基于云平台的加油站环境净化技术研究与应用
2023-01-08朱文杰赵文兵赵奇顾勇
朱文杰 赵文兵 赵奇 顾勇
(1. 中国机械总院集团江苏分院有限公司,江苏常州 213164;2. 常州机电职业技术学院,江苏常州 213164)
1 引言
由于加油站靠近公路,灰尘和汽车排放等导致空气中的PM2.5,PM10含量高。同时油罐车装卸、加油作业等过程中逸散的油气成为VOCs(挥发性有机物)污染物的一个重要来源。VOCs 易与空气中的氢氮化合物产生化学反应生成臭氧,造成臭氧污染。臭氧与PM2.5是我国空气污染的两个主要来源。加油操作需要在户外进行,夏天温度过高以及冬天的气候干燥,都会导致环境舒适度变差。在当前城市PM2.5,PM10治理中比较有效的是雾化除尘技术。高博等[1-2]总结了雾化除尘技术的原理并比较了不同的实现方法。通过雾化技术产生1~30 μm 之间的微小水颗粒,与PM2.5,PM10等微小粉尘颗粒互相吸附后沉降,达到净化目的。雾化主要有高压雾化、超声波雾化、介质雾化等方法。超声波雾化能够产生更小的水颗粒,抑制PM2.5更有效,但因为水流量较小,对环境温度和湿度的影响有限,高压雾化则正好相反。陈家庆等[3-4]总结了加油站的VOCs 治理技术,加油站VOCs 污染源是油罐车卸油过程的泄漏和加油时油箱中的汽油挥发。因此加油站的VOCs 控制主要是依靠卸油和加油时的回收技术,避免让汽油挥发到空气中,已经挥发到空气中的汽油则通过活性炭等过滤技术来进行净化抑制。当前空气净化研究中,PM2.5和VOCs 一般都分开单独研究与处理,而针对加油站的特殊空气净化需求同时考虑PM2.5以及VOCs 的研究还比较少见。本文提出了一种基于云平台的加油站空气净化综合解决方案,既可以抑制PM2.5,PM10,又可以消除VOCs,同时还可以控制加油站加油空间的温湿度,提高加油环境的舒适度,通过云平台进行远程监控大大提升了设备的管控水平。
2 综合解决方案
如图1 所示,本方案综合了高压雾化技术、超声波雾化技术、活性炭过滤技术以及网络控制技术[5-7]。高压雾化通过高压水泵和高压喷头实施,主要用于PM10的抑制和温湿度的控制;超声波雾化通过水泵提供水流、空压机提供高压空气采用超声波喷头实施,主要用于PM2.5的抑制;活性炭过滤器用于消除空气中的VOCs。当系统需要高压雾化时,通过变频器的频率控制高压水泵的水压,进而控制加油环境的温湿度,高压雾化主要用于温湿度的控制及PM10等较大灰尘颗粒的抑制。当需要降低PM2.5,VOCs时,系统启用超声波雾化功能,空压机开始工作,超声波利用水泵工作,压缩空气和加压水流进入超声波喷头,进行空气净化。活性炭过滤器主要清除空气中的VOCs,超声波喷嘴产生超细水颗粒,抑制PM2.5等较小灰尘颗粒[8-10]。
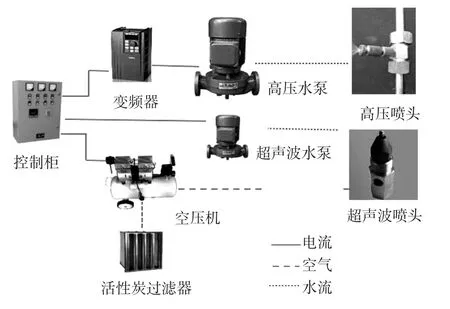
图1 加油站环境净化系统组成
3 方案的具体实施
3.1 调试运行
本方案在常州青果巷某加油站进行调试运行,高压水泵为BOTUO 的BM-15-18 型高压柱塞式水泵,水压为180 bar,功率为5.5 kW。采用港特1010 型高压喷嘴100 个,流量为0.09 L/min。超声波水泵采用光泉40F-13 离心水泵,功率为0.55 kW,水压为1.3 bar。超声波雾化喷嘴采用华崛雾宝的SK508 型喷嘴5 个,气流量为112 L/min,水流量为0.359 L/min,气压为5 bar,水压为1 bar。空压机采用奈绅150L-4500W,空气流量为750 L/min,气压为8 bar。图2 为加油站净化系统控制柜。

图2 加油站净化系统控制柜
3.2 控制系统
3.2.1 控制系统硬件
控制系统是整个系统的核心部分,采用网络控制和开关量控制相结合的技术,如图3 所示。以信捷XD3 系列PLC 为核心,采用MODOBUS 485 串行网络连接信捷变频器、温湿度+PM2.5+PM1.0传感器、声音提示模块等,通过I/O 连接空压机接触器、远程控制器等模块。
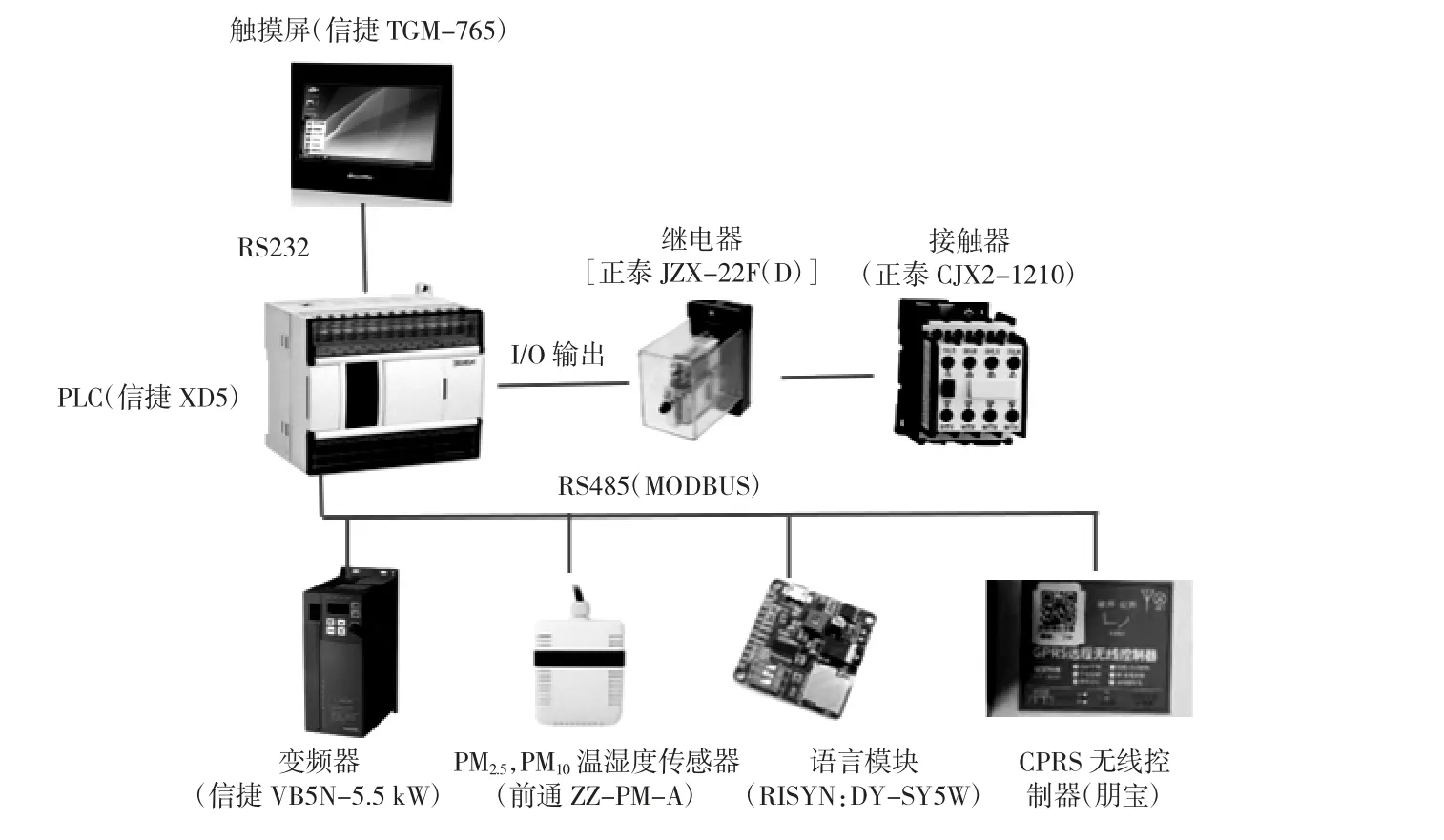
图3 加油站净化控制系统组成
3.2.2 控制系统软件
软件分PLC 程序、触摸屏程序和远程控制程序3 个部分。PLC 程序实现系统的运行和监测控制,触摸屏程序实现现场人机交互的控制和监视功能,远程控制程序通过无线控制器实现远程的运行控制与监控。
3.2.2.1 PLC 程序
PLC 程序的层次结构如图4 所示。主程序根据逻辑条件调用时间处理、状态数据处理、语言处理、运行控制等子程序。时间处理子程序处理系统的累积运行时间,同时计算高压泵的润滑油更换的剩余时间和空压机活性炭过滤板的更换时间。状态数据处理子程序主要通过解析RS485 的通讯协议获取温度、湿度、PM10、PM2.5等数据并保存。语言处理子程序主要处理系统运行时的语言提示,包括开关机的语言、按钮的提示音以及缺水、换润滑油、换过滤板等提示音。运行控制子程序包括连续运行、开停的间隙运行以及以温湿度、PM2.5、PM10的极限值为参考控制系统运行的保护运行方式,缺水、润滑油、过滤板到期时保护系统停止运行并进行报警提示。
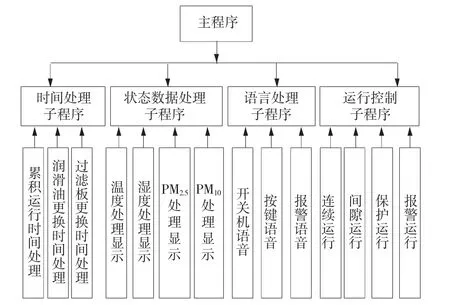
图4 PLC 程序的层次结构
3.2.2.2 触摸屏程序
触摸屏程序主要实现现场的人机交换监控功能,如图5 所示。触摸屏主要实现监视和控制功能,监视的内容为水泵、空压机、泄压阀的工作状态,以及温度、湿度、PM2.5、PM10、滤芯更换剩余小时、机油更换剩余小时、累积运行小时等;控制主要选择设备的运行模式,进行设备的开始、停止控制,过滤复位及加油复位的操作。

图5 现场控制人机界面
3.2.2.3 远程控制程序
远程控制程序包括无线控制器程序、服务器管理程序、手机客户端APP 程序3 个部分。无线控制器以ADRUNO 控制器为核心,包括通过RS485 通讯采集PLC 的状态数据并上传到服务器端;服务器管理程序实现数据的采集、管理以及提供手机的数据查询服务功能;手机客户端APP 实现远程的监视和控制功能。远程控制APP 界面如图6 所示。
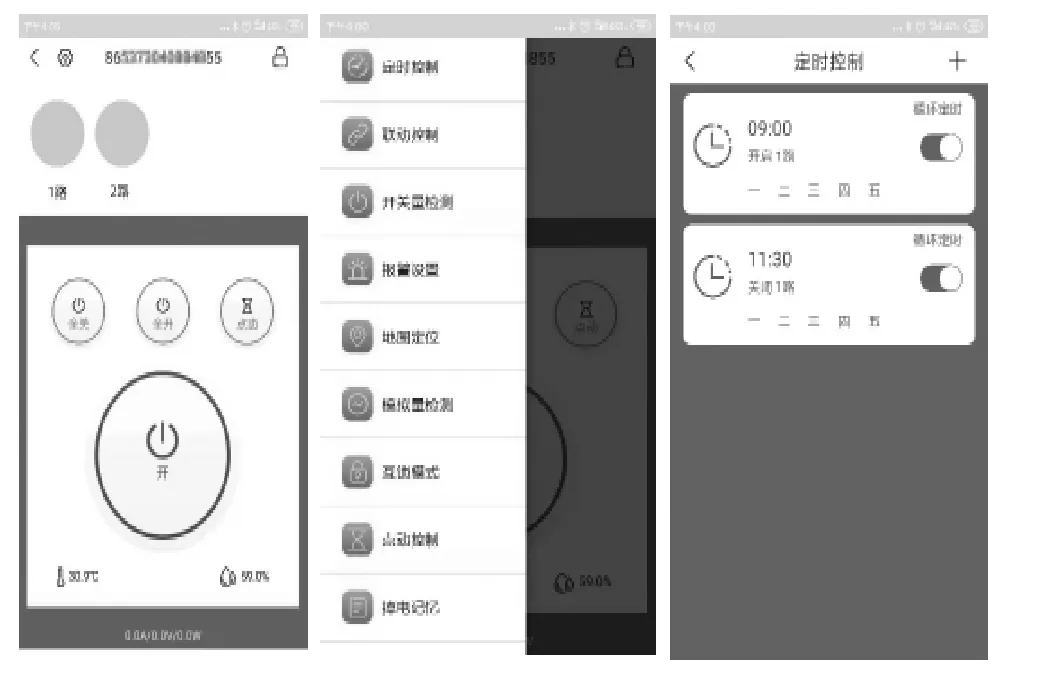
图6 远程控制APP 界面
4 测试结果与讨论
4.1 测试方案
测试的主要目标有两个,即比较不同工作模式的效果和不同雾化模式的效果。工作模式包括连续运行模式和间隙运行模式,雾化模式包括单独高压雾化模式、单独超声波雾化模式以及混合雾化模式。具体测试方案见表1。2021 年10 月24—27 日4 d 在青果巷加油站进行了系统的测试,从每天12:00 开始至13:40 测试结束。通过安装在固定点的传感器来采集温度、湿度、PM2.5、PM10数据,传感器的数据采集周期为2 min。
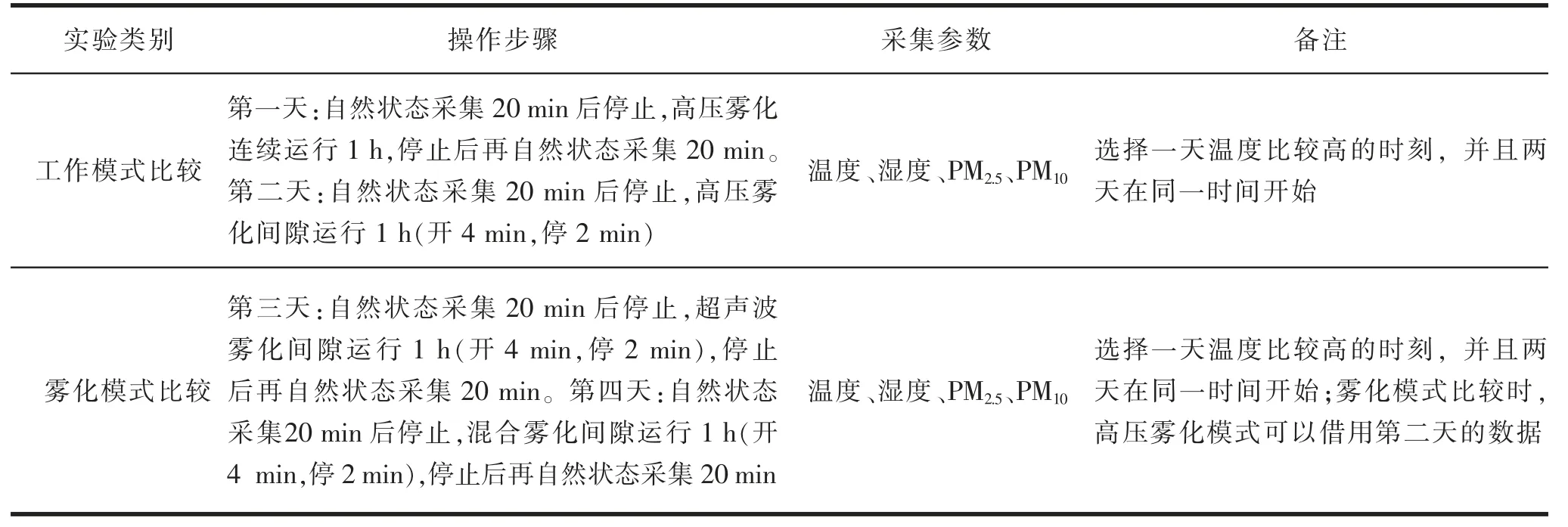
表1 测试方案
4.2 比较分析
4.2.1 运行模式的比较
正常的工作模式有连续运行与间隙运行(开4 min,停2 min)2 种。现以单独雾化的喷雾模式来进行比较,如图7 所示。温度、湿度曲线比较中,2 种模式的效果相似,雾化产生的温差和湿度差不大,连续运行效果稍好。在2 种运行模式中,PM2.5和PM10差距较大,连续运行模式中,PM2.5和PM10的值甚至大于自然状态值。出现这种状况的主要原因是,雾化产生的液体颗粒没有沉淀下来,在空气中被传感器认为是PM2.5或者PM10颗粒,导致检测值增大,当采用间隙运行时,雾化液体颗粒有充足的时间裹住尺寸类似的灰尘颗粒沉淀,因此检测效果较好。综合温度、湿度、PM2.5、PM10的运行模式比较实验,可以得出结论,在正常运行时采用间隙运行方式综合效果较好。只有在温度极限或者湿度极限的条件下才进行连续运行,以实现快速降温、加湿的功能。
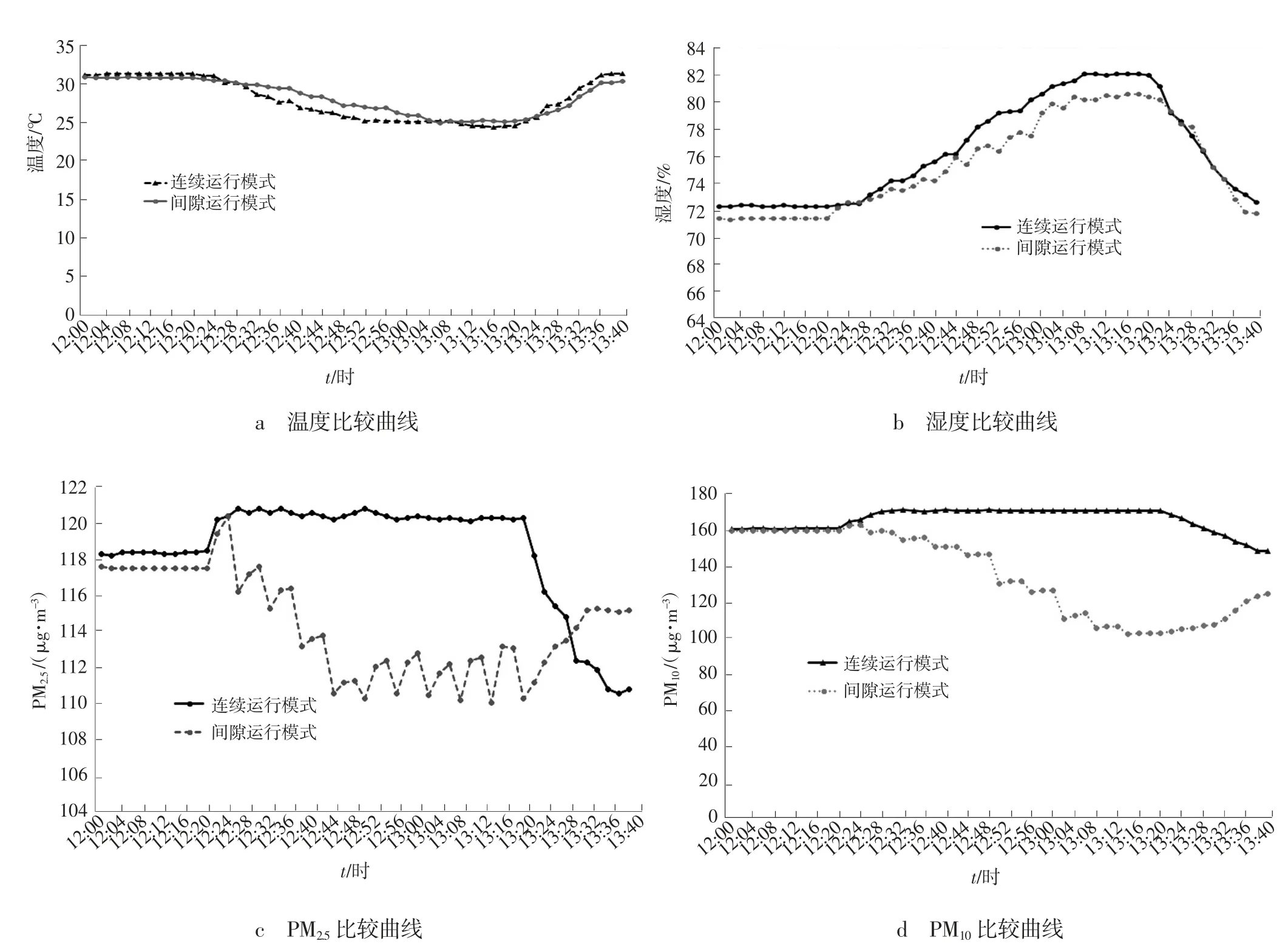
图7 运行模式比较曲线
4.2.2 雾化模式的比较
雾化模式有高压雾化、超声波雾化、混合雾化3种,采用的运行模式是间隙运行,运行状态如图8 所示。从PM2.5和PM10的比较曲线可看出,超声波雾化能显著降低PM2.5的值,但对PM10无效果,高压雾化能显著降低PM10的值,对PM2.5效果不明显。这种现象出现的主要原因是,根据雾化除尘的原理,雾化产生的液体颗粒只吸附与自己直径类似的灰尘颗粒。超声波雾化可以产生小于5 μm 的液体颗粒,因此对PM2.5效果明显,高压雾化产生的颗粒大于10 μm,因此对PM10的效果比PM2.5要好。

图8 雾化模式比较曲线
综合温度、湿度、PM2.5、PM10的雾化模式比较实验得出结论,在正常工作情况下采用混合雾化模式的效果较好。
5 结论
针对加油站存在的环境污染比较严重、环境舒适度较差等问题,提出了一种基于云平台的加油站空气净化的综合解决方案,综合抑制PM2.5,PM10,VOCs 等污染物,同时通过控制加油站加油空间的温湿度,提高加油环境的舒适度。该方案已经进行样机的试制及测试,达到预期效果,下一步需对该方案进行细节的优化设计并进行市场推广。