非线性耦合多智能体系统组编队跟踪控制
2023-01-11杜向阳李伟勋陈增强张利民
杜向阳,李伟勋,陈增强,张利民
(1.天津职业技术师范大学理学院,天津 300222;2.南开大学人工智能学院,天津 300350;3.中原工学院电子信息学院,郑州 451191)
0 引言
近年来,多智能体系统的分布式协调控制得到了广泛的关注和研究[1-5]。编队控制作为多智能体协调控制里重要且基础的一部分,在各种系统里面实用性比较强,所以有必要对它进行深入研究。目前对编队控制的研究大致分为3个方面,基于行为的方法[6]、领导者-跟随者的方法[7-8]和虚拟结构的方法[9]。
在面对复杂的任务和环境时,对多智能体系统进行分组去完成一个共同的目标或者多目标更有优势。文献[10]通过引入双树形变换,解决了具有时滞的切换拓扑下的多智能体系统组的一致性问题。文献[11]设计了混杂协议,得到了多智能体系统组一致性的充分条件。文献[12]首次将文献[10]中的保守假设推广到智能体在不同组的信息权重之和为一常数的前提下,得到了多智能体系统组一致性的充分条件。文献[13]则针对线性多智能体系统得到了实现组一致性的充要条件。多智能体系统的编队控制和一致性控制有着异曲同工之妙,例如在基于领导跟随一致性控制分析里面,是让跟随者随着时间逐步收敛到领导者的状态,而编队控制相较于一致性控制多了编队向量,即让跟随者随着时间收敛到领导者与编队向量的和的形式。当编队控制里面的编队向量趋于零时,编队控制就转化为一致性控制问题,而当组一致性问题里面添加编队向量时,就形成了组编队控制问题,此时每一个子组的智能体就会构成一个期望编队结构。
事实上,无论在自然界还是人类社会,群体中的多个个体通过形成一定的结构来完成目标任务的现象是非常普遍的,如多任务移动机器人的分散形成以及多利益冲突的社会社区的分裂形成。所以对于多编队控制问题的研究具有很大的实际和应用意义。截止到目前为止对多编队控制问题的研究结果并不多见,主要是对组一致性,集群一致性,多跟踪问题的研究。不依赖大多数相关研究工作中提出的一些保守假设,文献[14]得到了一些可以保证多智能体系统达成群体共识的很有前途的标准。文献[15]研究了具有几种不同子群的一种新的聚类共识,基于马尔可夫链和非负矩阵分析,分别得到了具有固定拓扑和切换拓扑的两种新的聚类一致准则。文献[16]基于智能体是向同一目标移动还是向单独的目标移动,提出了两种潜在的函数来进行群集算法,研究了一种多智能体系统的多目标跟踪群集算法。文献[17]研究了非线性领导跟随多智能体系统的多编队控制问题,给出了基于相邻信息的多编队控制协议。
综上所述,另考虑到非线性系统[18-19]对实际大部分现象和规律具有较优越的吻合度,本文主要解决了在没有保守假设下,组内组间都存在耦合的非线性领导跟随多智能体系统的多编队控制问题。基于系统的拉普拉斯矩阵,跟随者和领导者的连接矩阵,提出了新的控制协议去实现带有多领导者的二阶非线性系统和双积分器系统的组编队跟踪控制。
1 预备知识与问题阐述
1.1 图论知识

为了下面讨论的方便,定义如下的映射

1.2 模型阐述和相关引理
考虑一个含有M+N个非线性耦合的多智能系统,其跟随者的二阶动力学系统描述为
(1)
其中,xi(t)∈Rn,vi(t)∈Rn分别代表智能体i的位置和速度,ui(t)∈Rn,f(vi(t),t)∈Rn分别为第i个智能体的控制输入和内部动力学,f是一个非线性连续可微向量函数。其M个领导者的二阶动力学描述为
(2)

假设1非线性连续可微向量函数f满足一个全局的利普希茨条件,如果存在一个正的常数ρ使得
|f(v1,t)-f(v2,t)|≤ρ|v1-v2|,∀v1,v2∈Rn
假设2一个含有M+N个智能体的系统,假定其领导跟随连接矩阵B=diag(b1,b2,…,bN)≠0,即存在i∈V,使得第i个跟随者与第δ(i)个领导者有信息交换,bi>0。

定义1针对带有领导者的多智能体系统(1)、(2),如果对任一子组l∈[1,2,…,M]和任意的初始状态都存在一个控制协议,使得同一组的所有智能体形成一个被设计的队形,即

其中,hi∈Rn是智能体i相对于领导者δ(i)的编队向量,则称多智能体系统达到了组编队一致性。
注2由定义1可以看到,当编队向量hi=0时,多智能体系统的编队控制问题就转化成了一致性或组一致性问题,也即组一致性问题是组编队控制问题的特殊情况。所以组编队控制问题的研究具有更一般的普遍性。
引理1[20]对于一个连通的无向图G,如果至少存在一个跟随者与领导者有信息连接,即B≥0,则矩阵L+B>0。
引理2[21]矩阵不等式(Schur补引理)

其中,Q(x)=QT(x),R(x)=RT(x),等价于如下的条件之一:(1)Q(x)>0,R(x)-ST(x)Q-1(x)S(x)>0;(2)R(x)>0,Q(x)-ST(x)R-1(x)S(x)>0。
引理3[22]假设两个厄米特矩阵A,B∈Rn×n,α1≥…≥αn,β1≥…≥βn,γ1≥…≥γn分别为A,B和A+B的特征根,则有
αi+βn≤γi≤αi+β1,i=1,2,…,n
引理4[23]对于任意合适维度的向量x,y∈Rn以及合适维度的对称正定矩阵Z∈Rn×n,都有
±2xTy≤xTZx+yTZ-1y
2 主要研究结果
通过设计一种新的控制协议,结合李雅普诺夫稳定性理论和代数图论证明了系统的稳定性。
2.1 非线性耦合领导跟随多智能体组编队控制
为解决多编队控制问题,设计控制器为

(3)
其中α,β>0为耦合强度,bi,δ(i)为智能体i和领导者δ(i)的连接权重,k>0为控制增益。
注3相较于文献[17]基于分组的假设,即对于一个子组,从其他子组接收到的信息总数为零而设计的如下的控制协议

本文中的控制器强化了不同组之间智能体的通讯能力,使得多智能体系统面对复杂的实际环境可以有更好的灵活性和抗干扰性。
定理1在假设条件(1)~(2)下,通信网络为无向拓扑的非线性耦合领导跟随多智能体系统在控制协议(3)下,可以实现多编队跟踪控制,如果系统参数满足如下两个条件
(4)
和
(5)
证明:令
得到其误差系统为

(6)
将误差系统写成向量形式

(7)
其中,




将Lyapunov泛函重新写为
(8)
计算V(t)沿轨迹(7)的时间导数,得到

根据假设1和引理4有

(9)
和
(10)
其中,取正定矩阵Z为单位矩阵IN,整理得
注4对定理1的分析,可以看到控制增益k的取值取决于耦合强度α,β,利普希茨常数ρ以及矩阵L和B的特征根的共同作用,也就是多智能体系统之间的交互拓扑和耦合强度对控制增益有影响。
2.2 双积分器耦合领导跟随多智能体组编队控制
考虑智能体的内部动力学f≡0,则多智能体系统可以简化为如式(11)的形式
(11)
领导者的动态为
(12)
这表明领导者的参考速度为恒定常数。基于控制协议(3)有
写成矩阵形式为

(13)
对于对称矩阵H的定义和上面讨论的一样,从定理1的结论和证明可以很容易得到推论1。
推论1在无向通信拓扑和假设条件(2)下,控制协议(3)可以让多智能体系统(11)和(12)实现多编队跟踪控制,如果系统参数满足如下的条件
(14)
3 数值仿真
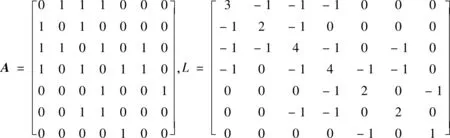
例1考虑一个具有7个跟随者和2个领导者的二阶非线性多智能体系统。其拓扑结构如图1所示,7个跟随者被分为两个子组,分别为V1=[1,2,3],V2=[4,5,6,7],领导者为l1,l2。假设网络的每条连接权重均为1。故其权重矩阵和拉普拉斯矩阵为
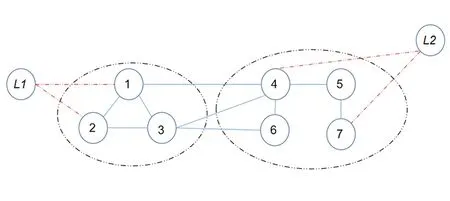
图1 通信拓扑图G Fig.1 The communication topology G

图2 带有非线性动态的位置轨迹Fig.2 Trajectory of position with nonlinear dynamics

(15)
领导者的非线性动态如式(16):
(16)
令耦合强度α=β=1,利普希茨常数ρ=0.05,增益k=4,显然可以看到假设1和假设2满足,并且定理1成立。设h1=(0,0.5),h2=(-0.5,0),h3=(0.5,0)为组1的跟随者的期望队形向量。组2的跟随者的期望编队向量为h4=(0,0.5),h5=(0.5,0),h6=(-0.5,0),h7=(0,-0.5)。

图3 带有非线性动态的位置和速度变化Fig.3 Changes in position and velocity with nonlinear dynamics

图4 带有非线性动态的位置和速度误差Fig.4 Position and velocity errors with nonlinear dynamics
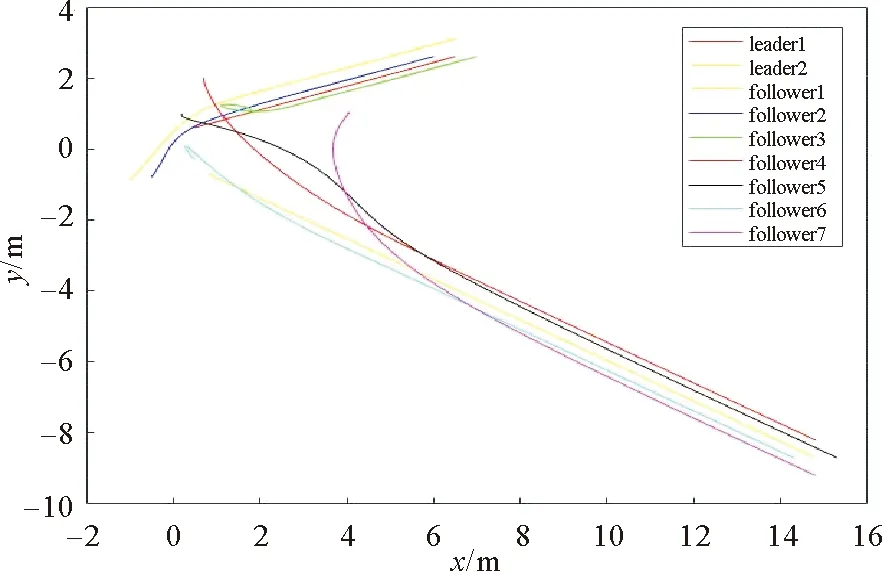
图5 双积分器系统的位置轨迹Fig.5 Position trajectory of a double integrator system
在控制协议(3)下,非线性系统的队形仿真结果如图2所示。图3刻画了跟随者的位置和速度分别沿着x轴和y轴随时间变化的状态。图4刻画了每个跟随者在x轴方向和y轴方向的位置误差和速度误差。由图2-4的仿真结果可知非线性耦合引领跟随多智能体的多编队控制在无向拓扑结构下实现了。
例2取耦合强度α=β=1,增益k=4,非线性动态为零。在相同的结构拓扑下,双积分器的多编队仿真效果如图5所示。
图6为跟随者沿x轴和y轴的位置与速度的状态变化,图7为跟随者在x轴和y轴方向上的位置误差和速度误差。由图5~图7可以很容易看出双积分器耦合引领跟随多智能体的多编队控制问题解决了。

图6 双积分器系统的位置和速度变化Fig.6 Changes in position and velocity of a double integrator system

图7 双积分器系统的位置和速度误差Fig.7 Position and velocity errors in a double integrator system
4 结论
本文在无向拓扑结构下基于领导跟随的方法研究了具有非线性动态和双积分器的多智能体系统。没有借助于传统的保守假设,设计了一种新的控制协议,根据李雅普诺夫稳定性理论和代数图论,得到了系统实现多组编队控制的充分条件,并在最后通过仿真实例说明了所得结论的正确性。另外,考虑到多智能体系统中存在具有不同动态的个体以及时变的几何结构,会在接下来的工作中研究异质多智能体系统的时变编队跟踪控制问题。
