基于双曲正切函数的滑模观测器研究*
2023-01-06杨光永徐天奇黄卓群
刘 叶 杨光永 徐天奇 程 满 黄卓群
(云南民族大学电气信息工程学院 昆明 650500)
1 引言
在永磁同步电机矢量控制系统中,一般采用传感器来检测转子位置和转速,但传感器的安装会使系统成本增加,影响系统的可靠性与鲁棒性。因此永磁同步电机无位置传感器控制系统成为了研究的热点[1~3]。
永磁同步电机的无传感器控制可以分为两类:零低速无传感器控制和中高速无传感器控制。控制方法主要有高频注入法[4]、模型参考自适应法[5]和滑模观测器法[6]。目前,主要的研究方向还是削弱滑模观测器的抖振[7]。文献[8]针对基于sigmoid函数的传统滑模观测因为高频信号切换导致的抖振问题,提出了采用分段指数型函数代替原滑模观测器中的开关函数,提高了系统的性能和稳定性。文献[9]利用新型反正切饱和函数减小系统的抖振,设计了比例积分观测器来克服扰动对转速的影响,提高了系统鲁棒性。文献[10]将低通变截止滤波器与卡尔曼滤波器结合成级联滤波器,有效降低测量噪声及误差,提高了控制系统的静动态性能。文献[11]提出一种新的滑模观测器,根据反电动势模型建立观测器,省略了低通滤波器和相位补偿模块,提高了估计精度。文献[12]为减小位置观测误差,设计了基于反电动势模型的正交锁相环转子位置观测器。文献[13]在设计滑模观测器时引入速度和角度作为状态变量,不再仅以电流量作为观测对象,提高了系统的稳定性。文献[14]将卡尔曼滤波与滑模观测器结合,减小了抖振,并加强了系统稳定性和跟踪性。文献[15]提出了一种带有反电动势修正的滑模观测器无速度传感器控制方法,使电机在速度波动时也能将位置误差收敛为零。
针对系统抖振和转子估算精度问题,本文提出一种采用tanh(x)函数为开关函数的滑模观测器,并加入反电动势观测器和锁相环,最后通过仿真验证该策略的可行性。
2 数学模型
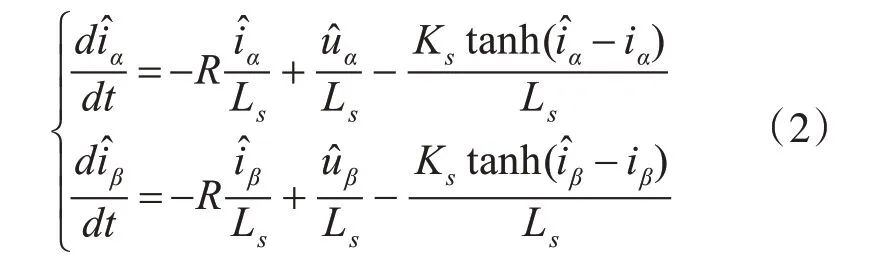
永磁同步电机是一个具有多变量、强耦合特点的非线性系统,构建αβ坐标系下的PMSM模型如下:

式中,iα、iβ为两相静止坐标系下的定子电流;uα、uβ为两相静止坐标系下的定子电压;R为绕组的等效电阻;Ls为PMSM的等效电感;eα、eβ为两相静止坐标系下电机的反电动势。
3 双曲正切滑模观测器
本文提出的滑模观测器采用双曲正切函数tanh(x)代替原来的切换函数,其数学模型为
由于在传统滑模观测器中,低通滤波器不能消除测量噪声Δμ,导致估算的转子位置信息和速度不够精确。所以在原有的低通滤波器后加上具有卡尔曼滤波效果的反电动势观测器。假设经低通滤波器估算的反电动势为,则反电动势观测器输入方程为

构造具有卡尔曼滤波效果的反电动势观测器方程如下:

在传统滑模观测器中通过式(5)、式(6)来估算转子位置,这会将一些谐波分量引入计算中,从而造成较大的误差。

为此本文在滑模观测器中引入PLL系统,简化转子位置的求取。PLL原理图如下所示。
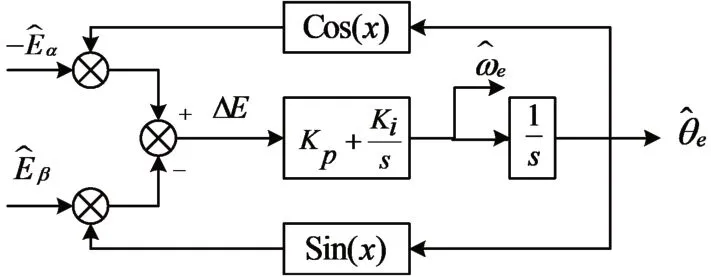
图1 PLL原理图
反电动势估算值可以表示为

综上所述,基于双曲正切函数的滑模观测器结构图如图2所示。

图2 基于双曲正切函数的滑模观测器结构框图
4 稳定性分析
在基于双曲正切函数的滑模观测器的控制系统中,应用Lyapunov稳定性判据对系统稳定性进行分析。Lyapunov函数如下:

对式(8)求导得:

将式(1)~式(2)代入式(6)后可以得到:

根据稳定性条件,必须满足:

又已知s正定,则

则需满足:

不等式恒成立。经计算,当满足式(14)时,滑模观测器趋于稳定。

5 仿真分析
为了验证提出的滑模观测器的可行性,在Simulink中搭建PMSM的矢量控制模型,改进的滑模观测的仿真模型如图3所示,实验中电机参数设置如表1。仿真条件设置:直流侧电压Udc=311V,开关频率10Hz,采样周期Ts=10 μs,并在0.05s时突加5N·m的负载。

图3 基于双曲正切函数的SMO仿真模型

表1 电机参数及值
令电机空载启动,初始给定转速为1000r/min,基于sigmoid函数的传统滑模观测器与基于双曲正切函数的滑模观测器的PMSM矢量控制系统的仿真结果如图4~5所示。图4和图5可看出,在电机启动阶段,本文基于双曲正切函数的滑模观测器能够更加快速地稳定在给定的转速,而且超调量更小,调节时间更短。在转矩突变时,转速变化更小。
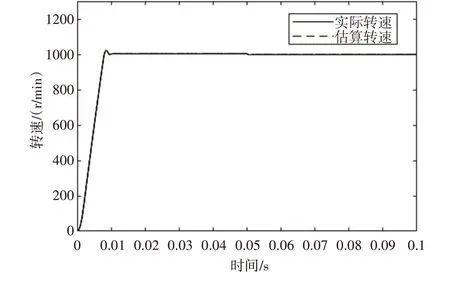
图4 基于tanh(x)函数的滑模观测器转速变化

图5 基于sigmiod函数的滑模观测器转速变化
图6是基于两种滑模观测器的控制系统的转速误差,通过基于sigmoid函数的传统滑模观测器得到的转速误差抖振较大,而经过改进的滑模观测器,抖振削弱,误差更小,而且在转矩突变时,转速误差变化更小。两种方法的动态性能见表2。

图6 转速误差对比图

表2 两种方法的对比
图7为位置角误差,可以看出原滑模观测器采用反正切函数除法运算求得的角度与实际角度还是存在一定误差,但改进的滑模观测器引入锁相环后基本消除了抖动,而且进一步减小误差,提高了系统转子位置估计的精确度。
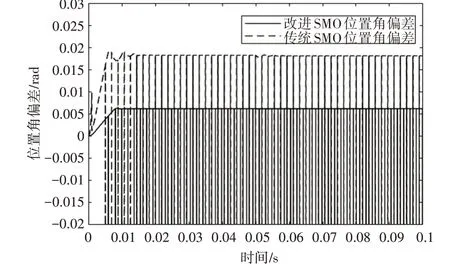
图7 位置角误差对比图
6 实验平台
为验证本文滑模观测器的可行性,在如图8所示的实验平台上进行实验。平台以Ti公司的TMS320F28069MPZT芯片为控制核心,硬件部分包括控制电路、驱动及逆变电路、电压和电流信号检测电路、控制电源以及保护电路等,在CCS5.5软件开发环境下进行模拟仿真。
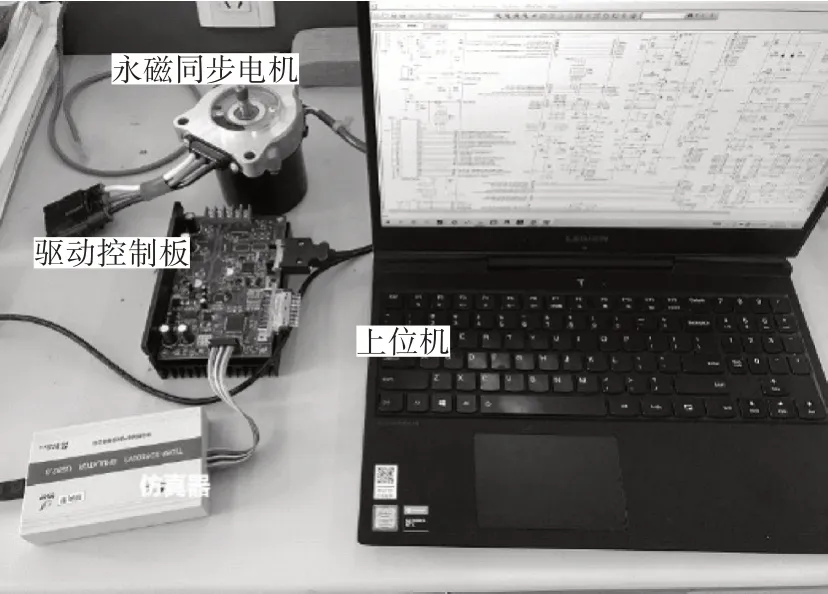
图8 实验平台
通过实验对比传统滑模观测器,改进的滑模观测器在电机速度达到稳定值后转速误差更小,并且转子估计误差也可以控制在10°以内。因此实验表明,本文的滑模观测器具有更好的观测性能。
7 结语
本文在研究传统滑模观测器后,采用tanh(x)函数作为新的开关函数,削弱了系统抖振,并在低通滤波器后加入卡尔曼滤波器,更好地消除高次谐波和测量噪声,并且应用锁相环PLL技术,简化了转子转速和位置角估算,提高滑模观测器的性能。最后,通过动态仿真分析验证了该控制策略的可行性和有效性。
