有效光学截面的回波信号,根据激光信号到达各个目标点和返回的飞行时间,形成角度-角度-距离图像,进而构建出目标三维图像[1]。随着激光雷达探测装置的快速发展,激光雷达凭借分辨率高、探测精度高、抗干扰性强等众多优点,逐渐成为国内外军事领域、民事领域的研究热点。到目前为止,激光雷达已经在武器精确制导、空中侦察和飞行器避障等方面广泛应用[2-4]。
激光雷达成像制导武器装备研制过程中,需要大量的试验来测试其性能,但外场飞行试验易受天气环境状况影响,成本高,周期长且不可重复。半实物仿真可以克服这些缺点,并能够对激光雷达信号的整个传输过程进行实时模拟,产生与实际相符的激光雷达回波信号,更具可控性和重复性,可缩短研制周期[5]。
激光雷达回波场景模拟器是半实物仿真系统的关键部分[6-8],其作用是生成与被试激光雷达探测设备时空匹配的目标和背景回波信号。时空匹配精度决定了回波信号的模拟精度。因此,国内外逐步开始对激光雷达回波场景模拟及时空匹配方法开展相关研究。
国外各军事强国都非常重视激光雷达回波场景模拟器的研究[9-12],2003年英国BAE 提出了利用光学MEMS 微镜阵列构造回波信号模拟显示装置,图像生成计算机将强度和距离相关的信息通过总线输入到垂直腔面激光器(VCSEL)的驱动器中。脉冲波形生成算法将强度信息、距离信息通过总线输入MEMS 的控制器。VCSEL 的驱动器控制VCSEL 输出激光,照明MEMS 的微反射镜阵列,MEMS 的控制器控制微反射镜阵列中相应的反射镜偏转,每4 个反射镜反射的激光合成一路延时回波波形,经过空间滤波和校准后在中继像面上实现图像显示,最后通过准直系统进入被测导引头入瞳。该方案利用光学MEMS 微镜阵列可以减少激光器、延时器、光调制器的数量,进而降低成本,减小尺寸。但是这种技术实现起来主要瓶颈在于大规模的VCSEL阵列,目前仍处于概念阶段。
国内也在逐步开展激光雷达回波目标模拟技术的研究,开始在实验室环境下研制激光雷达回波目标模拟器。北京理工大学在2019年提出了一种基于可编程全光延时阵列的回波信号模拟方法[13],生成的激光雷达回波信号阵列大小为32×32,为激光雷达回波信号的模拟提供了一种新的途径,但目前仅进行了系统的关键功能概念验证,并对多路延时通道进行了实验验证,其他硬件系统仍处于开发阶段,尚未集成出整套激光雷达回波信号模拟系统。
上海机电工程研究所于2020年提出了基于DMD(微快门阵列)区域分割的激光雷达成像目标回波信号模拟方法[14],生成三维图像空间,分辨率为64×64×12像素。本文以该方法为基础,提出激光雷达成像目标回波信号与被试激光雷达探测器的时空匹配方法,通过硬件与软件相结合的手段降低目标模拟系统的像素与被试激光雷达探测器像素的时间和空间的匹配误差,提升时空匹配精度,指导后续激光雷达回波目标模拟器的研制与集成。
1 激光雷达回波信号模拟原理
激光雷达的目标回波信息表征了目标的四维信息,包括三维空间结构信息和一维激光能量散射信息。三维空间结构信息可分解为一维距离信息和二维角-角空间信息。一维距离信息可进一步分解为弹目距离信息和目标深度信息。
将上述激光雷达回波信息映射为功能相互独立的功能模块。如图1所示,弹目距离模拟延时器用于模拟弹目距离信息,能量信息模拟单元(包含脉冲激光源和衰减器)用于模拟回波激光脉冲的能量维度信息,目标深度信息模拟单元模拟目标的深度信息,目标角-角空间信息模拟单元用于模拟对应深度切片的角-角空间切片图像。最后光学信号通过光学投影镜头与激光雷达导引头接收机进行适配。

图1 激光雷达目标回波信息等效映射Fig.1 Equivalent mapping of LiDAR imaging target return signal
进一步将各功能模块分解,通过电延时方式实现弹目距离模拟延时器,可以模拟较大的延时范围,同时通过双通道的方式补偿系统误差。双通道粗控模拟延时器经过时间t0给激光雷达成像导引头触发信号作为tstart,同时根据模型解算弹目距离延时相应时间t,输出TTL触发脉冲给脉冲激光源。脉冲激光源接收到电触发信号后,输出激光脉冲,激光脉冲经过衰减器按照模型解算值进行衰减,空间激光通过光纤耦合器耦合进入光纤,由此进入目标深度信息模拟单元。光信号从自由空间转入光纤内传播,通过分束器分为N路光信号,每路信号的延时可通过光纤延时线精控实现,且每路可模拟出目标的深度信息。N路光信号做成阵列,分别经过照明微透镜阵列准直后照明DMD(微快门阵列)不同区域,不同区域预先设置模型,解算软件生成的图像切片(目标角-角空间信息),经过聚焦透镜进行N路图像的复合。最后由光学投影镜头与导引头的接收机光学系统匹配,激光雷达接收机接收到各像素的tend信号。
由于系统具有固有延时,即使将激光雷达目标回波模拟器的延时量置为“0”,接收机接收到的激光脉冲仍存在“微秒”量级的系统固有延时,导致最近模拟距离即盲距达几百米,不利于飞行轨迹末端的模拟。此外,图像复合模块中各个微透镜阵列实际加工位置与理论存在误差,该误差不可避免地受加工精度影响,无法保证各微透镜光轴与分割区域中心对准,导致DMD 各成像区域与相对应的微透镜阵列不同轴,图像的空间复合精度低。因此,为实现高精度激光雷达成像目标回波信号的模拟,必须提高模拟器的时空匹配性,补偿仿真系统固有延时误差以及空间对准误差。
2 激光雷达回波信号时空匹配方法
目标回波信号的角-角空间信息采用基于微快门阵列区域分割的方法模拟,如图2所示,通过将大规模微快门阵列区域分割并保证每个分割区域成像的空间对准,同时对与分割区域相对应的通道在时间维进行“切片”并精确延时,实现图像序列在时间维与空间维的生成。

图2 激光雷达成像目标回波信息模拟原理Fig.2 Principle of return signal simulation for LiDAR imaging target
2.1 时间匹配方法
时间控制采用粗控与精控延时相结合、双通道系统差分补偿的方案,粗控延时模拟弹目距离,决定了目标模拟器的延时范围,精控延时用于模拟目标沿视线方向的纵深。
粗控电延时采用双通道系统差分补偿的方法,如图3所示,电延时模块采用双通道延时控制,能够通过通信接口接收来自上位机对2 个通道的延时时间量Δt1和Δt2,通过接口I1和I2响应来自激光雷达发射机的触发信号,2 个通道分别按照延时量进行延时Δt1和Δt2 后,通道1 的信号经O1输出给目标模拟器的激光器,通道2的信号经O2输出给激光雷达接收机。
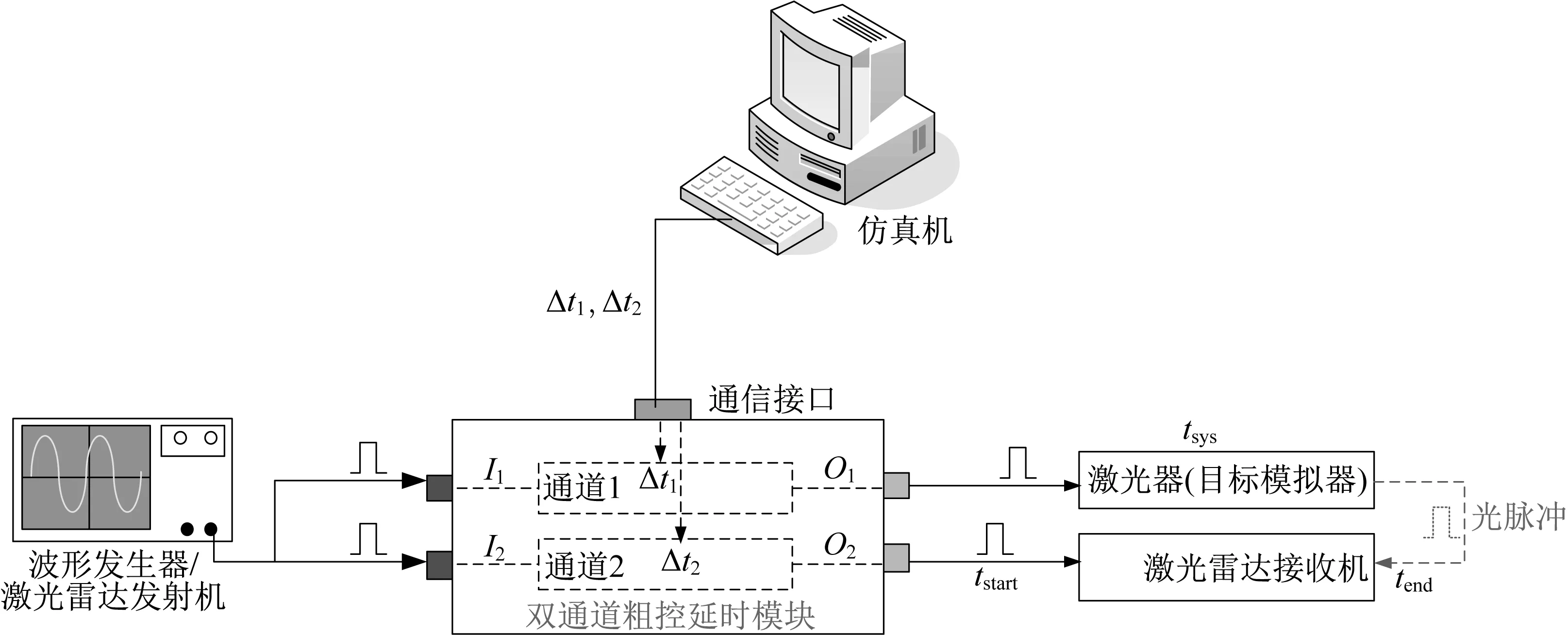
图3 双通道延时差分补偿原理Fig.3 Principle of dual channel delay differential compensation
双通道延时差分方法针对激光雷达接收机可接收外部计时开始信号(tstart),即激光雷达接收机与发射机之间相对独立。实际进行半实物仿真时,为了防止发射机的大能量激光脉冲损伤目标模拟设备,激光雷达发射机不工作或不发光只输出电触发信号tstart。当激光雷达发射机不工作时,可以用标准波形发生器代替,与激光雷达发射机输出电触发信号tstart是等价的。电延时模块具备2 个通道延时控制功能,能够通过通信接口接收来自仿真机对应2 个通道的延时时间量Δt1和Δt2,通过接口I1和I2响应来自激光雷达发射机或波形发生器的触发信号,2 个通道分别按照延时量进行延时Δt1和Δt2后,通道1 的信号经O1输出给目标模拟器的激光器,通道2 的信号经O2输出给激光雷达接收机作为tstart。目标模拟器经过系统固有延时tsys后,光信号被激光雷达接收机接收并触发tend。当Δt1=Δt,Δt2=tsys时,雷达接收机实际测得的延时是Δtr=tsys+Δt1-Δt2=Δ。其中Δt是所要模拟的距离延时。因此,双通道延时方案能够有效补偿目标模拟系统的延时。
精控延时采用光纤延时方法。N个通道的时间间隔即时间(距离)分辨率决定了可模拟目标的距离维尺度。例如10 个通道,时间分辨率为1 m,则可以模拟的目标深度为10 m,在通道数不变的条件下,如果时间分辨率进一步增加则可模拟的目标深度将减小。
2.2 空间匹配方法
目标回波信号的空间匹配主要包括DMD 成像区域与光轴的精密对准、模拟器与被试激光雷达光学系统的匹配。
2.2.1 成像区域与光轴精密对准
回波断层图像生成原理如图4所示,照明微透镜阵列发出的平行光照明DMD对应的分割区域。DMD按照分割区域对入射光进行调制,输出调制光信号,每个投影微透镜阵列中的微透镜将对应分割区域调制的光信号准直。投影微透镜输出的平行光由复合镜头复合于光阑处并从投影镜头平行出射。光源阵列与准直微透镜阵列距离是微透镜的焦距f1。光源阵列中的每个光源均位于准直微透镜阵列中对应微透镜的焦点上。复合微透镜阵列与DMD 的距离是微透镜的焦距f2。复合微透镜阵列输出的平行光由复合镜头进行复合,并在距离复合镜头的焦距f3位置放置光阑。光阑与投影镜头的距离是透镜镜头的焦距f4,且光阑位于投影镜头的焦面上。

图4 基于快门阵列区域分割的激光雷达回波断层图像生成原理Fig.4 LiDAR imaging target return signal tomography image generation based on shutter array region segmentation
对DMD 的1024×768 像素按照256×256 进行区域4×3 分割,获得二维分割区域布局,如图5所示。将目标的第三维信息进行图像切片处理,并根据分割区域排序后驱动DMD。对应的光源阵列同样由4×3 个光源组成,发射的特征光含有距离维度信息。被照明微透镜阵列准直成平行光,照亮对应的圆形区域。为了保证中间64×64 的分辨率,该圆形区域的直径应当大于64×64,同时为了避免串扰,该圆形区域的直径应当小于256×256。同时调制器按照预置的64×64 调制图案对入射光进行调制,生成一个64×64的图像切片。
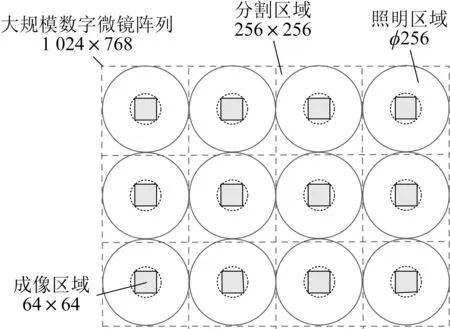
图5 DMD“切片”分区示意图Fig.5 Schematic diagram of DMD"slice"partition
每个图像切片就含有了特征光具备的一维信息。图像切片被对应的投影微透镜阵列准直。聚焦透镜将所有的图像切片进行复合,在光阑处生成一幅64×64×12 的三维信息图,投影镜头将该图进行投影给被测传感器,被测传感器就可以感知到该装置模拟目标的三维图像信息。
由于图像复合模块中各个微透镜阵列实际加工位置与理论存在误差,导致DMD 各成像区域与相对应的微透镜阵列不同轴,图像的空间复合精度低。为保证12 幅图像切片在光阑处可完全重合,DMD 各成像区域中心与相应的投影微透镜阵列光轴就必须完全重合。
但投影微透镜阵列存在加工误差,该误差不可避免地受加工精度影响,无法保证各微透镜光轴与分割区域中心对准,进而影响复合精度。但照明区域为直径为256 像素的圆形区域,大于64×64 成像区域,因此,可采用DMD 成像中心平移,成像区域仍位于照明区域内的方法进行补偿,补偿精度为像素级,如图6所示。
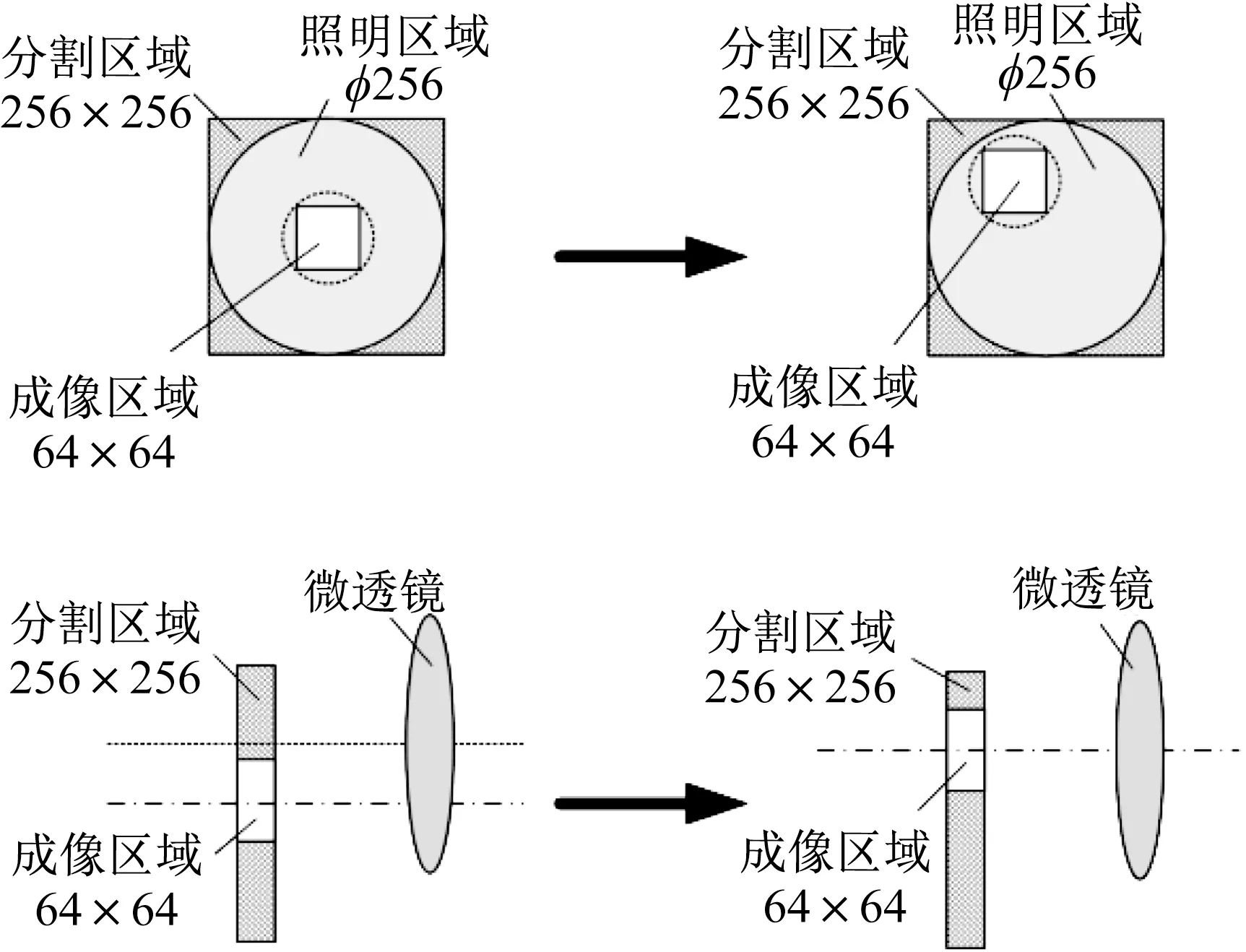
图6 DMD成像中心调整示意图Fig.6 Schematic diagram of DMD imaging center adjustment
2.2.2 光学系统匹配
光学系统匹配需要根据被试激光雷达光学系统及转台参数设计,假设投影光学系统视场为1.5°×1.5°,出瞳距离l为500 mm,出瞳直径dpupil为100 mm。由于光学系统旋转对称,因此,其视角所覆盖范围,应至少为方形视场1.5°×1.5°的外接圆,投影物镜视场应>2.121°,即半视场θ=±1.0605°。
据此可以估算出投影物镜透镜直径至少应为

式(1)中,Dprj为投影物镜透镜直径,l为出瞳距,θ为视场角,dpupil为出瞳直径。
根据以上公式可以求出,透镜有效通光孔径应为118.51 mm。中间像面图像覆盖范围为8.97 mm×8.97 mm的方形范围,即像面高度h=±6.342 mm。

据此可以计算投影镜头焦距为342.6 mm。
根据光学系统空间分辨率原理,光路最终需在8.97 mm×8.97 mm 范围内实现64×64 像素的分辨率,则光路光斑RMS半径应小于70微米,MTF@14.5lp应大于0.3。据此设计了如图7所示的投影物镜,实现光学系统匹配。

图7 光学系统设计Fig.7 Design of optical system
3 实验测试
在如图8所示的实验系统上进行了时间与空间匹配实验验证。
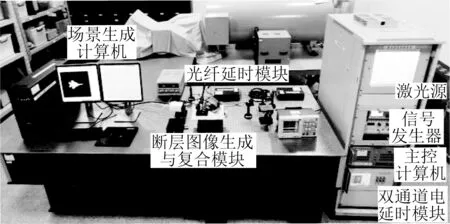
图8 激光雷达回波信号模拟实验系统Fig.8 LiDAR imaging target return signal simulation experiment system
3.1 时间匹配测试
设定通道1 和通道2 延时量均为0(即不进行系统延时误差补偿)时,使用示波器(型号为Tektronix TDS3012C,采样率100 MHz)测量系统的延时量,激光雷达接收机接收的tstart电信号(白色曲线)与通过激光回波模拟器接收到的tend光信号(灰色曲线)的时间差为907.8 ns,表明系统延时为907.8 ns,如图9(a)所示。通过给定通道2 延时量907.8 ns 进行系统延时对齐,调整后延时量如图9(b)所示,此时延时误差仅为755.5 ps。
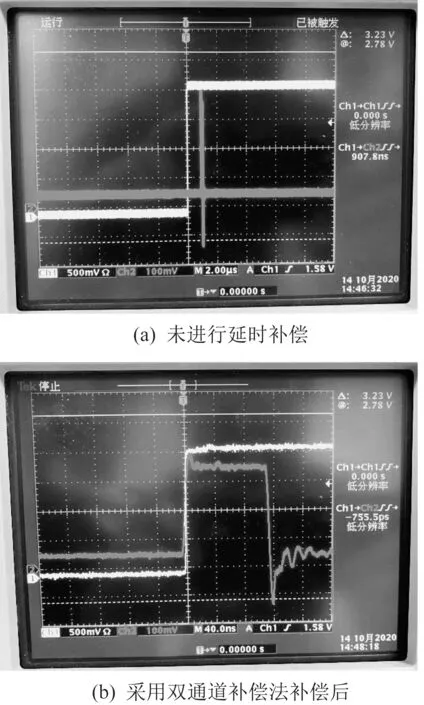
图9 时间匹配测试结果Fig.9 Results of time matching test
3.2 空间匹配测试
为测试系统的空间匹配效果,设计了“十字”测试图像,12 个分割区域均为完全相同的“十字”,DMD 模块载入该“十字”图像,并使用相机采集相应图像数据。若空间匹配则探测器中观测到12 个“十字”完全重合,若空间不匹配则不完全重合。
实验选用型号为DH-IPC-HF5221E、分辨率1920×1080 的相机。通过软件调整DMD 各分割区域的成像中心位置,使得各成像中心与各微透镜光轴重合,成像中心调整前的驱动图像及12 路切片图像复合成像效果如图10(a)所示,成像中心调整后的驱动图像及12路切片图像复合成像效果如图10(b)所示,调整后图像复合误差优于1个像素。
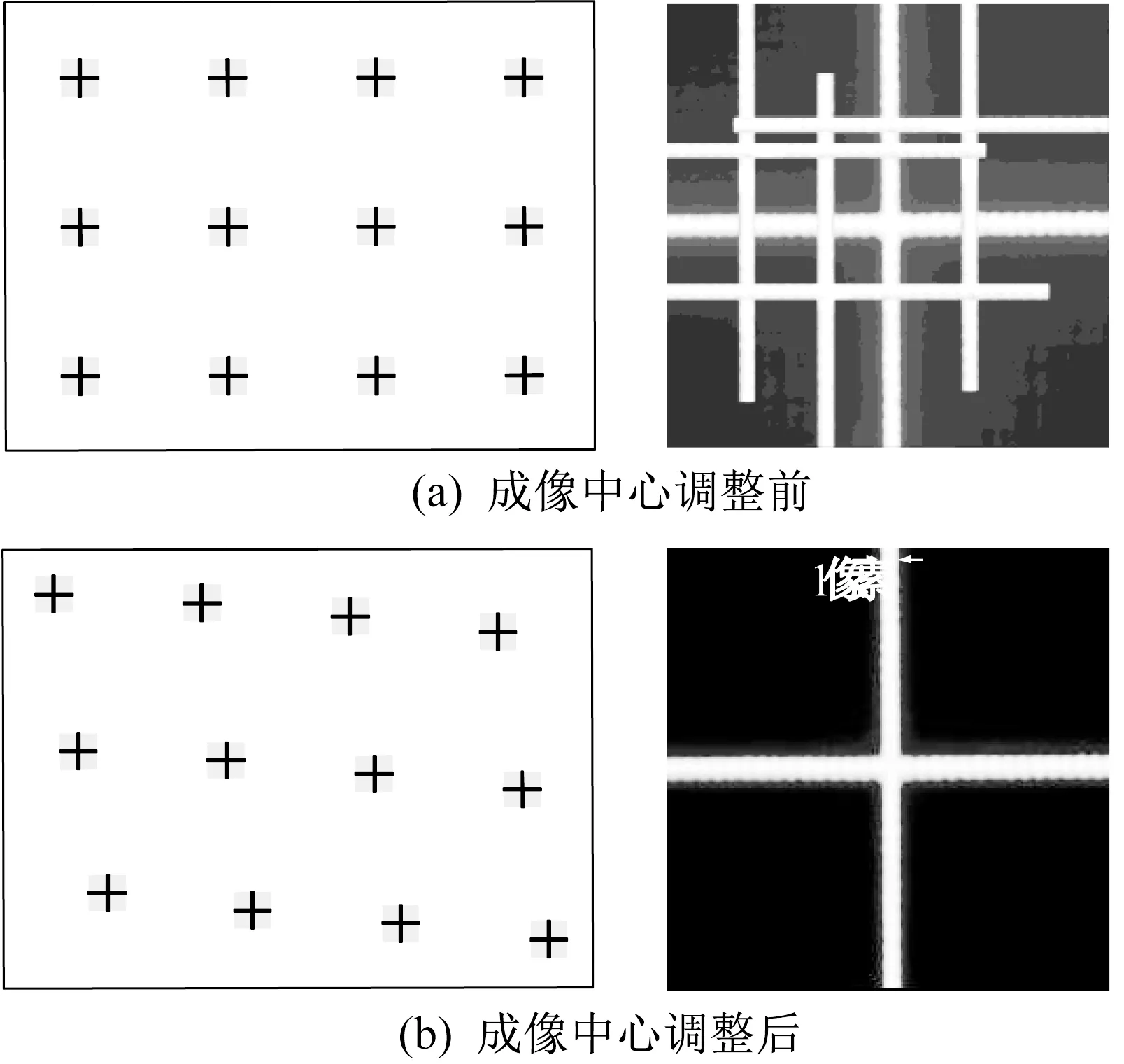
图10 空间匹配测试结果Fig.10 Results of spatial matching test
4 结 论
本文提出了一种激光雷达成像目标回波模拟系统的时空匹配方法。空间维通过光轴精密对准、光学系统匹配等方法实现目标回波模拟系统与激光雷达的空间配准。时间维采用粗控与精控延时分离、双通道系统差分补偿的方法,有效降低了系统复杂度,提高了系统的延时范围,提升了时间匹配精度。对本方法进行了试验验证,结果表明激光雷达成像目标回波信号的时空匹配精度明显提高,能够满足所提出的指标要求,可用于指导激光雷达回波目标模拟器的研制与集成。
