一种拮抗式气动肌肉驱动柔性关节的动态面控制
2023-01-11周滔
0 引言
可穿戴式外骨骼机器人作为一种并联穿戴在人体上的特殊机器人,它能够辅助人体完成部分动作达到节省体力或者增强负载能力等功能。其系统的设计需要满足柔顺行好、控制精度高、可靠性强等特点。而关节作为可穿戴式外骨骼机器人最主要的部件之一,控制策略显得尤为重要。
国内外在对柔性关节的控制上做了大量研究,如PID控制、滑膜控制、鲁棒控制、模糊控制[2-5]等。虽然现在对柔性关节的控制研究很多,但是实际应用中仍然存在控制精度差、抗干扰能力弱以及外部扰动等问题。
本文该关节建立的非线性动力学模型基础上采用了动态面控制,增加了K-观测器,避免了控制过程中计算量过大的问题,同时因为该控制能将复杂的非线性系统简化为多个子系统,因此相较于传统控制有着明显优势。
1 柔性关节的数学模型
首先我们从气动肌肉驱动力模型出发,该部分采用的模型从Chou于1996年基于虚功原理提出的模型出发。对PAM驱动力Fa、Fb分别可以用下式表示:
式中,L0为气动肌肉初始长度;b螺纹长度;Pa、Pb分别为气动肌肉a、b中的压强;Patm为大气压强。
我们假设气动肌肉内部为一个绝热过程,通过流入气动肌肉的气体来模拟肌肉内部的变化,在从气动肌肉中气体的热力学出发,可以得到内部压力的变化速率。然后,根据能量守恒原理,我们得出

式中,γ是气体比热比,R是通用气体常数,T是气体温度,q˙是流入或流出每个PAM的质量流量,V是每个PAM中的气体体积。
在对上式中PAM的体积V进行计算时可以通过高阶多项式线性拟合可以很好的近似。

图1为气动肌肉体积与收缩率经过实验测得数据后,在MATLAB曲线拟合工具箱后得出的拟合曲线,在未充气状态下气动肌肉体积约为0.79×10-4m3,当收缩率达到最大25%时其体积约为1.81×10-4m3。

图1 收缩量与体积相关性拟合曲线
柔性关节的结构如图2所示。

图2 柔性关节模型
仿生关节的动力学方程为:

式中,I和J分别为关节等效转动惯量与滑轮等效转动惯量,qa和qb分别为关节角度与滑轮转动角度,mp为滑轮质量,为滑轮半径;m为负载等效质量;l为连杆等效长度;cθ˙为关节阻尼项;u为系统输入,v为关节受到的未知扰动。
联立上式,我们得到柔性关节系统的非线性动力学模型,我们定义状态量x1=qa,x2=q˙a,x3=qb,x4=q˙b。得到柔性关节的状态方程

2 基于K-观测器的动态面控制
2.1 柔性关节K-观测器设计
将系统方程改写成

选取向量k=[k1k2k3k4]T,使得为A0=A-kcTHurwitz。设计k-观测器如下:

其中ω,φ1,φ2,φ3,v为观测器状态向量e4=[0 0 0 1]T,v=[v1v2v3v4]T,
状态估计量为:

观测器的估计误差为:

2.2 控制器设计
下面我们结合k-观测器利用连杆输出信号设计控制器。
首先我们需要分别定义S1,S2,S3,S4四个误差表面:
分别求导得:

将(11)带入S1得:
令
令虚拟控制

自适应律为:

其中,δ为正定对称矩阵,η为正设计参数。

其中,ρ2为低通滤波器的时间常数,v2d为新的状态变量。
同理对S2,S3,S4,处理方法与上面相同。
在上述设计过程中,我们通过状态量对输出进行了反馈并控制,同时在设计过程中仅使用一个自适应律便估计了所有未知参数,优化了设计过程,减小了计算量。
3 动态模型仿真
下面在Matlab环境下对气动肌肉关节系统进行数值仿真。仿真结果如下,图3、图4为在K-观测器下各状态观测及状态观测误差

图3 关节运动角速度仿真

图4 关节运动角度仿真
在该模型中,部分参数如表1所示。
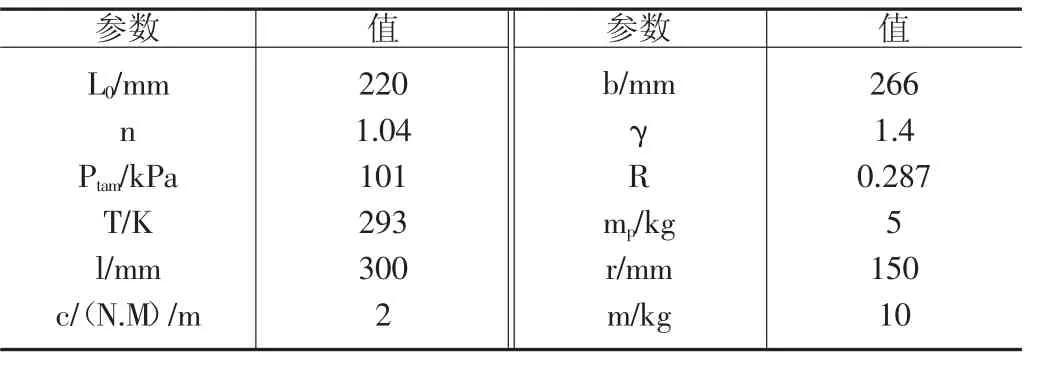
表1 柔性关节模型部分参数
图3、图4显示负载在正弦运动指令下的测量运动。
图3、图4给出了10s内跟踪期望轨迹xd=sint,控制干扰dt=100sint下的角度与速度稳态响应,图3(a)和图3(a)分别为关节运动过程中的角度与角速度响应曲线,图中可以看出在关节运动的前1秒内系统会有一些波动,在剩下的大部分时间内,其理论曲线与仿真曲线基本处于重合状态。
图4(b)和图3(b)分别为关节运动过程中的角度与角速度的误差曲线曲线,在关节刚运动时误差值较大,在随后一秒内曲线逐渐趋于平稳,最终在零刻度线上下浮动。
4 结论
由于气动肌肉本身特性使得柔性关节难以控制,在采用基于K-观测器的动态面控制后。从最终的控制效果来看,系统除了最开始1秒内有较大波动,其余时间均处于较为稳定状态。
综上所诉,对柔性关节建立其非线性模型后,在通过基与K-观测器的动态面控制能够有效提高关节的控制精度。很大程度上解决关节控制精度差、抗干扰能力弱以及外部扰动等问题。
