智能仪表的双闭环控制系统研究
2023-01-14佘广逵
佘广逵
(扬州石化有限责任公司,江苏扬州 225200)
0 引言
随着智能仪表的广泛普及,微电子、网络信息、电力电子和自动化控制等技术逐渐应用于仪表控制,使智能仪表更加智能化、集成化、自动化、人性化和多功能化。因此,对智能仪表控制的研究就显得尤为重要。为此,本文提出一种双闭环控制系统,并围绕双闭环控制系统的数学模型、时域分析、对仪表精度和稳定度的影响等方面展开分析阐述,目的是为该领域研究启发新思路,提供新方法。
1 双闭环控制系统数学模型
1.1 双闭环控制系统结构
双闭环控制系统包括模拟内环和数字外环两部分,既能保证仪表精度和稳定性,也能对输出进行快速调控(图1)。其中,模拟内环是利用PI 控制器处理信号来控制被控对象,并引入负反馈环节,保障仪表精度和稳定性,为缩短调控时间,添加数字外环部分,对仪表输出值进行采样,得到误差和误差变化率,然后采用模糊控制策略修正输入设定值,使得输入偏差为零,输出稳定,实现快速调控。

图1 双闭环控制系统结构
1.2 辨识理论
辨识是指分析测试系统的各项参数和动态特性,按照等价原则,从待选模型组中挑选出最贴合实际需要的一个模型的过程。该过程通常包含4 个环节:
(1)实验设计:包括选取输入信号、选择采样周期、在线辨识等步骤,使输入输出信号最大程度反映系统特征。
(2)模型结构辨识:确定差分和状态方程模型结构的模型阶次和Kronecker 不变量,常用方法有AIC 法、Hankel 矩阵判秩法和行列式比法等。
(3)模型参数辨识:估算模型参数数值,常用方法有Bayes法、极大似然法和最小二乘法等。
(4)模型检验:需从多方面进行模型检验,如满足不同时刻模型特性基本一致、损失函数变化不大、数据长度增加但损失函数变化不大、残差序列为白噪声序列等情形,均可认为模型可靠。
1.3 模拟内环和数字外环控制系统
根据辨识理论,要求得整个双闭环控制系统的数学模型,需求得模拟内环传递函数和数字外环模糊控制器。其中,模拟内环传递函数由PI 控制器和效应管传递函数共同决定,而PI 控制器和效应管传递函数分别为:

由式(1)、式(2)整理可得,模拟内环传递函数为:

令电压为Ui,采样电压为U0,则误差和误差变化率分别为:

将误差和误差变化率作为输入,DA 修正值ΔU 作为输出,得到数字外环模糊控制器结构(图2)。

图2 数字外环控制系统模糊控制器结构
基于模糊控制器结构,需进行模糊处理,将精确量转换为模糊变量。设置输入模糊论域为[-100,100],输出模糊论域为[-10,10],模糊语言为{负大,负中,负小,零,正小,正中,正大},对应英文为{NB,NM,NS,Z,PS,PM,PB}。同时,设置模糊控制规则如下:
(1)if e=NB AND ec=NB then ΔU=NB
(2)if e=NB AND ec=NM then ΔU=NB
(3)if e=NB AND ec=NB then ΔU=NM
在满足模糊控制规则条件下,采用CRI 方法的Fuzzy 和Mamdani 模糊推理算法。将A 到B 转换为X 到Y 的模糊关系R:

对A 与R 进行合成运算得到B:

若模糊蕴涵取Mamdani 蕴涵,则可推得:

经模糊处理后得到模糊集合,再进行反模糊处理,得到精确值,采用面积重心法,隶属函数与横轴所围图形重心为:

若量化级数为m,则重心为:

根据上述模拟内环与数字外环控制系统的数学模型,利用MATLAB 软件,得到双闭环控制系统的数学模型(图3)。

图3 双闭环控制系统数学模型
2 双闭环控制系统时域分析
针对双闭环控制系统数学模型进行时域分析,研究系统输出和状态对时间的响应特性,该线性定常系统微分方程如下:

式中,r(t)是系统输入,c(t)是系统输出信号。
系统响应包括暂态响应和稳态响应,从两方面分析对比双闭环和单闭环控制系统的控制性能。
2.1 暂态响应分析
由拉普拉斯变换求解微分方程得:


系统单位阶跃响应(r(t)=1(t))和单位脉冲响应(r(t)=δ(t))为:
利用MATLAB 求得双闭环和单闭环控制系统暂态响应曲线。根据曲线计算暂态响应指标数值如下:
最大超调量:Mp单=16.9%;Mp双=0.6%。
峰值时间:tp单=0.34 s;tp双=0.345 s。
上升时间:tr单=0.22 s;tr双=0.315 s。
调整时间:ts单=1.67 s;ts双=0.62 s。
2.2 稳态响应分析
由计算可得,单位阶跃函数1(t)的扰动误差为0,单位斜波函数t 的扰动误差为-0.799,单位抛物线函数的扰动误差随时间增大而增大,趋于无穷。
综上,苛刻的单位阶跃输入下系统满足要求,其他函数输入均满足要求。相对于单闭环控制系统,双闭环控制系统相对稳定性更好、抗干扰能力更强、响应时间更长(在允许范围内),故采用双闭环控制系统更合理。
3 双闭环控制系统对仪表精度的影响
仪表精度用于表征测量结果和真值的接近程度,常见等级有0.01,0.02,(0.03),0.05,0.1,0.2,(0.25),(0.3),(0.4),0.5,1.0等(括号等级不推荐使用)。工程中常用引用误差Y 衡量,即绝对误差Δ与量程值之比:

为方便使用,引入最大引用误差Ymax,即仪表全量程示值绝对误差绝对值最大值Δmax与满量程值之比:

取不同位数(分辨率不同)的ADC(模/数转换器)和DAC(数/模转换器)测试,求得最大引用误差如表1 所示。
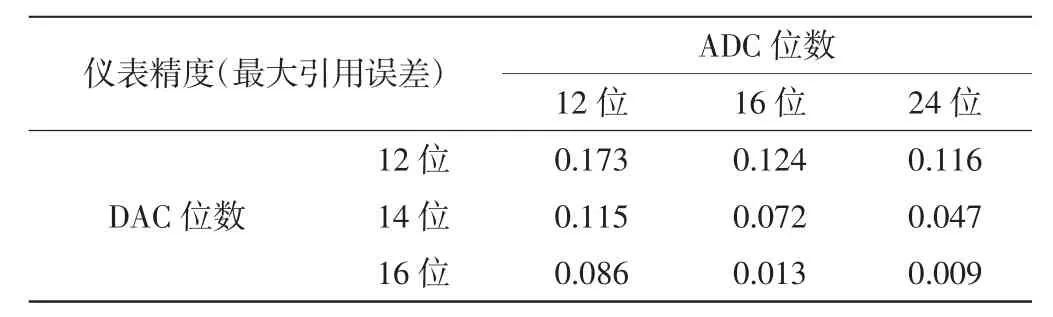
表1 仪表最大引用误差 %
由表1 可知,ADC 和DAC 的分辨率共同决定仪表最大引用误差,需选择合适的ADC 和DAC 位数,才能满足仪表精度要求。
4 双闭环控制系统对仪表稳定度的影响
仪表稳定度常用短期稳定度指标S 表征,即输出电压最大变化量(含波动和漂移),常用测量方法有参考标准和零值检测器2 种,可用式(18)计算:

其中,Umax为输出最大值,Umin为输出最小值,U0为被测点电压值。
经测算,短期稳定度大小随采样周期的增大,呈现出先减小、后趋于稳定、再增大的变化趋势。分析其原因,是因为随着采样周期减小,控制频率增大,系统抗干扰能力增强,稳定度提高;当采样周期减小到一定程度,受限于转换器转换速度等因素,输出修正值会滞后于采样信号,使稳定度下降。
5 结束语
综上所述,通过归纳总结双闭环控制系统的结构和特征,利用辨识理论和模糊控制等方法,推导出模拟内环和数字外环的数学模型,建立双闭环控制系统数学模型。借助MATLAB 对双闭环控制系统的暂态响应和稳态响应进行时域分析,对比单闭环控制系统,分析双闭环控制系统的控制性能,应用理论计算和数据分析,探究双闭环控制系统对仪表精度和稳定度的影响,为双闭环控制系统设计提供理论依据,促进智能仪表控制的进一步完善。
