分数阶不确定复杂网络系统的自适应比例积分滑模同步
2023-01-15孟晓玲
孟晓玲
(郑州航空工业管理学院 数学学院,河南 郑州 450046)
复杂网络在现实生活中随处可见[1-4],如社会关系网、商业网、互联网、食物网等。许多重要学科的发展都是在研究这些复杂网络的基础上产生的,并在一定程度上改变了人类生活的方式。因此,对复杂网络的同步研究引起了众多学者的关注[5-8]。作为整数阶系统的补充,分数阶网络有没有这些好的性态,需要我们进一步深入探讨。 文献[9]利用自适应控制策略研究了具有复杂动态的分数阶网络同步;基于网络结构,文献[10]给出了带有未知系统参数的分数阶网络的一致性问题;文献[11]在驱动—响应的理论基础上给出了动态网络分数阶系统的自适应同步。 但由于复杂网络本身的特点,以及分数阶微分系统稳定性理论的不成熟性,还有很多未知的结论需要继续探索。本文在分数阶稳定性理论及矩阵理论的基础上,实现了该系统的自适应比例积分滑模同步,并用数值模拟说明了结论的合理性。
1 预备知识
定义1[12]连续函数x(t)的Caputo分数阶导数定义为
引理1[13]若x(t)为连续可微的向量函数,则有

引理2[14]假设x(t)=0是分数阶系统Dtαx(t)=f(t,x(t))的平衡点,若存在分数阶Lyapunon函数V(t,x(t))与K类函数γi(i=1,2,3)满足:
(1)γ1(‖x‖)≤V(t,x(t))≤γ2(‖x‖);
其中α∈(0,1),则该分数阶系统是渐近稳定的。

2 主要结果
考虑节点为N个的复杂网络系统(1):
(1)

以系统(1)为驱动系统,构造响应系统:

(2)
其中Δfi(y(t))为不确定项,di(t)为外扰动,ui(t)为控制器。定义误差ei(t)=yi(t)-xi(t),

(3)
选取终端滑模面:
(4)
其中λi>0(i=1,2,……,N),sgn(ei(t))=diag{sgn(ei1(t),sgn(ei2(t)),...,sgn(eiN(t)},
|ei(t)|=(|ei1(t)|,……,|eiN(t)|)T。

假设2 ‖Δfi(y(t))‖≤mi,‖di(t)‖≤ni其中Δfi(y(t))为不确定项,di(t)为外扰动,mi,ni为大于零的未知常数。
定理在假设1,2下,设计控制律为
(5)
自适应控制律为
(6)




(7)

由引理1得
(8)
这里

将上式代入(8)式,则有

由假设1和引理2知,系统(7)是渐稳的,即ei(t)→0,则在滑模面上,系统(1)与(2)是同步的。

将(5)式代入上式得

由引理3得,si→0⟹ei(t)→0,则系统(1)与(2)是自适应比例积分滑模同步的。
3 数值仿真
以3个节点的二阶网络系统为例进行数值仿真。
q=0.928,i=1,2,3。
定理中选取终端滑模面如下:
设计控制器、自适应控制律如下:
Δf1(φ(t))+d1(t)=-0.1cos(t)ω1+0.1cost,Δf2(φ(t))+d2(t)=0.1sin(t)z1+0.1cost,
Δf3(φ(t))+d3(t)=0.1sin(t)z1+0.1cost,
从图1中曲线变化可以看出,刚开始系统误差较大,但随着时间的变化,系统误差逐渐变小最终趋近于0,显然,系统达到同步了。
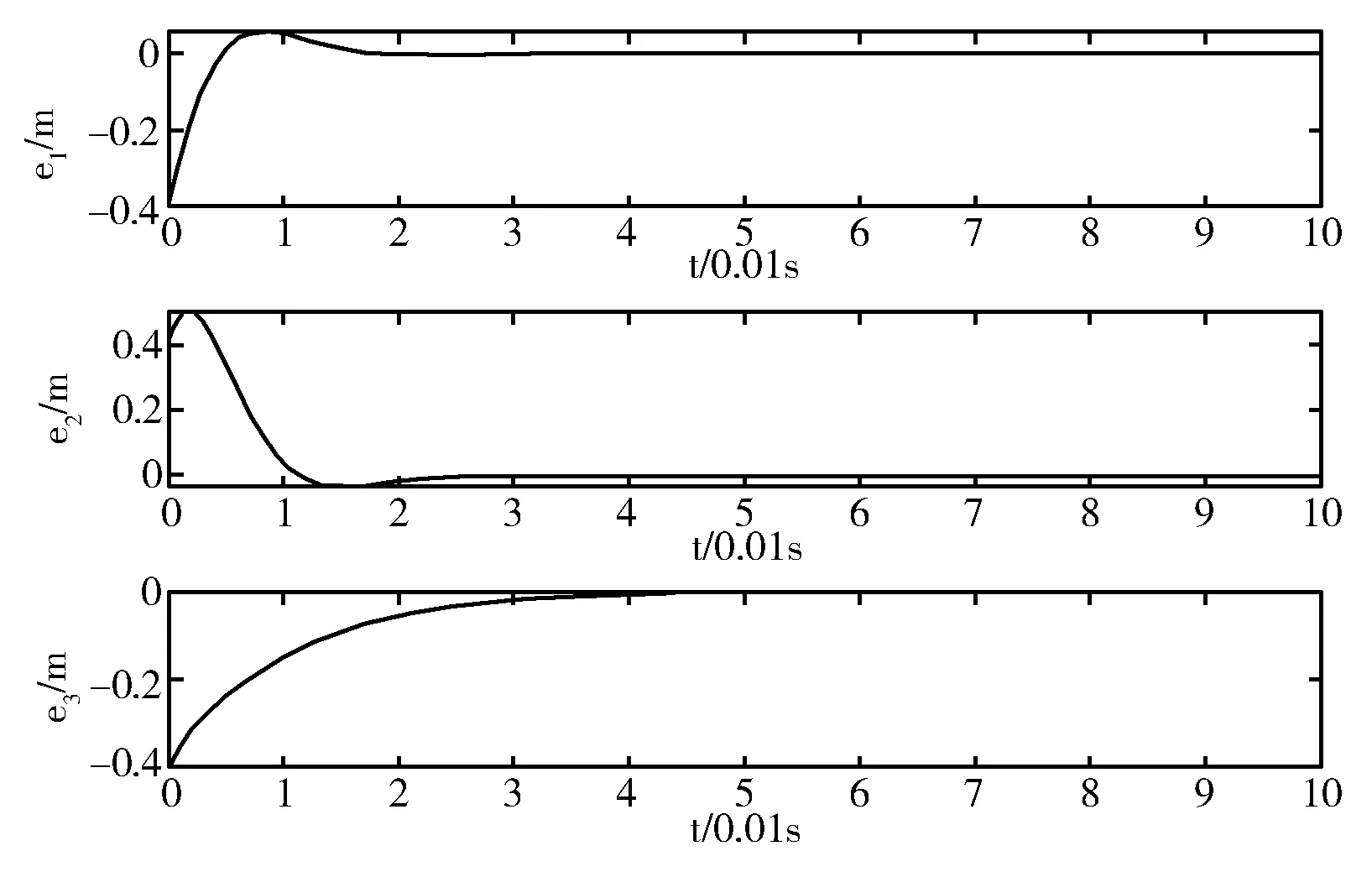
图1 定理的误差曲线
4 结 语
对数值模拟进行调试,由最终得到的图1可看出,随着时间的推移,在选取合理的控制器、控制律下,系统在一定时间内达到了同步,可见文中设计的控制器及未知参数是有效可行的。
因此,在分数阶稳定性理论的基础上,成功地设计了一种带积分的分数阶滑模面,实现了该系统的自适应比例积分滑模同步。
