基于视频AI识别的智能变电站安全智能巡视方法研究
2023-01-05陈超人冉梦东郜晓娜陈家辉
陈超人 冉梦东 郜晓娜 田 地 陈家辉
(贵州电网有限责任公司遵义供电局)
0 引言
电网规模扩大,变电站运行方式也需要升级,建设智能的变电站是构建智能电网的重要环节。稳定的电力运行是保证社会经济建设的重要环节,这与人们的日常生活息息相关,而变电站的相关仪器是保证电能损耗正常运行、提高电力使用效率的关键一环[1]。户外变电站与电网运行是当下需要关注的重点,若日常的维护工作没有跟上进度,变电站的设备就会出现故障,影响整体电网系统运行。为了减少变电站发生事故的概率,平日巡视的环节就异常重要。数据集成以及无人化的自动巡视技术是智能变电站现在配备的标准应用。视频识别的AI技术可以应用在智能变电站的安全监控,在变电站实际工程中智能的AI技术也可以抵抗恶劣天气环境造成的干扰,智能变电站巡视方法可以针对特定场景制定AI智能化方案[2]。视频AI识别主要是根据变电站设备巡视要求进行操作,利用高清传感器将巡视的视频传输到后台,后台处理并记录巡视的数据,若是监测到异常情况则发出警告。视频AI识别的巡视监测,可以清晰地处理收录的视频图像信息点,并针对目标进行进一步的分析,最后将分析的数据传到总部,达到巡视的目的。
1 智能变电站巡视方法
1.1 视频图像采集及预处理
变电站的气压表指针以及开关刀闸分合闸等细小的变化就能引发安全问题,若想通过远程监控进行巡视的安全检查,就需要提前对目标进行视频采集。视频采集是智能变电站安全巡视的首要任务,以变电站的气压表为例,视频采集需要录入气压表盘的信息,将表盘变化通过智能化的技术显示出来[3]。通过摄像头获取的视频是BGR色彩组成的多个图像叠加的,这些彩色视频的像素点主要由红色、蓝色和绿色构成。采集的彩色图像的每个像素点的图像信息由于叠加的通道色阶增加了视频处理的难度,因此需要在摄像头对视频进行一系列的图像采集后集中灰度化处理。灰度化处理能将红绿蓝三色通道信息转换为黑白信息,剔除彩色颜色特征的图像会减少图像处理的运算量。色彩图像转化为单通道灰度化的操作一般选择最大值法测定,具体的计算公式如下:

式中,Gray(i,j)表示采集视频相关图像的灰度值;R表示摄像头采集的视频红色通道数值;G表示采集彩色视频图像的绿色通道数值;B表示采集彩色视频图像的蓝色通道数值。三种通道的最大值为采集图像的灰度值,但这样处理得到整体灰度也会偏大,容易丢失细节,因此需要对采集视频目标进行前景提取[4]。针对摄像头采集的变电站的表盘视频,确定具体表针指向表盘的相关数据,剔除其他干扰背景,本文采用的视频图像分割,是将视频图像的前景和背景进行切割,得到高精度的前景图层。视频的边缘分割,主要是根据视频图像的某些特征划分出相似点和不同点,一般来说,灰度值的边缘检测是图像边缘分割的首选。图像边缘分割选取视频图像中心点像素点,设定水平方向和垂直方向,以网格形式得到对应的亮度差分相近值[5]。动态视频图像灰度化处理的每个关键帧都进行边缘切分的操作后,才完成对变电站巡视视频图像的预处理。
1.2 AI识别目标及目标匹配
经过上述视频图像预处理后,对预处理后的目标进行分析。目标分析的关键是将变电站所有的设备都要一一识别出来,并标注出设备所在的位置和状态。视频AI识别可以在视频中找到目标并进行分类,视频AI识别在对目标进行分析时,通过综合的摄像头点位将目标进行全覆盖,检测到变电站的各个开关,再对巡视的点位进行循环的巡视,视频AI识别目标监测只需要一次扫描就能完成目标的分析。视频AI识别结合特征网络提取目标,特征网络框架如图1所示。
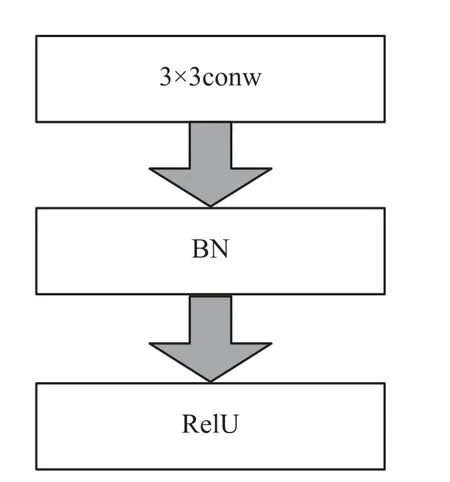
图1 AI特征网络框架
整个卷积神经网络共分为三部分,分别为3×3卷积层、BN激活层和RelU池化层,最终输出神经网络的分类结果。视频AI识别网络通过不断地深度学习完成对目标的识别,具体如下:卷积层结构对输入的视频完成特征提取,在卷积结构中确保AI视频提取的各层的关键点的尺寸相同,这是为了前一层的输出与后一层输出的向量,各个变电站特征图像或者输入的视频进行右移运行,设置移动窗口向右移动和向下移动的步幅进行卷积的操作。每一层的深度必须和上一层输出视频数据的深度保持一致。进行此层操作还需设置激活层,所有的输出AI运算使用相应的激活函数[6]。在神经网络结构中如果不使用激活层,输出的信息只有线性的变化,也就失去意义。通过激活层的使用,可以使视频AI神经网络能够理解复杂的和非线性的数据信息,使网络增加非线性的特性。池化层主要进行输出维度的缩小和冗杂信息的去除。对数据进行特征提取之后,此层会对提取之后的数据进行维度的缩小,完成对视频特征的压缩以及简化。在卷积输出的特征图上根据指定的池化窗口选择窗口中数据最大值,然后滑动窗口再继续选择下一个窗口最大值,并且保留网络结构模型的复杂度。再提取到输入数据高层的语义信息,此层将优化的视频特征得到的信息反馈到前台,完成对视频提取到的目标点信息进行分类[7]。
提取完视频的特征点,为了区分特征点的特性,每个特征点的对应向量描述也就是视频目标象征点的关键,以变电站的表盘为例,表针的走动角度就是变电站仪表的特征点。特征点的方向和大小通过小波响应表示出来,小波滤波器示意如图2所示。
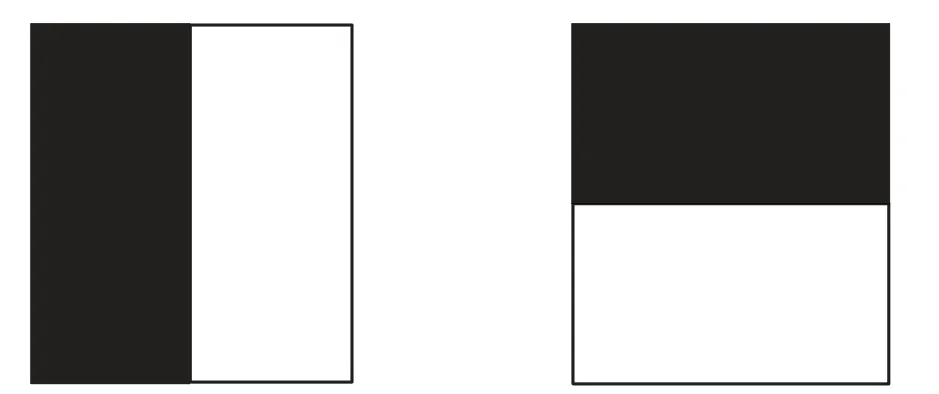
图2 小波滤波器模板示意图
黑色数值为-1,白色数值为1,这两个滤波器分别计算小波响应,计算小波响应合成水平强度和竖直强度,并生成一张小波响应的点位图。点位图以扇形窗口形式进行滑动,扇形图层涵盖视频特征点主方向。确定主方向后,需要在特征点周围提取像素变化的趋势,根据像素点变化情况匹配特征点[8]。
特征点是否匹配,这需要计算描述向量的差异大小。匹配算法采用欧式距离衡量方法,欧式距离放置在二维和三维坐标系中,主要是判断坐标点直线物理距离的变化情况。对于特征向量DESa和DESb来说,欧式距离计算公式如下:

为保证特征点匹配的准确性,算法加入了参数,具体如下:
式中,d1为待检测视频图像特征点欧式距离最小的点;d2为待检测图像距离第二小的点。当两个点距离的比值大于一定值,两个特征点没有明显的联系,算法不会匹配。相反,两个特征点在一定范围值之内,才看作匹配成功的特征点。实际应用的范围值在0.4~0.6之间。
完成特征点匹配后,将视频图像特征点的匹配坐标代入式(4)中:
式中,[x y1]和[x'y'1]分别为监测视频仪器图像和特征点匹配特征点的坐标;H是透视矩阵,通过这个矩阵将映射的关键点坐标[h11h12h13]等投入到待匹配的变电站视频表盘图像上,以此完成整体特征点匹配的工作。
1.3 反馈巡视的数据信息
在实现变电站视频图像处理和目标特征点匹配后,需要将巡视到的数据反馈到主机上,方便工作人员对变电站进行后期的管理和维护。变电站管理主控室集中一台服务器,要远程管理多个设备,由于智能变电站视频采集的关键帧的数量较多,内部信息占据内存过大,为了避免平台崩溃,出现数据漏洞,反馈巡视数据信息要在无操作情况下让传输基本保持休眠状态。除此之外,还需要对视频AI识别的持久数据层进行备份处理,即使后期平台出现故障,也能够保证后备数据的查询。这样的处理,让变电站的巡视数据可以完整运行,从视频图像采集到目标获取之间实现科学的整合,提高变电站整体巡视信息运输效率,完成智能巡视服务的目标。
2 对比实验
为了验证新设计的基于视频AI识别的智能变电站巡视方法的有效性,测试变电站在传统方法和结合视频AI识别技术方法所耗费的时间。哪种方法所耗时间越少,证明哪种方法的效率就越高。
2.1 实验准备
基于视频AI识别的智能变电站内测需要部署在不同智能网关平台上,具体配备的硬件环境如下表所示。
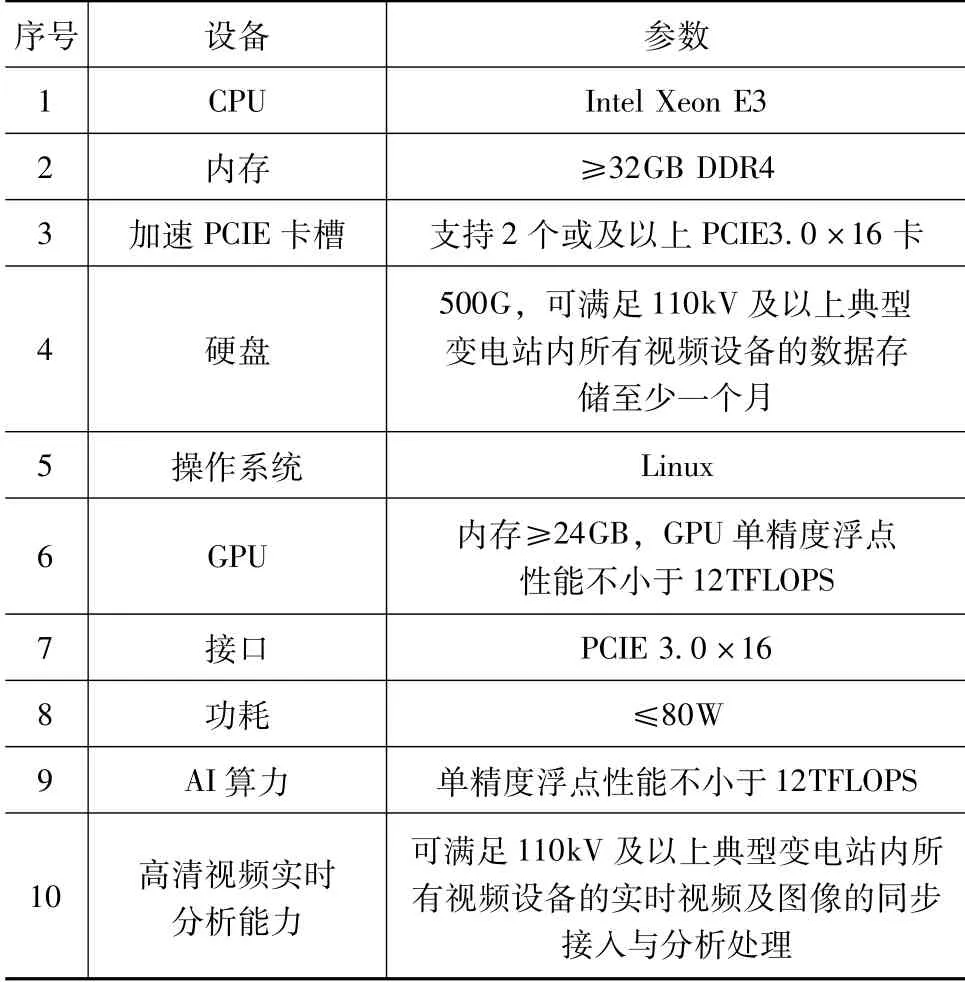
表 智能变电站网关硬件环境
测试的变电站与使用AI的相关电缆进行对接后,实现并网和后续的测控。
2.2 实验结果
为了验证所设计的方法的有效性,选取相同的变电站进行多次实验,测试两种巡视方法的所耗时间,具体的实验结果如图3所示。
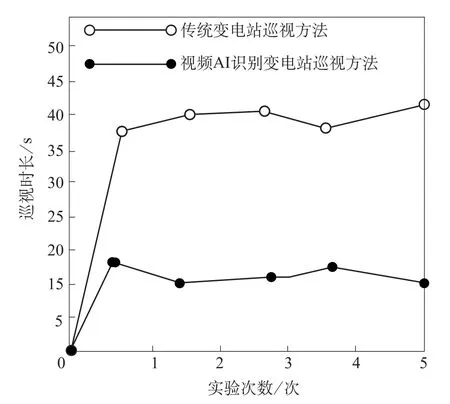
图3 实验对比结果
如图3所示,结合视频AI识别的智能变电站安全巡视方法所耗时间不超过20s,比传统方法所耗时间减少了1/2。因此得出结论,新设计的基于视频AI识别的智能变电站安全巡视方法更有效率,可以应用在实际的变电站巡视环节中。
3 结束语
本文主要利用视频AI识别技术完成针对变电站的智能巡视。视频AI识别技术可以快速对巡视的视频图像进行处理,通过AI算法抓取目标关键点并对目标的关键点进行匹配,极大地提高了巡视处理的时间。尽管本文作者受到学术水平的限制,提出的操作性观点还需要进一步优化,但还是希望本文设计的针对智能变电站的巡视方法可以应用到实际中,提升变电站巡视的效率。
