人车碰撞事故中人地碰撞损伤防护综述
2023-01-12邹铁方教授赵云龙
邹铁方教授 赵云龙
(长沙理工大学 汽车与机械工程学院, 湖南 长沙 410114)
0 引言
我国道路交通事故中行人死亡人数占事故总死亡人数的25%[1],可见行人作为弱势交通参与者,极易在事故中受到致命伤害。目前的交通系统越来越智能、自主[2],就要求“聪明的车”能更科学、全面地保护行人。车辆智能化被视为提升行人安全的有效途径之一,人们期待通过智能化车辆实现零事故愿景,但行人的行为具有随机、不确定等属性,导致人车冲突预测困难,不能完全避免人车碰撞事故。大量关于行人自动紧急制动系统(Automatic Emergency Braking, AEB)的研究支持该观点,例如,ROSÉN等[3]发现AEB能减少40%的行人死亡率和27%的行人受伤率,但不能完全避免碰撞;HAUS等[4]发现AEB可将目标人群的死亡风险降低84%~87%、伤害风险降低83%~87%,但仍有31%~44%的事故不能避免;刘福聚等[5]发现AEB可以避免57.5%的重伤及死亡事故,但仍有41.6%的事故不能避免。
在智能车量产过程中,安全是最核心的因素,但已从追求“零事故”过渡到“比人安全”,对不同等级智能车的要求及安全期待逐步回归理性。但相关研发并不需要降低安全要求,零损失、零伤亡、零事故仍应该是学者们追求的目标。根据目前车辆智能化水平,人车碰撞虽不能完全避免,但智能车必将降低碰撞车速,如文献[6]所述,正常情况下车速将降至中低速(≤40km/h)。在车辆智能化道路上,如何进一步提升中低速潜在碰撞事故的避免率并更好地保护未能避免的事故中的人体损伤均亟需关注,本研究将就此展开讨论。
1 人车碰撞事故数据启示
交通事故在揭示交通安全规律、改善汽车安全设计等方面均极具价值,但由于事故在调查前已丢失若干重要信息,严重影响事故调查的结果。事故再现就成为补足缺失信息的有效手段。事故再现是指根据事故现场采集的各类痕迹并参考证人证言重建整个事故发生过程的一种手段[7]。通过长期的研究积累,已有很多再现方法可用,如经验公式[8-9]、仿真软件[10-12]、实车测试、视频图像[13-14]及车载记录工具[15]等。但事故现场痕迹受天气及行人的影响导致痕迹不确定,不准甚至测不到。为了将痕迹的不确定性反映到事故再现结果中以增强再现结果的客观性,学者们提出了不确定度评定法[16]、蒙特卡洛法[17]、贝叶斯法[18]、随机摄动法[19]、上下界法及响应面法[20-21]等计算不确定性的分析方法,这些方法虽能保证再现结果的客观性,但没从本质上提升结果精度。为使结果更可靠,事故再现人员通常会运用多种模型再现同一事故,进而获得多个事故再现结果,那么如何融合这些结果成为一个棘手的问题。学者们通过引入证据理论[22]、有序加权平均算子(Ordered Weighted Averaging,OWA)、组合加权算术平均算子(Combined Weighted Arithmetic Averaging,CWAA)[23]及蒙特卡罗法与子区间技术[24]等提出了多种多模型事故再现结果融合方法,这些方法可高效融合多个不确定事故再现结果,进一步提升所得结果的客观性、可信度。高可信事故再现方法有效地保证了所得数据及后续数据挖掘结论的客观性。
基于事故数据,刘期[25]发现,车速在<25km/h时头部和大腿损伤主要来自于地面撞击,而在车速≥25km/h时则主要来自于车辆撞击;胸部损伤来源较为复杂,若从胸部最大碰撞力所导致的损伤这一层面进行分析,人体胸部的损伤主要来源于地面撞击;若从胸部最大加速度所导致的损伤这一层面进行分析,人体胸部的损伤主要来源于车辆撞击;臀部损伤在中低速(≤40km/h)时主要来源于地面撞击,这些发现均表明人地碰撞损伤不宜忽略。在人车碰撞中,行人与车辆发生第一次碰撞产生人车碰撞损伤,与地面发生二次碰撞产生人地碰撞损伤。一般认为,人车碰撞会导致大部分行人损伤,因而有观点认为人地碰撞损伤无需防护,但事实并非如此,较低的地面所致伤害极可能是人地碰撞模型不确定所致。已有研究大多基于Madymo软件,但Madymo中人地碰撞模型并未得到充分验证[26-29],SHANG等[30]通过再现尸体实验指出Madymo中人地碰撞模型并不可靠,这可能是导致一些研究中的人车碰撞损伤显著大于人地碰撞损伤结论的原因[31],正如另一些研究中获得人地碰撞损伤达到人车碰撞损伤的20倍[32]。尸体实验[30]显示在20~30km/h速度范围内地面所致人体头部伤害风险比车辆所致的风险更高,4组数据完整的实验中车辆所致头部损伤准则(Head Injury Criterion, HIC)分别为152、192、202及249,但与之对应的地面所致HIC则达到557、941、256及607。除此以外,大量研究均表明行人与地面碰撞损伤占比很大[33-37]。NEAL-STURGESS等[33]通过逐个案例分析发现人与地二次碰撞中对行人的伤害也很严重;GUILLAUME等[36]基于法国的100例事故分析指出当碰撞车速低于30km/h时,依据简明损伤定级法(Abbreviated Injury Scale,AIS)超过50%的AIS2+(指中度损伤以上)伤害是由地面撞击造成;SHANG等[37]通过分析1 221起德国行人碰撞案例发现,在碰撞车速低于40km/h时如能避免地面相关损伤,可降低2/3总伤害成本。综上,人车事故中地面所致人体损伤不能忽视,在中低速时更是如此。智能车辆仍没有避免的事故极可能是中低车速下的碰撞,此类碰撞中人体受到来自车辆的致命伤害风险不高,防护难度相对高速碰撞而言更容易,故研究智能车中低速时的人体保护技术极为必要、极具价值。
基于事故数据,ZOU等[38]采用文献[39]中的方法预估视频中车辆与行人的速度,并用文献[10]中的方法仿真事故,再现150例人车事故视频,发现3种行人步态序列,即跑步序列(62例,41.3%),行走序列(37例,24.7%),应急序列(51例,34%)。其中,跑步和行走2种步态序列之间的行人高度有显著差异。不同行人步态序列中的头部、颈部、躯干、骨盆、左上臂、左下臂、左股骨、左小腿、右上臂、右下臂、右股骨、右小腿12个身体部位在X-Z平面的角度不同,但四肢角度在统计学上具有相似性。同一步态序列中,碰撞前的行人速度和碰撞瞬间的行人速度有显著差异,表明行人在危险时刻拥有极强的速度改变能力(即瞬间加速或减速)。进一步分析发现,在48例行人做出躲避动作的碰撞中,行人的减速度呈正态分布,范围在[0.1, 8.2]m/s2之间,中值为4.2m/s2。 无独有偶,清华大学LI Q等[40]基于虚拟现实实验平台,使受试者(“行人”)在控制良好的近真实交通冲突场景中表现出自然回避行为,并使用动作捕捉系统和生理信号系统记录行人躲避反应的动力学和运动学特征。结果发现,行人在躲避行为中的速度与正常步态中的速度有显著差异(p<0.01)。进一步分析发现[41],在虚拟交通场景中,70%的行人通过调整行走速度和方向成功避免了碰撞。其中,33%的行人通过向后减速成功避免事故,平均减速度为2.4m/s2;23%的行人通过向前加速成功避免碰撞,平均加速度值为7.4m/s2。这些研究均表明行人在潜在碰撞中具有很强的主动避撞能力。
2 人地碰撞损伤主动防护
事故数据和实验均显示,行人具有很强的主动避撞能力,在设计AEB过程中充分利用这一点,可进一步提升AEB系统的事故避免率。邹铁方[42]提出一种具有主动式被动安全功能的行人自动紧急制动系统(Autonomous Emergency Braking System-Pedestrian,AEB-P),其包括感知系统、计算中心、人机交互系统、碰撞前制动系统及碰撞后制动控制系统。感知系统负责感知车外环境并实时监控事故中人体的运动响应;计算中心负责根据感知信息做出决策进而指导其他系统工作;人机交互系统由安装于车顶的声光警示灯组成并负责警示行人;碰撞前制动系统依据计算中心指令制动车辆以避免事故及降低碰撞车速;碰撞后制动控制系统依据计算中心指令控制车辆制动以降低人地碰撞损伤。当监测到人车碰撞不可避免时,人机交互系统通过车顶声光警示灯警示行人、通过碰撞前制动系统完全制动车辆,以实现提升事故避免率并降低碰撞车速的目的。
ZOU等[43]建立了一种考虑行人减速度的车辆制动控制方法。该方法通过探测角度、探测距离、横向触发距离组成一个预警区域,将行人视为一个半径为0.5m的圆柱体;当行人进入预警区域后完全制动车辆,如行人位于警示线之外、横向触发距离之内则会被警示;警示线是由行人警示触发距离确定的虚拟线,行人警示触发距离由垂直车辆边缘向外的长度定义。选取124例车辆直行撞击与行车方向垂直行走行人的事故视频通过再现获得人车在碰撞前1s的相对位置,同时考虑遮挡等因素重新调整人车相对位置,构成一个真实案例评价系统。通过蒙特卡洛优化获得车辆制动控制方法中7个输入参数的最优组合,分别是探测角度60°、最小探测距离25m、横向触发距离3.5m、行人警示触发距离0m、滞后时间0s、行人减速度8m/s2及行人反应时间0s。结果显示, AEB-P应用该最优组合的避撞率(Rate of Collision Avoidance, RCA)高达84.68%。基于最优输入参数组合,采用单因素分析法分别讨论各参数对RCA的影响:当行人减速度从0增加到4m/s2时,RCA增加约10%;当滞后时间达到0.2s,行人减速度为0m/s2时,RCA下降到62.9%;当行人警示触发距离为0m时,RCA达到最大值;当检测角度大于60°、横向触发距离达3m或最小探测距离大于15m时,RCA不再显著变化;随着行人反应时间的增加,RCA逐渐降低,当行人反应时间达0.6s时将消除行人紧急避撞所带来的益处即RCA降到最低。
上述研究表明,在AEB系统中考虑行人避撞能力会带来潜在好处,正常情况下可以提升事故避免率10%,但行人反应时间会显著影响这种潜在益处。参考相关研究[40],取实验均值,行人与车辆中心线距离2.2m时需要1.6s才能通过向后撤退的方式避免碰撞,而当行人距离车辆中心线距离1.2m时候需要1.8s才能通过向前奔跑而避免碰撞,说明行人反应时间在此类AEB研发中需重点关注。ZOU等[43]的研究中假设行人进入预警区内才开始警示即车辆意识到事故不可避免时才警示行人,但在危险区和安全区之间还有很大的灰色区即潜在风险区,意味着潜在风险区内如何实现行人与车辆的有效交互,非常值得探索且极具价值,无论实验还是真实事故均表明行人可以通过自己的躲避行为有效提升事故避免率[41, 43]。
3 人地碰撞损伤主动式被动保护
现有AEB系统主要通过控制车辆制动和转向避免碰撞,类似方法再结合警示行人的方案,但一直未达到100%的事故避免率,这表明依然亟需研究行人被动保护。AEB既然能控制碰撞前车辆的运动,其自然可以控制碰撞后车辆的运动,以让移动的车辆影响人体落地姿态进而减轻人地碰撞损伤。ZOU等[44]于2019年提出一种碰撞后的车辆制动策略,如图1碰撞后车辆制动控制减速度(0.75gm/s2)曲线所示,当汽车检测到事故不可避免时,采用完全制动车辆以降低碰撞车速,在人车碰撞发生的t0时刻车辆的减速度已达最大;以头与车碰撞时刻为t1,t1时刻车辆开始松开制动以追上抛出的人体进而影响人体运动学响应;考虑制动系统协调时间0.2s后制动完全松开,然后车辆开始无制动向前运动到t2,考虑制动系统协调时间0.2s后完全制动直至车辆静止。

图1 碰撞后车辆制动控制减速度曲线Fig.1 The deceleration curve of the vehicle braking control after the collision
研究显示[44-46],图1所述控制制动方法可大幅减少行人头部和盆骨与地面的碰撞损伤,在最优车型使用控制制动方法(小轿车)人地碰撞加权伤害费用总和(Weighted Injury Cost, WIC)最高降幅达97.4%,HIC最高降幅达88.7%。这表明通过控制制动降低人地碰撞损伤的策略可行[46]。同时为探究制动控制在降低人地碰撞损伤方面的潜在效益及其约束,邹铁方等[11]仿真再现了139例真实的人车碰撞事故并加以控制制动,结果显示:在真实碰撞中事故车辆完全制动与否不会对人体损伤造成显著影响;通过制动控制能够显著降低头、臀与地面碰撞所致损伤,并能降低头与车、头与地碰撞位置的重合率,也不会加重车辆所致损伤; 91.6%的案例在现实中有足够空间实施制动控制,但要求车辆在较短时间内做出判断并正确控制车辆。
但是,相关研究均未能给出车辆再次制动时间t2的可行方案。为此,邹铁方等[31]提出了3条车辆再次制动规则,即当监测到人体下肢、主要部位(头、胸及臀)超出车体两侧;人体臀部超过车辆前挡风玻璃下沿或人体双脚高度超过头部高度;人体头、臀部高度低于发动机罩盖前沿高度。通过480次仿真试验证明该方法能降低地面所致损伤但不会加重车辆所致损伤,且能将83.75%案例中车辆与人体主要部位首次触地点位置之间的距离缩短至1m内。这为安装其他车载装备以更好地保护行人提供可能。为此,邹铁方等[47]提出的通过在车辆前端安装与车同宽、长1.5m、高30cm的气囊并结合控制制动,在未优化前提下成功将WIC、HIC分别降低91.9%和87.7%。
上述研究表明,通过AEB控制碰撞后的车辆运动,具有降低人地碰撞损伤的巨大潜力,且为其他车载设备更好地保护行人提供了可能。但现有研究,在理论上未能全面揭示基于制动控制的人地碰撞损伤防护极限及人地碰撞损伤降低的原因;在实践中,对车载监测和计算设备要求过高,实践潜力不足;未充分考虑错综复杂、快速变化的事故情况,即各类参数扰动下所述方法的鲁棒性问题。这些均需在后续研究中深入探索。
4 引擎盖形状对人地碰撞损伤的影响
图1给出的车辆制动控制策略,t1前完全制动车辆的目的在于降低车速以降低人体头部与车体的撞击速度进而降低头部损伤;人与车撞击后人体被抛出,一般认为此时人体与车体具有相同的运动速度,此时松开车辆制动不会导致严重的人车再碰撞,现有的多数研究中并未观察到这样的现象,这也是人车碰撞损伤增加的主要原因;通过t1到t2时段的人车相互作用,最终改变人体落地姿态从而减轻人地碰撞损伤。在人车相互作用过程中,引擎盖为关键部位,但并未见其形状对人地碰撞损伤防护效果影响的成果。为此,本部分将就此展开讨论。
4.1 仿真实验设计
仿真试验中车型选取轿车和SUV 2种,每种车型均选用完全制动与控制制动2种制动控制策略,并结合成熟的虚拟仿真系统[29,31,44,47]设计试验。完全制动指人车碰撞全过程中车辆一直完全制动,最大制动减速度为0.75gm/s2。控制制动则是依据图1所示的制动控制策略控制车辆运动。
参考文献[48-49]的研究成果,试验中以8个车头外形参数来定义车头形状(如图2),相关参数的具体数值均来自对大众捷达(轿车)和大众探岳(SUV)的实车测量(见表1)。基于此,在多刚体仿真平台Madymo中建立轿车和SUV车型的多刚体模型,实际车头外形与仿真建模的车头外形对比,如图3。其中,车头各部件的接触刚度与文献[49]中的刚度一致。

图2 车头外形尺寸参数Fig.2 Dimensions of the front of the vehicle
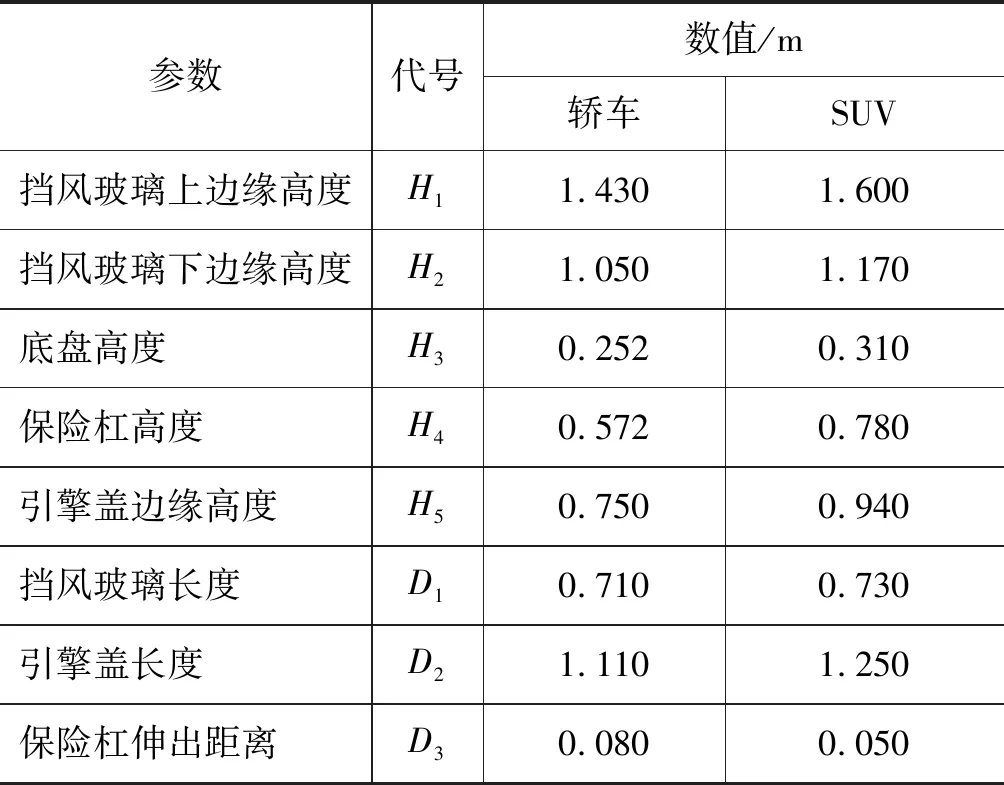
表1 车头形状参数具体数值Tab.1 The specific parameter value of the headstock

图3 轿车与SUV的仿真车头外形与真实车头外形对比Fig.3 The comparison between the simulation headstock shape and the real headstock shape of the car and SUV
将轿车、SUV原有已建立好的引擎盖称之为中平引擎盖,之后将原有轿车、SUV模型的引擎盖等分为左右2个部分,据此设计出2种新型引擎盖形状(左右部分同时向上倾斜0.1rad、左右部分同时向下倾斜0.1rad),分别称之为外形呈中凹、中凸的2种引擎盖。3种引擎盖的车头除引擎盖形状变化外其余各参数均与表1一致,轿车3种引擎盖示意图,如图4。

图4 轿车的3种引擎盖形状Fig.4 The three hood shapes of a car
数据显示碰撞车速低于41km/h的人车碰撞占比极高(80%左右)[29,36],并参考已有研究[31,44,47],本研究采用3种车速(21、31、41km/h)、4种行人模型(与已有研究相同,行人大小尺寸为5百分位女性、5百分位男性、50百分位男性、90百分位男性)、2种行人步态(50%行人步态、100%行人步态)(如图5),共计24个仿真组成本研究的虚拟仿真系统。

图5 50%及100%2种行人步态Fig.5 50% and 100% pedestrian gaits
所有的仿真均基于Madymo仿真平台,与已有研究类似,仿真中人车碰撞的摩擦系数为0.3,人地碰撞的摩擦系数为0.6[29];车辆垂直撞击行人侧面;汽车与行人的初始碰撞位置有3种:人体相对于车体中心线向人体后退方向偏离400mm[31]、人体位于车体中心线、人体相对于车体中心线向人体前进方向偏离400mm(即模拟撞击时刻行人位于车头的左侧、中部和右侧),如图6。行人速度取1.58m/s[29]。
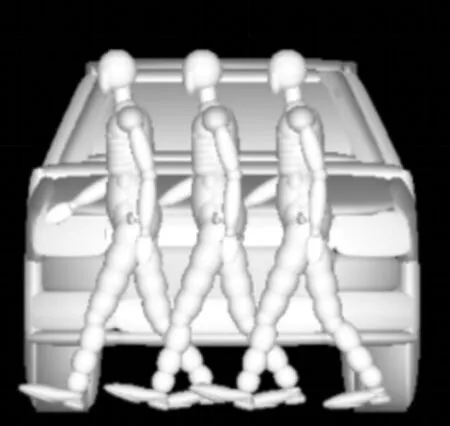
图6 行人与车辆初始位置Fig.6 The initial position of the pedestrian and vehicle
以虚拟仿真系统为基础,对轿车、SUV每一种车型各设计2组试验。第1组包含216个仿真,仿真中车辆完全制动;第2组亦包含216个仿真,每个仿真均采用图1所示方法控制车辆制动。具体的设计为:3种引擎盖形状(中凹引擎盖、中平引擎盖、中凸引擎盖)、2种车辆模型(轿车、SUV)、3种车速(21、31、41 km/h )×4种行人模型(5百分位女性、5百分位男性、50百分位男性、90百分位男性)×2种行人步态(50%行人步态、100%行人步态)、2种车辆制动策略(完全制动、控制制动)、3种碰撞形态(行人位于车头的左侧、中部、右侧),共计864次仿真。
4.2 评价指标
(1)HIC。在人车碰撞事故中头部损伤为行人死亡的重要原因,故选头部损伤评价准则HIC作为仿真中的行人损伤评价指标,HIC定义为:
(1)
式中:
t—碰撞起始到结束时间内的每个时间间隔,s;
a—头部质心合成加速度,m/s2;
t3—检测的加速度脉冲开始时间,s;
t4—检测的加速度脉冲结束,s。
在实际应用中最大时间间隔t4-t3常取15ms或36ms,由于人车碰撞中的碰撞时间历程较短,故常选择HIC15作为头部损伤评价指标,其安全界限为700,HIC15越大,头部损伤越严重。
(2)头车相对碰撞速度和头地垂直碰撞速度。头车相对碰撞速度vr指碰撞时刻行人头部相对于车辆的速度[48],定义如下:
(2)
式中:
vx、vy、vz—碰撞时刻行人头部沿x轴、y轴和z轴的速度分量,m/s;
vc—碰撞时刻车辆的速度,m/s。vr越大,一般头部损伤越严重。
现有研究证明,完全制动与控制制动的头地水平碰撞速度差异不显著[45],所以仅采用头地垂直碰撞速度。头地垂直碰撞速度vg指行人主要部位着地时行人头部沿z轴(垂直轴)的速度分量,此速度越大,一般可认为行人与地面碰撞损伤越严重。
4.3 分析方法
在Madymo仿真平台中,人车碰撞仿真模型已得到充分验证,但人地碰撞仿真模型尚有不足[27,30],为避免模型不确定的影响,在后续分析中主要采用对比分析法,即比对控制制动与完全制动2种策略下人体的损伤及运动学响应差异。
采用 Mann-Whitney U 检验分析仿真结果,对仿真中不同引擎盖形状的人车碰撞损伤和人地碰撞损伤等指标进行显著性检验,检验水平α=0.05,将损伤数据导入 SPSS 软件并根据试验变量合理分组运算后得到p值,根据p值的大小判断不同引擎盖形状的相关指标是否具有显著性差异。通常p< 0.01 时,有极显著性差异;当 0.01≤p< 0.05 时,有显著性差异;当p≥ 0.05 时,差异性不显著。
4.4 结果
4.4.1 采用制动控制的人车与人地碰撞损伤变化情况
通过统计后计算得出车辆和地面所致行人HIC的均值,见表2。由表2可知,制动控制策略在轿车和SUV车型中都不会增加车辆所致头部损伤的风险;轿车和SUV的控制制动组中,人地碰撞损伤均降低。其中轿车的人地碰撞损伤HIC均值从完全制动时的771.54降低到529.11,损伤值从超出安全阈值降低到阈值以内。这表明本研究中的轿车采取控制制动策略后,在不加重人车损伤的前提下可有效减轻人体所受到的地面伤害。

表2 2种制动方式的车辆和地面所致HIC均值Tab.2 The mean HIC value caused by the vehicle and ground under two braking modes
4.4.2 不同引擎盖形状的车辆所致人体损伤
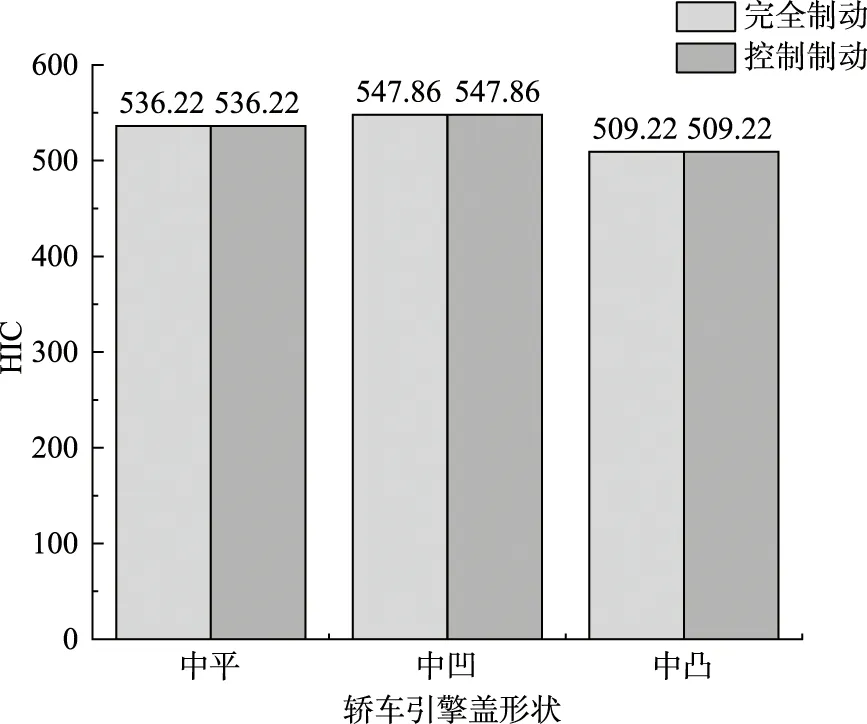
图7分别给出轿车、SUV采用中平、中凹、中凸3种引擎盖形状的车辆所致HIC的均值。可以看出3种引擎盖形状的轿车、SUV,采用控制制动的人车损伤均没有增加。Mann-Whitney U 检验发现,不同引擎盖形状的轿车完全制动(或控制制动)的人车HIC差异不显著,其中中凸引擎盖的人车碰撞损伤最低,HIC均值为509.22;不同引擎盖形状的SUV完全制动(或控制制动)所致人车HIC差异不显著,其中中凸引擎盖的人车碰撞损伤最低,HIC均值为398.03。
(a)轿车
4.4.3 不同引擎盖形状的地面所致人体损伤
图8分别给出中平、中凹、中凸3种引擎盖形状的轿车、SUV导致的人地碰撞HIC,图8中“中平完全”指采用中平引擎盖的轿车(或SUV)在车辆完全制动时的人地碰撞HIC。从图8中可以看出控制制动的轿车、SUV 2种车型导致的人地碰撞损伤风险均降低。
轿车采用控制制动时,3种不同的引擎盖中,中凸引擎盖的人车损伤HIC均值、人地损伤HIC均值均最低。中平引擎盖与中凸引擎盖的人地碰撞损伤具有显著性差异(p=0.013);中平引擎盖与中凹引擎盖的人地碰撞损伤的差异不显著(p=0.463);中凹引擎盖与中凸引擎盖的人地碰撞损伤的差异也不显著(p=0.071)。总之,轿车采用不同形状的引擎盖会影响人地碰撞损伤风险的大小,且中凸引擎盖的人地碰撞损伤风险最小,即防护效果最好。
SUV采用控制制动时,3种不同的引擎盖中,中凸引擎盖的人车损伤HIC均值、人地损伤HIC均值均最低。中平引擎盖与中凸引擎盖的人地碰撞损伤具有极显著性差异(p=0.001);中平引擎盖与中凹引擎盖的人地碰撞损伤的差异不显著(p=0.143);中凹引擎盖与中凸引擎盖的人地碰撞损伤的差异显著(p=0.022)。总之,SUV采用不同形状的引擎盖会对人地碰撞损伤造成显著影响,且中凸引擎盖的人地碰撞损伤风险最小,即防护效果最好。

(a)轿车
5 讨论
通过864次仿真实验,证实了图1所示制动控制策略在特定车型(轿车、SUV)的3种引擎盖形状都能有效降低人地碰撞损伤的风险,且不会加重人车碰撞损伤的风险。特别是选用制动控制策略的轿车,人地碰撞损伤HIC值均能降低到阈值以内,这都清晰表明图1所示的制动控制策略具有实用价值。仿真结果显示:采用制动控制策略,中凸引擎盖的轿车和SUV导致的人地碰撞损伤风险降低较为明显,降低的原因值得深入探讨。此外,仿真中还发现采用控制制动策略后,3种引擎盖下都存在人地碰撞损伤增加的案例(共66例,占15.3%),需深入分析其原因以支持后续研究中改进图1所示的策略。
5.1 中凸引擎盖人地碰撞损伤防护效果佳的原因
5.1.1 头地垂直碰撞速度vg降低
将432例控制制动组中的轿车、SUV导致的人地损伤HIC划分为5个区间,并统计各区间内的头地垂直碰撞速度vg值,发现HIC均值随vg的增大而增大(如图9),可见头地垂直碰撞速度vg的值可用来表征人体落地损伤的严重程度。

图9 人地损伤HIC与头地垂直碰撞速度vg的关系Fig.9 The relationship between the HIC of the human-ground injury and the velocity(vg)of the vertical head-ground contact
对比采用制动控制策略的轿车、SUV 3种引擎盖导致的头车相对碰撞速度vr与头地垂直碰撞速度vg并检验其差异性。如图10所示,发现不同引擎盖形状的控制制动所致vr之间差异不显著;图11中,中凸引擎盖的头地垂直碰撞速度vg相比其他2种引擎盖较低,且中凸引擎盖的vg与中平引擎盖的vg存在极显著性差异(p=0.0< 0.01),中凸引擎盖的vg与中凹引擎盖的vg同样存在极显著性差异(p=0.0< 0.01)。图9-11的分析表明:控制制动策略,轿车以及SUV 2种车型,中凸引擎盖的人地碰撞损伤防护效果较好的主要原因是头地垂直碰撞速度vg的降低。

图10 3种引擎盖的头车相对碰撞速度vrFig.10 The relative speed of the head-vehicle collision in case of three kinds of hoods

图11 3种引擎盖的头地垂直碰撞速度vgFig.11 The speed of the vertical head-ground contact in case of three kinds of hoods
5.1.2 行人落地机制的变化
CROCETTA等[26]学者提出一套行人被车辆碰撞后的6种落地机制(如图12),同时他们指出落地机制M1、M4的行人头地接触速度、旋转角度显著高于M2、M3、M5.1和M5.2,这意味着M1、M4可能会比M2、M3、M5.1和M5.2造成更大的人地碰撞损伤风险。ZOU等[45]通过仿真分析在此基础上又增加了一种全新的落地机制M6(如图13),认为此种落地机制对行人相对较好。故本研究将基于此7种落地机制来探究不同引擎盖形状导致行人落地机制的差异。
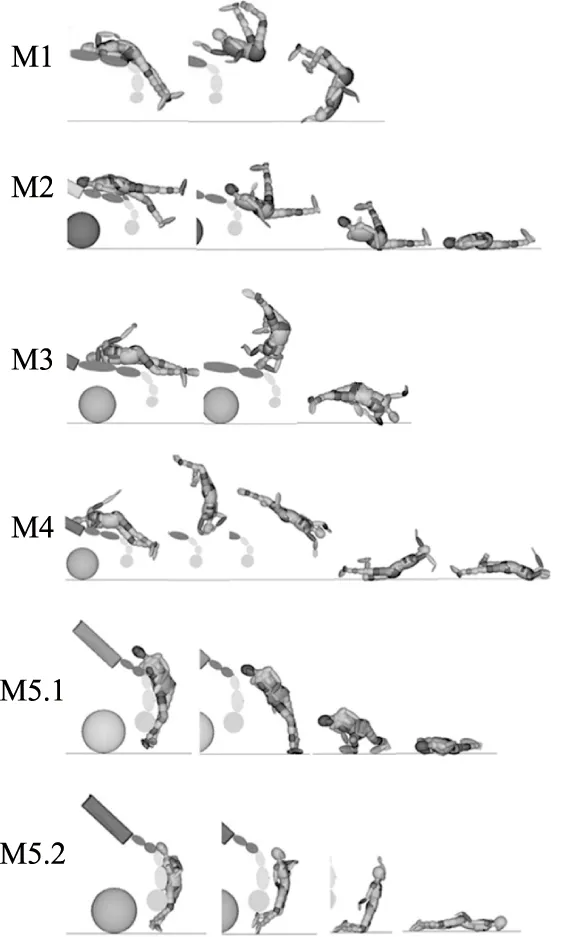
图12 文献[26]中提出的6种行人落地机制Fig.12 The six kinds of pedestrian landing mechanisms proposed in the literature [26]

图13 文献[45]中提出的1种行人落地机制M6Fig.13 A kind of pedestrian landing mechanism M6 proposed in the literature [45]
为验证本研究中落地机制的差异是否与人地碰撞损伤有关,在深入分析仿真视频后,统计432例控制制动组中的轿车、SUV不同落地机制的人地碰撞损伤HIC均值,如图14。由图14可知,不同落地机制的人地碰撞损伤有差异,且总体上M1、M4是造成平均人地碰撞HIC值较高的2种落地机制。由此,可进一步探讨采取控制制动策略后,不同形状引擎盖导致行人落地机制的差异性。图15给出采用控制制动策略时不同形状的引擎盖导致行人落地机制的分布,其中“Uncl”为不能明确分类到任何一种落地机制的案例。可以看出,中平、中凹引擎盖的行人落地机制为M1、M4的比例(分别为29.9%、29.2%)要比中凸引擎盖的比例(13.9%)高。因此,总体来看这2种引擎盖在制动控制时的人地碰撞损伤防护效果较差。中凸引擎盖导致的平均人地碰撞HIC值较低的几种落地机制(M2、M3、M5.1、M5.2和M6)的占比为84%,中平、中凹引擎盖分别为67.3%,68%。因此,轿车、SUV中凸引擎盖导致人地碰撞损伤较低的另一原因是制动控制后人体的落地机制由较差的机制转变为对人体更友好的机制,而其他2种引擎盖导致人体落地机制向友好机制的转变较少,所以人地碰撞损伤的防护效果也相对较差。

图14 行人不同落地机制导致的人地碰撞HICFig.14 The pedestrian-ground contact HIC caused by different landing mechanisms of pedestrians

图15 3种形状引擎盖导致的行人落地机制分布Fig.15 The distribution of pedestrian landing mechanisms caused by three kinds of hood shapes
采用控制制动策略时,轿车中平、中凹、中凸引擎盖的一组典型仿真为例来展开分析,仿真中除引擎盖形状外其他变量设置相同:车速31km/h、5百分位男性、100%行人步态,行人位于车头左侧。图16分别给出制动控制时中平、中凹、中凸3种引擎盖的行人运动学响应,0.165s为行人头部和车辆首次碰撞时刻,可见此时3种引擎盖的行人瞬时位置差别不大;0.63s时中平、中凹引擎盖的行人比中凸引擎盖的行人更接近车辆引擎盖前端边缘;0.95s时行人已被车辆抛出,行人脱离了引擎盖,此时能明显看出3种引擎盖导致行人姿态的差异,中平、中凹引擎盖的行人瞬时位置差别不明显,但中凸引擎盖的行人头部、胸部、臀部基本处于一个平面内,与其余2种引擎盖的行人运动学差别较大;到1.045s时3种引擎盖的行人都已经落地,其中中平及中凹引擎盖的行人背部和头部基本同时着地,头部会受到来自地面的较大冲击,继而头部也会产生比较大的垂直落地速度,落地姿态都为文献[26]中的M1,落地后的人地碰撞HIC分别为494.7、346.6;此时中凸引擎盖的行人,头部、背部、臀部等人体主要部位与地面平行,这些部位基本同时落地,且行人旋转角度较小,此时行人头部受到来自地面的冲击也会较小,落地姿态为文献[45]中的M6,落地后的人地HIC仅为56.97,此种落地姿态对行人来说相对友好。可见引擎盖形状的改变会导致行人落地姿态的改变进而导致差异化的人地碰撞损伤。

图16 中平、中凹、中凸引擎盖导致的一组典型仿真中行人运动学响应对比Fig.16 The comparison of pedestrian kinematic responses caused by medium-flat, medium-concave and medium-convex hoods in a set of typical simulations
5.2 非受益案例原因分析
轿车仿真的216例控制制动案例中,有23例(10.6%)人地碰撞损伤加重,包括中平引擎盖11例(47.8%),中凹引擎盖10例(43.5%),中凸引擎盖2例(8.7%);SUV仿真的216例控制制动案例中,有43例(19.9%)的人地碰撞损伤加重,包括中平引擎盖18例(41.9%),中凹引擎盖15例(34.9%),中凸引擎盖10例(23.2%)。在总计432例控制制动案例中,控制制动失效案例66例(15.3%),其中轿车、SUV2种车型中凸引擎盖的非受益案例为12例;中平、中凹引擎盖的控制制动失效案例为54例,占总失效案例数的81.8%。3种引擎盖控制制动66例非受益案例的原因分析如下:
(1)人车第二次接触时,引擎盖或保险杠等与人体头部或胸部接触,如图17(a),44例,占66.7%。在这类案例中,车辆将行人撞起后人体坠地时头部或胸部会接触到引擎盖或保险杠,再次接触则可能会对行人坠地姿态产生不利影响,甚至个别案例中会改变人体落地时的姿态,造成行人头部与地面间产生更多冲击,导致人地碰撞时的伤害加重。
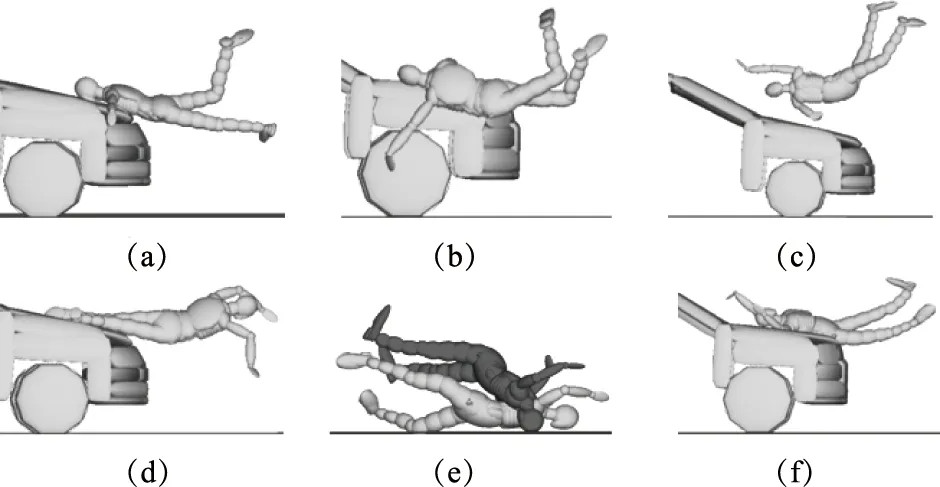
图17 制动控制下中平、中凹引擎盖典型人地损伤增加案例Fig.17 The additional cases of the pedestrian-ground injury caused by medium flat and medium concave hoods under the braking control
(2)行人从车辆某一侧落地,如图17(b),9例,占13.6%。此种类型中,行人从侧面落地时如与引擎盖边缘或车头侧面接触,则会受到一个侧向的加速度影响,这会导致行人以较快的速度撞击地面进而使人地损伤有所加重;即使行人在侧面下落时未接触车体,车辆在不转弯的情况下也会因无法适时进行控制进而无法对即将掉落到车体两边的行人进行比较好的防护。
(3)人与车第一次接触后即被车辆以一个比较高的瞬时速度抛出,如图17(c),6例,占9.1%。此种情形下,由于人体主要部位一接触车体,就被车体以较高的速度抛出,行人很可能不会与引擎盖再次接触,即车辆此时无法达到控制策略中的再次完全制动车辆,不能对行人继续实施制动控制。
(4)车辆制动控制中,人体下肢与车辆前端再次接触,如图17(d),4例,占6.1%。这种情况由于车辆还未停止,因此行人可能还会受到车辆带来的一部分冲击,会使人体已受到的旋转速度转变为人体头部与地面之间的垂直撞击速度,从而加重了人地碰撞损伤。
(5)控制制动显著改变了人体不同部位的落地顺序,如图17(e),2例,占3%。图17(e)中黑色为控制制动时的行人坠地姿态,灰色为完全制动时的行人坠地姿态。图17(e)中可以看出,该仿真案例中完全制动的情况行人是右侧膝盖首先触地,而在同一时刻,控制制动中的行人却是头部首先触地,进而导致行人头部损伤增加。这说明在现有实验条件下,控制制动还很难起到100%降低人地碰撞损伤的效果。
(6)人车在较长一段时间内没有分离。行人被车辆撞至引擎盖后被引擎盖托起,车辆载着行人在较长时间内一起向前运动,导致车辆与行人在较长时间内没有分离,如图17(f),1例,占1.5%,进而人体获得的动能比完全制动时更多,所以人地碰撞损伤从完全制动时的184.5增加到了控制制动中的400。
6 结论
通过分析事故数据、回顾已有研究并开展仿真实验,获得以下结论:
(1)人车碰撞事故在可预期未来很难完全避免,但事故中车速会降低至中低速区间内。而在此速度区间,人体受车辆致命伤的概率不高,但地面会给行人带来严重的二次伤害,因此,亟需考虑智能车的人地碰撞损伤防护能力。
(2)事故与实验数据均显示,面临碰撞风险时行人有极强的避撞能力,行人最高减速度可达8m/s2,进一步仿真与实验均表明在行人自动紧急制动系统中考虑行人的这种能力可以显著提升事故避免率,但相关研究尚处于探索阶段,仍有人机如何交互、何时交互以及行人如何反应等诸多问题需深度探索。
(3)仿真和真实案例均显示,通过合理控制车辆制动可以显著降低人地碰撞损伤,绝大多数案例中均有足够空间让车辆实施制动控制,除此之外控制车辆制动还能拉近人体首次触地位置与车头间距离为其他车载设备保护行人提供可能,但要求车辆在较短时间内做出正确决策,这应是后续研究中需重点关注的核心问题。
(4)通过864次仿真实验进一步证实:制动控制策略在特定车型(轿车、SUV)的3种形状引擎盖都能有效降低人地碰撞损伤风险,且不会加重车辆所致损伤;制动控制案例中人地碰撞损伤数值均能控制在人体损伤耐受极限阈值内;中凸引擎盖无论是防护人车碰撞损伤还是人地碰撞损伤,效果均最佳。
(5)通过分析864次仿真中人体的运动学和动力学响应,发现中凸引擎盖效果更佳的主要原因是其能更好地降低人地垂直碰撞速度以及导致更多相对安全的人体落地机制。非受益案例分析表明,人车碰撞中人体差异化运动学响应会影响人体损伤防护效果,可在后续研究中适时开展碰撞后人体运动学响应预测研究。