智能驾驶车辆纵横向运动控制仿真研究
2023-01-06谭海鑫
谭海鑫
智能驾驶车辆纵横向运动控制仿真研究
谭海鑫
文章分析了智能驾驶车辆纵、横向运动特性,作出合理假设,并建立纵横向车辆动力学模型。分别设定车辆纵、横向运动的期望轨迹,基于线性二次型调节器(LQR)方法控制车辆横向运动,运用比例-积分-微分(PID)控制器调节车辆纵向运动。结合Carsim软件建立车辆运动模型,并在Matlab/Simulink中分别建立车辆纵、横向控制算法。仿真分析表明,车辆纵、横向运动控制算法具有良好的控制效果,使得仿真车辆很好地跟踪了期望运动轨迹。
智能驾驶;纵横向运动;线性二次型调节器;比例-积分-微分控制器;Carsim;Matlab/ Simulink;车辆运动模型
传统汽车行业加持信息科技变革造就了智能驾驶车辆的飞速发展,智能车辆作为智慧交通系统的一个重要组成部分日益受到重视[1]。运动控制是智能驾驶车辆研究领域中的核心难点之一,智能驾驶车辆能够根据当前周围环境和车体位移、姿态、车速等信息按照一定的逻辑做出决策,并分别控制油门、制动及转向等执行系统,从而实现通过搭载智能控制系统代替人手动驾驶车辆[2]。
智能驾驶车辆不同于人类手动驾驶,精准控制成为智能驾驶的关键,而车辆本身是一个复杂的耦合系统[3],因此,在研究智能车辆运动控制时,构建合理的非线性车辆动力学系统是实现智能车辆自主行驶的重点和难点[4]。
本文建立纵横向车辆动力学模型,基于线性二次型调节器(Linear Quadratic Regulator, LQR)方法控制车辆横向运动,运用比例-积分-微分(Proportional-Integral-Derivative, PID)控制器调节车辆纵向运动,设计期望运动路径,分别对车辆纵、横向运动进行控制分析,并利用Matlab/ Simulink和 Carsim联合仿真验证控制策略的有效性。
1 车辆动力学建模
建立合理的车辆动力学模型是研究智能车辆运动控制的基础。车辆模型包含的自由度和参数越多,模型的精确度就越高,但系统也越复杂。实际研究过程中,可以根据研究目标进行合理假设后再进行建模。
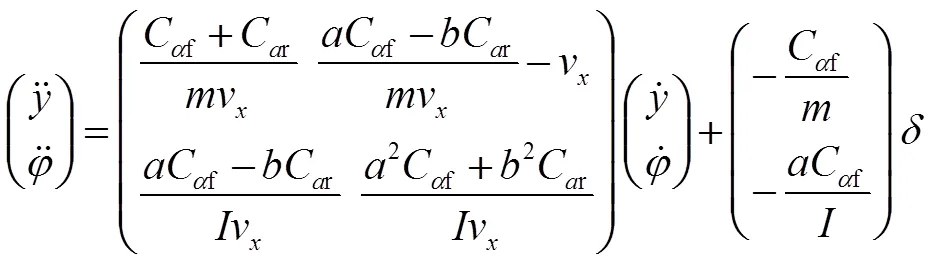
为研究智能驾驶车辆运动特性,探讨车辆纵横向分别控制时,对期望轨迹的跟踪能力,假设车辆前轮转角较小,并且车辆以恒定速度前进,简化车辆模型并进行动力学分析,如图1所示,建立该二自由度车辆动力学微分方程:
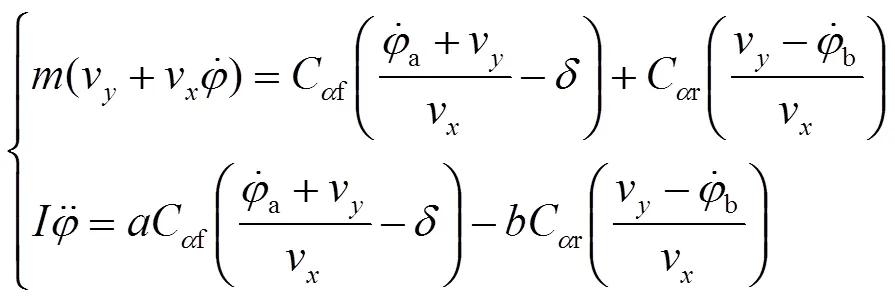
式中,m为整车质量,vy为横向运动速度,vx为纵向运动速度,为车辆横摆角加速度,和分别代表前后轮的横摆角速度,a和b分别代表汽车质心到前后轴的距离,Cαf和Cαr分别代表前后轮的侧偏刚度。
利用建模期吉林省春夏期地面常规气象要素日值进行SOM分析,并将得到的天气模态与逐日降水对应,再将独立检验期地面常规气象要素日值映射到所建立的天气模态与逐日降水之间的关系中,利用蒙特卡罗方法模拟逐日降水量。这里以白城站为例,给出详细图表分析,所有站点的模拟效果分析见4.1和4.2节。
其中,

2 运动分析
2.1 横向运动分析
智能驾驶车辆在运动过程中,根据各类安装在车身的传感器采集的道路、交通环境等信息,经过信息融合,将采集到的数据发送给控制系统,经过控制系统逻辑算法判断后,发送合理的信号给车辆各个执行机构,完成车辆运动控制。
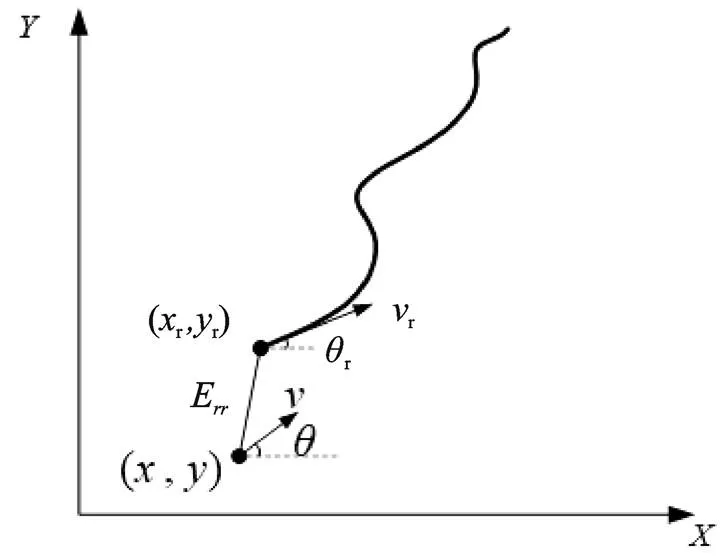
图2 规划路径与车辆实际运动偏差示意图
为提高系统模型的准确度,避免控制算法的滞后性,在车辆实际运动轨迹上设计了预测模块,即控制系统基于外界环境、道路信息以及当前车辆的运动状态进行车辆运动控制,预测车辆当前实际位置与期望路径之间的位移和航向偏差大小,从而控制方向盘转动使预测偏差为零,进而实现对期望路径的跟踪。
其中:pre=+v××cos-v××sin,pre=+v×× cos+v××sinφ,vpre=v,vpre=v,pre=+̇×,̇pre=̇,为预测时间。
因此,对于车辆实际运动轨迹与规划轨迹之间的偏差可以表示为


引入代价函数,则有:
=E2=CE2+2(6)
LQR是一种稳定的控制方法,可利用较小的控制能量使系统状态变量维持在较好的性能指标,同时可以对不稳定系统进行整定,对于车辆运动控制具有突出优势[9]。Matlab控制系统工具箱中提供了LQR设计工具,可以很方便地完成该最优控制器的设计[10]。
根据以上分析,建立智能车辆横向运动控制系统的逻辑框架,如图3所示。
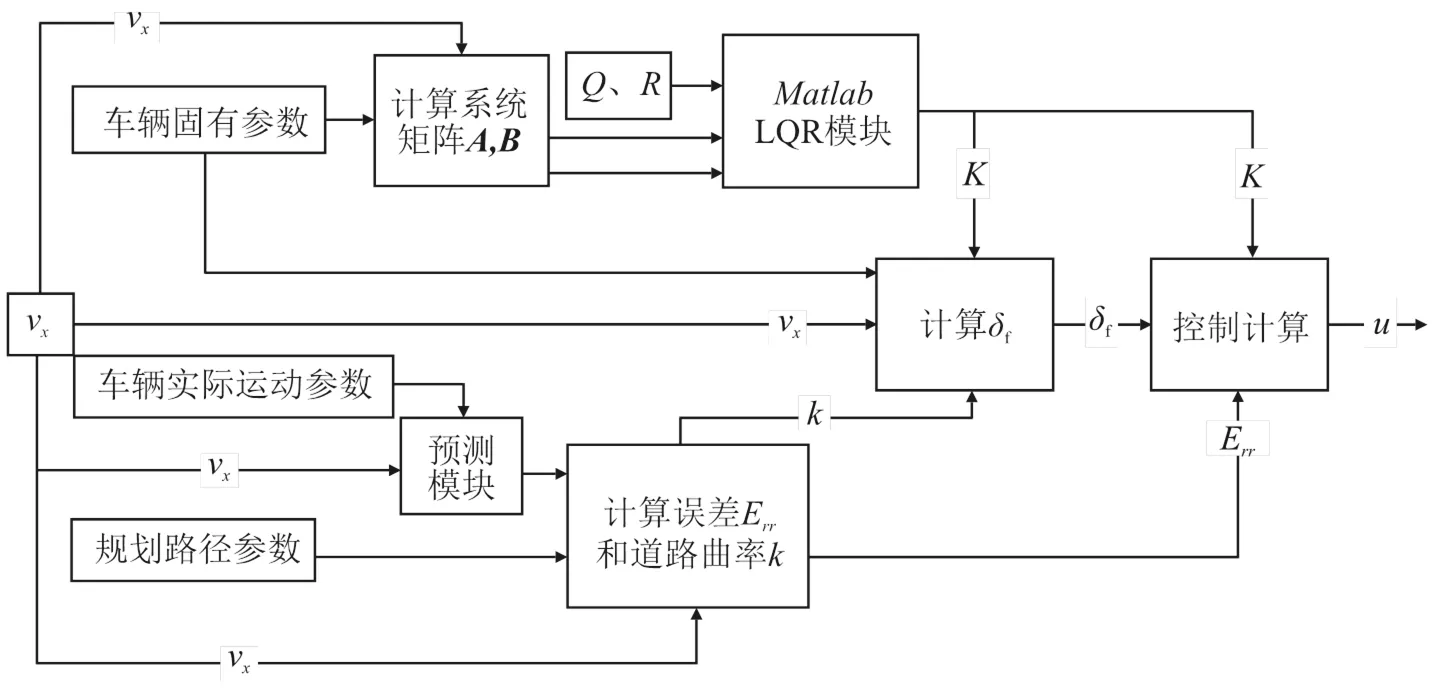
图3 横向运动控制系统逻辑框架
2.2 纵向运动分析
纵向运动控制是智能驾驶车辆自主驾驶的基础,通过控制车辆的驱动或制动系统完成运动,根据期望速度进行准确快速跟踪,实现车辆的加速或减速行驶[11]。
上一节中建立的智能车辆横向运动控制策略的前提是假设车辆以恒定速度运行,然而在车辆实际运动过程中,车辆需要根据实际运动环境以及路况来改变行驶速度。所以,实际车辆的运动速度并非一直保持恒定,因此,单纯的车辆横向运动控制还无法全面地展现智能车辆在实际环境中的行驶状况。
智能驾驶车辆的纵向运动控制,受外界因素干扰较大,并且被控系统具有较强非线性特征,一般的控制方法很难满足智能车辆对于参考路径的迅速准确跟踪。PID控制算法具有简单、实用、响应快的突出优点,把系统的输入量和输出量求偏差,通过偏差的比例、积分和微分来进行线性组合,得到控制量并以此控制被控对象,是实际生产中应用最广泛的控制算法[12]。因此,本文采用PID控制器对车辆模型的速度和加速度分别进行控制,调整设置合理的参数值,实现智能驾驶车辆对参考运动速度和加速度的准确跟踪。
根据以上分析,建立智能驾驶车辆纵向运动控制系统的逻辑框架,如图4所示。
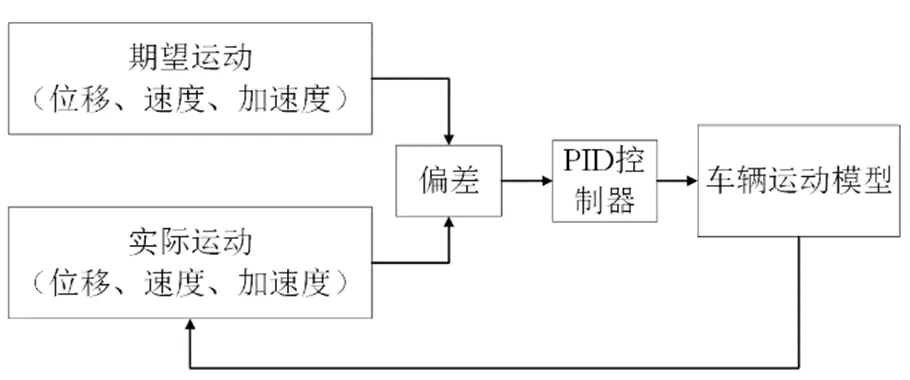
图4 纵向运动控制系统逻辑框架
3 仿真验证
为分别验证智能驾驶车辆纵、横向运动控制系统的控制效果,利用 Carsim 建立车辆运动模型,设置输入输出信号、车辆行驶路面条件等参数。根据数学推导,在Matlab/Simulink中分别建立纵、横向运动控制算法,并进行联合仿真。表1为必要的仿真参数。
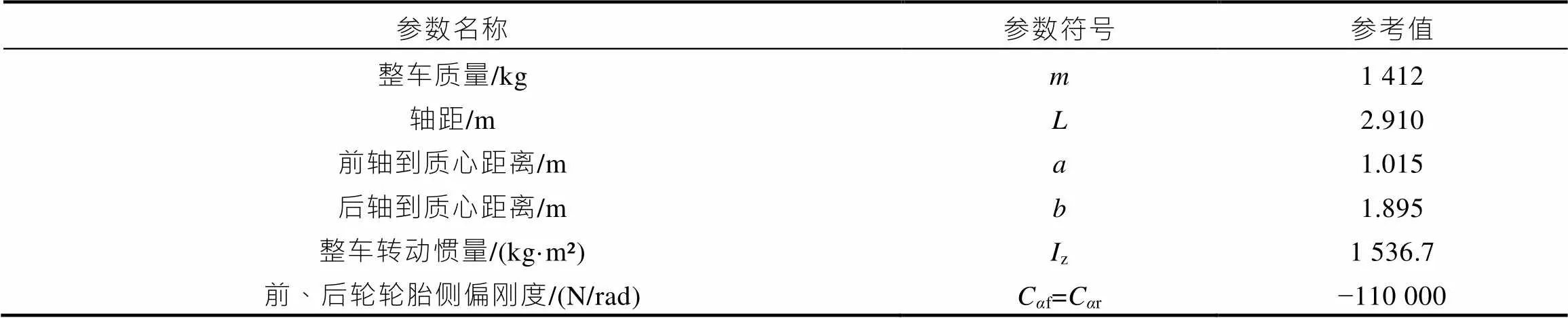
表1 仿真参数
3.1 横向运动控制仿真
智能驾驶车辆横向运动控制仿真,首先在Carsim软件中规划出一条简单的期望路径,如图5所示,在Matlab/Simulink中分别建立LQR算法模块、预测模块、反馈控制模块,然后结合Carsim模型和Matlab/Simulink模型进行联合仿真,建立横向运动控制模型,验证横向控制算法,仿真结果如图6所示。
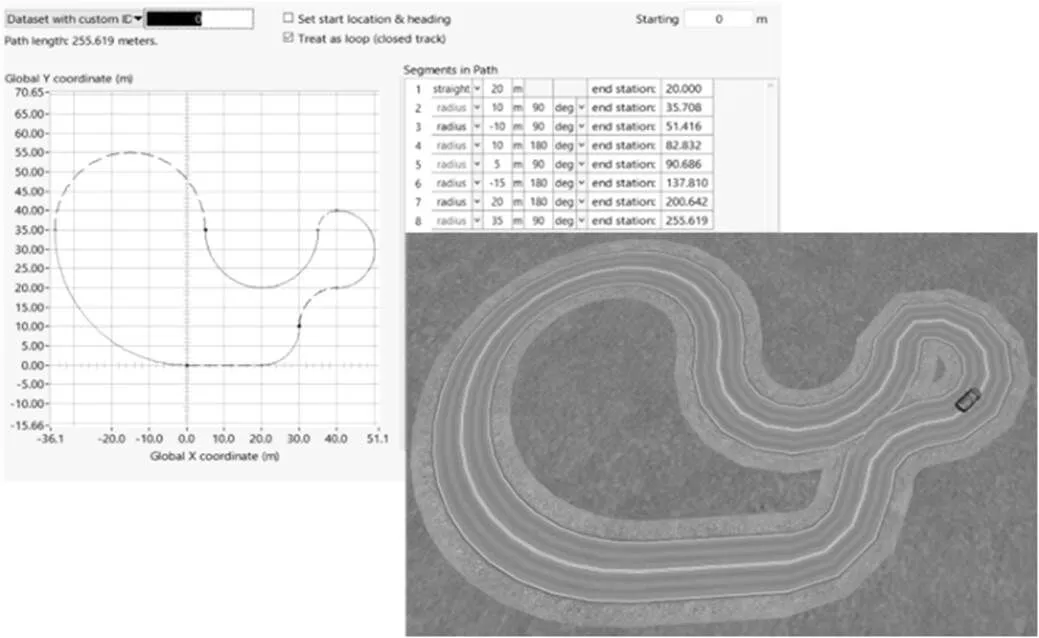
图5 横向运动期望路径
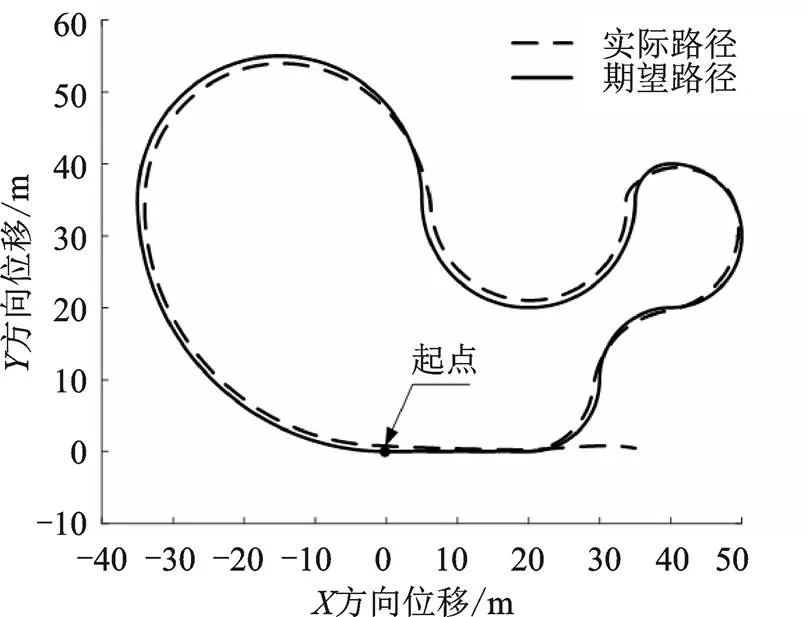
图6 横向运动仿真结果
由图6可知,车辆在控制系统作用下,完成了对期望路径的跟踪。在起始点时,车辆开始做直线运动,车辆实际运动路径与期望路径完全重合,车辆进入弯道时,由于道路曲率发生变化,实际车辆运动轨迹与期望路径之间出现偏差,尤其是道路曲率出现连续变化时,偏差增大,而当道路曲率为定值时,运动偏差基本保持稳定。
3.2 纵向运动控制仿真
智能驾驶车辆纵向运动控制,同样是在Carsim软件中建立车辆模型,并设定此时车辆沿直线运动,在Matlab/Simulink中建立油门和刹车控制模型,设计合理的PID控制器,通过反复测试,确定了PID控制器参数为P=1,d=0.2,然后在Simulink中重新规划了一条随时间变化的期望位移、速度和加速度变化曲线,结合Carsim模型和Matlab/Simulink模型建立纵向运动控制模型,进行仿真,验证纵向控制算法,仿真结果如图7所示。
图7(a)记录了从开始仿真到车辆停止时仿真车辆纵向运动的位移变化曲线,结果显示PID控制的车辆位移与期望的位移曲线基本一致,并且在起始阶段和停车阶段都表现出良好的位移变化速度的跟踪能力。如图7(b)所示,规划的车辆纵向速度从0时刻开始加速,到30 s时速度逐渐降低,直到车辆停止运动,实际车辆运动速度与规划的理想运动速度基本保持一致。图7(c)中显示的是车辆加速度变化曲线,在车辆起步加速阶段,由于惯性导致的加速度突变,实际车辆加速度与规划曲线之间产生了较大的偏差,随后通过PID控制器调节,加速度很快趋于稳定,第10 s时由于加速度突然变化,导致实际运动与规划曲线之间产生了较大的偏差,随后经过PID控制器调节,最终实际加速度与规划加速度基本保持一致,直到车辆停车。
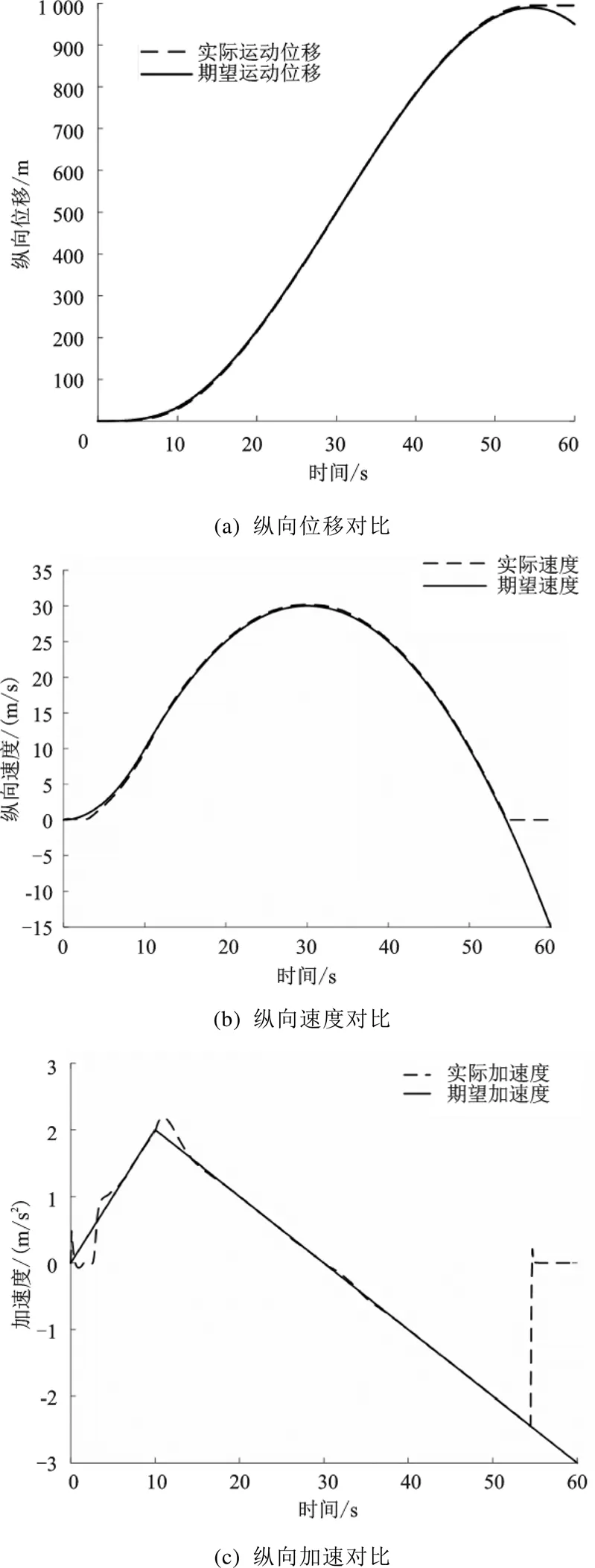
图7 纵向运动控制仿真结果
4 结论
本文通过合理假设,建立了二自由度智能驾驶车辆纵、横向动力学模型,分别讨论了车辆纵向和横向运动特点,针对纵、横向运动控制建立不同的车辆规划路径,分别运用LQR方法和PID控制系统对智能车辆横、纵向运动进行控制分析。在设计控制系统时增加了预测模块,控制系统会根据当前车辆路径预测下一秒车辆的运动轨迹,从而提升车辆运动控制效果,使车辆的加速、刹车更加柔和平顺。联合Carsim和Matlab/Simulink进行了仿真验证,结果表明,两种控制方法对于车辆纵、横向运动控制具有良好的控制效果。
经过仿真可以看出,智能驾驶车辆运行时,规划路径和规划速度很大程度决定了车辆行驶的平顺性,尤其是在复杂路径下,良好的运动控制是车辆平稳运行的关键。因此,设计自动驾驶车辆运动控制策略时,既要考虑车辆对于规划路径、规划速度的准确跟踪,同时要兼顾车辆行驶稳定性和平顺性。本文通过仿真研究,验证了纵横向两种不同的控制方法的有效性,同时也为设计自动驾驶车辆纵横向运动控制策略提供了参考。
但同时需要关注的是,为便于仿真,本文对车辆动力学模型进行了合理假设,因此,会导致仿真结果与实际有所偏差,算法的有效性还需要进一步在试验中验证;其次,对于自动驾驶车辆,其路径规划是一项严格的任务,本文只是利用仿真手段获取了一段理想的道路曲线,因此也会对仿真结果造成影响,在后续研究中需要完善。
[1] 郭景华,李克强,罗禹贡.智能车辆运动控制研究综述[J].汽车安全与节能学报,2016,7(2):151-159.
[2] 熊璐,杨兴,卓桂荣,等.无人驾驶车辆的运动控制发展现状综述[J].机械工程学报,2020, 56(10):127-143.
[3] 杨柳.高速车辆纵横向动力学耦合控制研究[D].重庆:重庆大学,2006.
[4] 郭景华,罗禹贡,李克强.智能车辆运动控制系统协同设计[J].清华大学学报(自然科学版),2015(7):761-768.
[5] 王浩.基于横向与纵向综合控制的智能车辆运动控制研究[D].南京:南京航空航天大学,2016.
[6] 高琳琳,唐风敏,郭蓬,等.自动驾驶横向运动控制的改进LQR方法研究[J].机械科学与技术,2021,40(3): 435-441.
[7] 尹智帅,何嘉雄,聂琳真,等.基于优化算法的自动驾驶车辆纵向自适应控制[J].系统仿真学报,2021,33 (2):409-420.
[8] 郭璧玺,王伟,陶小松,等.考虑驾驶员特性的智能车辆纵向车速跟随控制策略[J].机械科学与技术,2021,40(5):694-700.
[9] 冯健.基于LQR算法的列车自动驾驶系统最优控制研究[D].成都:西南交通大学,2014.
[10] 习慈羊,黄文韬,吴浩苗,等.基于人车路模式的汽车主动悬架LQR控制及MATLAB仿真[J].汽车实用技术, 2019,44(11):72-74.
[11] 陈天任,段敏,刘振朋.汽车智能巡航纵向控制方法与仿真研究[J].辽宁工业大学学报(自然科学版),2018, 38(6):391-395.
[12] 陆军.基于PID和LQR控制的两轮自平衡小车研究[D].重庆:西南交通大学,2012.
Simulation Research on Longitudinal and Lateral Motion Control of Intelligent Driving Vehicles
TAN Haixin
This paperanalyzed the longitudinal and lateral motion characteristics of intelligent driving vehicles, made reasonable assumptions, and established longitudinal and lateral vehicle dynamics models. Set the desired trajectory of the longitudinal and lateral movement of the vehicle separately, control the lateral movement of the vehicle based on the linear quadratic regulator (LQR) method, and use the proportional-integral-derivative (PID) controller to adjust the longitudinal movement of the vehicle. Combine Carsim software to establish vehicle motion model, and establish vehicle longitudinal and lateral control algorithms in Matlab/Simulink. After simulation analysis, the vehicle longitudinal and lateral motion control algorithm has a good control effect, which makes the simulated vehicle track the expected motion trajectory well.
Intelligent driving; Longitudinal and lateral motion; Linear quadratic regulator; Proportional-integral-derivative controller; Carsim; Matlab/Simulink;Vehicle motion model
U495
A
1671-7988(2022)24-46-06
U495
A
1671-7988(2022)24-46-06
10.16638/j.cnki.1671-7988.2022.024.008
谭海鑫(1993—),男,硕士,助理工程师,研究方向为自动驾驶仿真,E-mail:839222068@qq.com。