改进模糊算法的六足机器人自主导航研究
2022-12-30赵章焰张瑞东
赵章焰,张瑞东
(武汉理工大学物流工程学院,湖北 武汉 430063)
1 引言
六足机器人相较于轮式、履带式等机器人具有更强的移动灵活性和地形适应能力,在科研、探险和勘测等领域具有较强的发展潜力,而自主导航是六足机器人的关键研究方向之一。六足机器人的自主导航指在未知地形环境探索一条从初始位置到终点位置的无碰撞安全路径。其中避障是六足机器人自主导航的功能之一,决定了六足机器人是否可以安全到达目标位置。
六足机器人较强的地形适应能力使得其可以在崎岖地形移动,较强的灵活性使得其能够针对不同地形选择恰当的位姿和落足点[1]。当六足机器人航向为可跨越障碍物时可以越障,当遇到不可跨越障碍物时,若不及时进行避障则无法安全移动。因此,对六足机器人跨越障碍物、获取障碍物高度信息能力的研究显得尤为关键。六足机器人的运动本质上是六条腿交替组合支撑和摆动的往复过程[2]。
因此对单腿足端运动学分析尤为重要。基于单腿足端运动学分析,求解出足端工作空间,采用复合摆线作为足端运动轨迹,由此计算得出的越障最大高度将作为六足机器人移动方式选择的重要参考。采用双目视觉图像尺寸测量的方法来获取障碍物高度信息,该方法使用双目相机拍摄航向障碍物,获取左右相机对应的两张图片,获取障碍物顶部和底部匹配点并根据视差计算测量点的空间位置,准确地测定被测点之间的距离,即障碍物的高度信息[3−4]。
针对于六足机器人面对不可逾越障碍物的避障问题,模糊控制算法、遗传算法和神经网络等诸多智能算法用于解决机器人避障问题。遗传算法在应对大量数据时,代码实现困难,硬件要求高;神经网络拥有较强的自组织能力但需要精确信息作为输入。而模糊控制算法使用模糊语言,结合专家经验实现自主导航,对运算能力要求不高,在机器人避障领域应用较多[5−6]。
因此提出一种基于改进模糊算法的控制系统,其相较于传统机器人模糊算法控制系统,增设障碍物高度信息作为算法输入量,提高了算法对于六足机器人的适用性。
V−REP是一种可实现复杂场景、多种传感器和多执行器运行的3D机器人仿真软件[7],最后利用V−REP仿真软件建立仿真环境并对该改进算法进行检验。经过仿真得出,六足机器人能够完成无碰避障,并有效提高了移动速度。
2 机器人的越障能力分析
六足机器人若要完成从起始点至终点的路径最优解,需要对障碍物的大小进行获取,进而决定越过障碍物或避开障碍物。为了保障机器人能够顺利地越过障碍物,首先需要对其越障能力进行分析,包括其单腿运动学分析及越障最大高度的求解,其中越障高度的求解为后续机器人路径选取提供了参考。
2.1 机器人单腿运动学分析
与其他类型机器人不同,六足机器人依靠所有支撑腿的关节变换完成指定运动。六足机器人的越障过程是六条机械腿交替完成越障,所以对单条腿的越障能力进行分析即可完成对整个机器人越障能力的评估。设定单腿D−H坐标系,并求出单腿各部分的空间坐标,是完成越障能力评估的条件。建立六足机器人单腿D−H 坐标系,Ob-XbYbZb为躯体中心坐标系,O0-X0Y0Z0、O1-X1Y1Z1、O2-X2Y2Z2、O3-X3Y3Z3分别为各关节和足端运用D−H方法设定的空间坐标系[2],其中Zb和Zo同向,如图1所示。

图1 单腿坐标系Fig.1 Single Leg Coordinate System


六足机器人的结构参数,如表1所示。结合式(1)足端轨迹方程,以足端坐标为坐标系参数,求得足端工作空间(单腿足端相对于原点O0可到达的位置),坐标O-XYZ与O0-X0Y0Z0为同一坐标系,如图2所示。六足机器人的足端移动范围决定了其能否跨越指定障碍物。对六足机器人单腿位置运动学分析为了解机器人越障能力和进行足端越障轨迹规划提供了理论支撑[2−9]。

表1 单腿结构参数Tab.1 Single Leg Structural Parameters
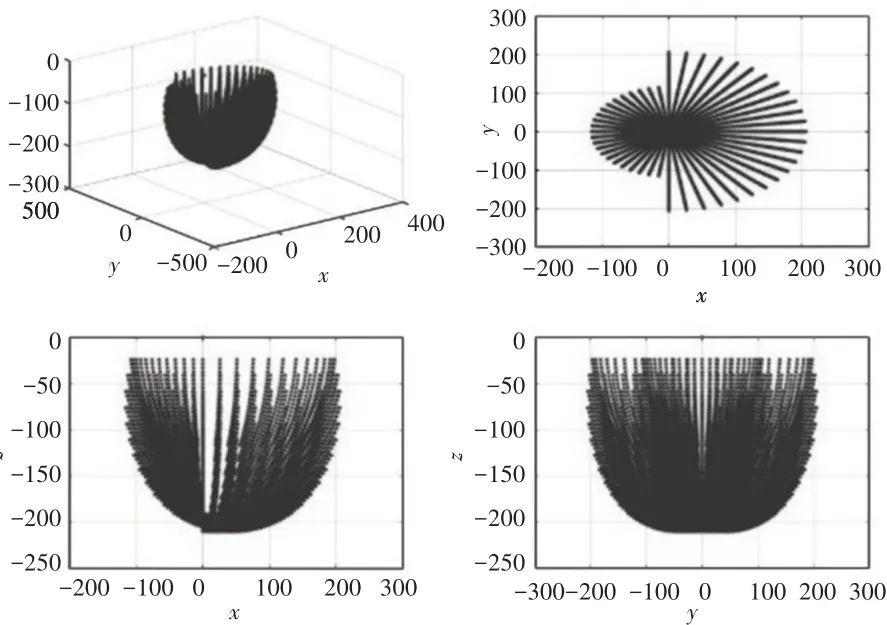
图2 足端坐标空间Fig.2 Foot Coordinate Space
2.2 单腿足端轨迹规划
六足机器人变换三种腿部运动参数仰起高度、跨越距离及跨越时间来调换移动形式,而足端轨迹决定了腿部运动参数,进而影响越障能力。在越障的情况下,足端按照一定的运动轨迹逾越纵向距离h的障碍物完成摆动相,接着足端稳定支撑躯体,完成一个周期运动后又回到躯体的相对原始位置。
足末端运动曲线决定了能否顺利越过越障碍物,因此首先规划运动曲线。选取预设曲线作为足端运动轨迹是常用的方法,如摆线、抛物线、正弦线等,需要完成:①各关节及足末端轨迹平滑;②处于前后极限处,各关节及足末端速度和加速度是零;③足末端的加速度及速度在移动中连续无突变。由单腿跨越障碍物及整机稳定性的要求,选取基于摆线的运动方式规划足末端越障轨迹。以足端开始位置原点O建立运动轨迹坐标系O-XYZ,使用X(t),Y(t),Z(t),分别代表在行进方向、横向和纵向,足端坐标关于时间的函数,则足端轨迹方程为:

经求得,最大步高Hmax的值约为181.86mm,设定支撑宽度为180mm,摆动相周期为4s,步长为150mm。求出在摆动相内的足端轨迹,如图3所示。

图3 足端轨迹曲线Fig.3 Foot Trajectory Curve
六足机器人需要逾越障碍物的尺寸大小只需在轨迹曲线与X轴所围成的范围内即可完成跨越。在后续仿真实验中,选定在X向障碍物宽度为100mm,由足端轨迹曲线可得出,六足机器人能够逾越100mm宽度、纵向高度156.78mm障碍物。
3 六足机器人避障模型
3.1 环境和位置信息的获取
为实现六足机器人避障功能,机器人需要具备感知环境信息和位置信息的能力。距离信息采集选择超声波扇形扫描测距法,在转动平台放置单个超声波传感器,控制舵机完成大角度转动测距[10]。双目摄像机可得到环境三维数据并完成地形构建,完成对障碍物尺寸的识别。
超声波传感器在六足机器人前端,每次旋转30°,测量7个方位的距离值,对所有测量方位编号为1~7,如图4所示。对六足机器人使用GPS获得实时位置及目标位置信息,使用电子罗盘实时测量航向角信息。

图4 距离测量方位Fig.4 Distance Detect Locations
3.2 六足机器人避障分析
六足机器人在坐标系中避开障碍物,并保持向最终位置移动的方位,如图5所示。六足机器人在t−1时刻的位置为(X(t−1),Y(t−1)),目标点坐标为(Xg,Yg),t时刻所处的坐标定为(X(t),Y(t)),t时刻坐标同目标坐标的夹角由θg(t)表示[10]:
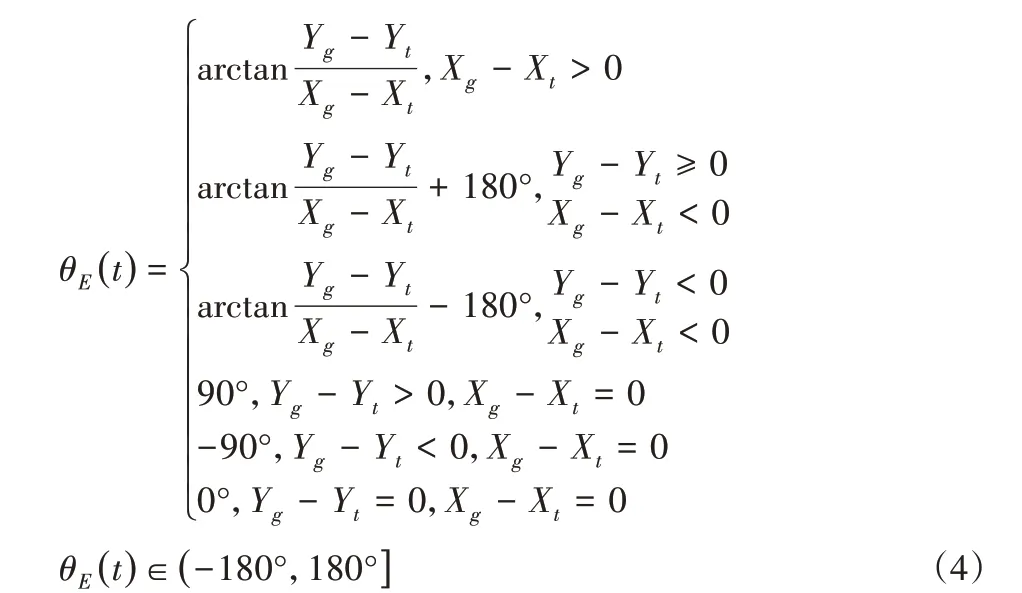
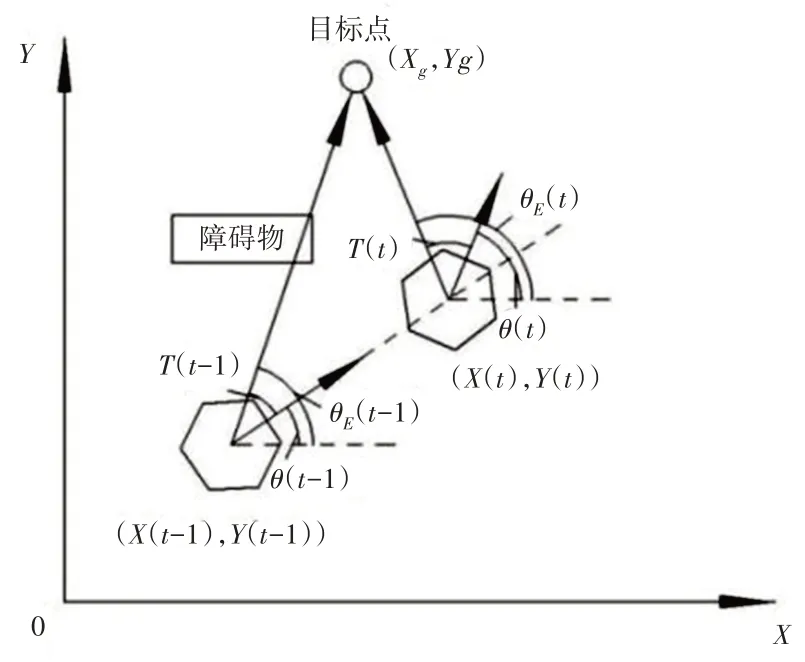
图5 机器人避障模型Fig.5 Robot Obstacle Avoidance Model
(t−1)时刻六足机器人,航向角设定θ(t−1),则t时航向角是θ(t)。t时刻机器人目标夹角T(t)为:

3.3 避障安全性分析
采用虚拟包络机体的安全分析方法,利用传感器获取的环境距离信息,计算得出最大许可避障航向角,完成安全性能的评定。六足机器人传感器探测的方向为七个均等分布方向,为了使得机器人获得前进方向更准确的环境信息,机器人在D4上探测方向与前进方向一致。
由于六足机器人的对称结构决定了可使用范围包络的方法限制机器人的对大边缘范围,防止与障碍物发生碰撞。安全性能评定可分为如下过程:
(1)基于机器人运动学分析,以躯体重心为圆心,最大足端距离为半径r,并设置安全范围ε,即圆形包络边界的半径为r+ε,建立虚拟包络机体模型,如图6所示。
(2)比较七个位置的距离数据,D5、D6是测量得出的较小数值。建立如图所示的障碍物边缘E点与虚拟机体模型的切线,并做圆心O与障碍物的垂线,在最短路径下,机器人的航向角为θt,如图6所示。可求得


图6 虚拟包络机体模型Fig.6 Virtual Envelope Body Model
采用此方法可以避免六足机器人与障碍物发生干涉,在避障过程中可以根据测得的距离信息实时调节避障的航向角θ,完成机器人的安全避障。
4 模糊控制系统的设计
六足机器人具备灵活的单腿构造和多样的运动形式,因而相较于诸如轮式和履带式机器人拥有更加优越的在不平坦地面的运动效能。不同于其余移动机器人的避障策略,本文采用的模糊控制策略充分考虑了六足机器人优越的越障性能。模糊逻辑控制系统由控制量、控制规则、模糊化和清晰化、模糊推理构成,属于智能控制策略,能有效解决复杂且难以精确表达的系统[5]。因此,结合越障性能的模糊控制理论更适用于六足机器人的移动控制。
4.1 变量及模糊化的描述
超声波传感器可以探测环境的距离信息,位置和航向角信息可由GPS和电子罗盘测得,障碍物的高度尺寸可由双目摄像机测得。所以,可取六足机器人七个传感器探测的距离数据、航向角夹角信息及障碍物高度作为输入变量,将行进速度及转向角作为输出变量。
如上所述,测量七个方向的距离数据。为简化输入变量数量,对七个方向的测定数值进行分组,分别确定D1、D2是右向环境距离数值,D3、D4、D5为前向环境距离数值,D6和D7为左向环境距离数值,将三组距离信息进行比较并将数值最小的一组数据当做机器人当前位姿的环境距离数值,由此可知,该改进模糊控制系统为5 输入∕2 输出。得出改进的模糊控制系统框图,如图7所示。

图7 模糊控制系统Fig.7 Fuzzy Control System
对于输入变量,设定左向、前向、右向距离分别为LD、FD、RD,取值范围[0,3mm],模糊语言集合{近,中,远},相应记做{N,M,F};机器人输入角度T论域取[−180o,180o],词集取{偏左大,偏左小,不偏,偏右小,偏右大},对应记为{LB,LM,ZO,RM,RB};前方障碍物高度H模糊分为两个等级,分别代{BH,LH}表障碍物高度信息{偏高,偏低}。对于输出变量,令移动速度分别设为FV快速、MV中速、SV慢速,论域取[0cm∕s,20cm∕s];令行走转向角记为M,分为5个等级:LLT(向左大幅度转弯)、LT(向左微转)、FT(直行)、RT(向右微转)和RRT(向右大幅度转弯),论域取为[−180o,180o]。
4.2 输入输出隶属度函数
由于高斯型隶属函数为平滑曲线,使用它可使系统有更高的精度,将该函数应用于输入变量中的左向、前向、右向距离LD、FD、RD,输入角度T及输出变量中的移动速度和转向角。对于输入变量中的障碍物高度H,由于前述分析超过156.78mm即可视为不可越过障碍物,取155mm为临界值,低于临界值时和高于临界值时分别采用高斯型和梯形隶属度函数。得出输入输出隶属函数,如图8所示。
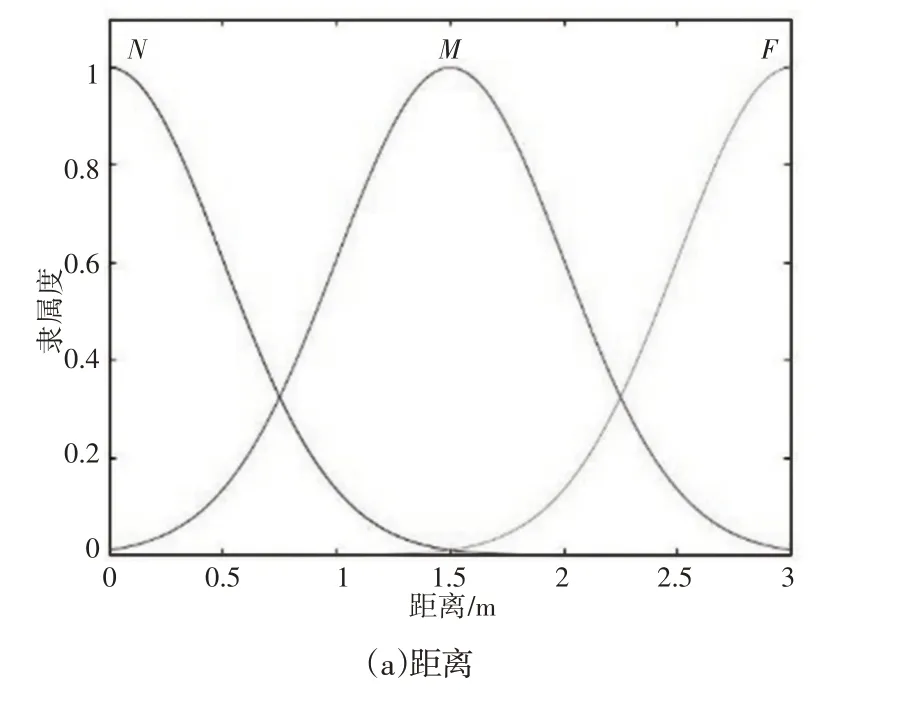

图8 输入、输出的隶属度函数Fig.8 Membership Function of Input and Output
4.3 模糊控制规则
模糊控制规则是一种知识库集合,其正确与否直接影响移动过程的安全性,在设计时,使用专家经验编写并融入控制规则中。
六足机器人的路径规划如下:六足机器人从起点坐标向目标坐标移动,当距离传感器探测到障碍物,对三组距离信息进行比较。当行进方位距离信息较大时,继续保持当前移动方位;当前进方向的障碍物高度低于临界值时,机器人利用其越障能力进行越障;当障碍物高度高于临界值时,选择避障方向,当左侧距离信息数值较小,向右转向,当右侧距离信息数值较小,向左转向。
控制规则使用更为常用的“IF条件,THEN结果”的样式,总的控制规则数为N=n1n2…nm,其中,m为输入变量数量,n1,n2,…,nm是各输入变量的模糊词集数。因此,可得出N=3×3×3×5×2=270条模糊控制规则,其表述形式是
IF(FDisFDiandRDisRDjandLDisLDkandTisTlandHisHh)THEN(VisVmandMisMn)
在表达式中,FDi、RDj、LDk、Tl、Hh、Vm、Mn分别为定义在FD、RD、LD、T、H、V、M上的模糊集。其中部分模糊控制规则,如表2所示。

表2 模糊控制规则库Tab.2 Fuzzy Control Rule Base
由预设的规则库为依据进行模糊推理来求出变量的关联方程。Mamdani型、Larsen型、Zadeh型为常用的方法,三种方法中使用Mamdani取小运算。
4.4 清晰化
六足机器人的执行机构要求的输入是精确值,但得出的输出变量是一个模糊量[11]。为了将其进行清晰化计算,采用加权平均法进行清晰化处理,式中xiuU1(xi)(i=1,2,…,n)为集合U1的各元素xi(i=1,2,…,n)与相应隶属度uU1(xi)相乘,即:

5 仿真试验及分析
V−REP能够搭建出空间三维仿真界面,并且拥有多种环境搭建模块,可以运用自带的模型,搭建出机器人导航运动中的外部障碍物环境。将传感器模块融合到机器人中,来监测其运动情况,并根据输出的状态信息及时调整控制程序,完成机器人导航算法的开发[7]。
运用V−REP 进行机器人仿真,在操作环境中设置了一个10×10的栅格地图并放置诸多尺寸不同的障碍物作为模拟地面环境信息。设机器人的起点和终点在栅格地图中的坐标分别为(−2.5m,2.5m)和(2.5m,2.5m),并将机器人的初始和目标坐标信息预存于控制程序中。在V−REP中的仿真过程,如图9所示。

图9 仿真结果Fig.9 Simulation Result
机器人判断障碍物可跨越,如图9(a)所示;机器人跨越障碍物过程,如图9(b)所示;在六足机器人后续移动过程中,障碍物高度较高,采用避障的方式移动,如图9(c)所示;机器人最终到达目的地,如图9(d)所示。截取部分六足机器人足端在行进方向和纵向的速度及加速度变化过程,如图10所示。可知速度加速度曲线平滑无突变,六足机器人在移动进程下未与障碍物产生干涉。

图10 速度及加速度结果Fig.10 Velocity and Acceleration Results
在V−REP 仿真环境中,如图11 所示。其中传统模糊避障算法对应一条曲线路径,改进模糊避障算法对应另一条曲线路径。传统模糊避障算法对于任何障碍物都采用避障的方式,增大了行进距离。
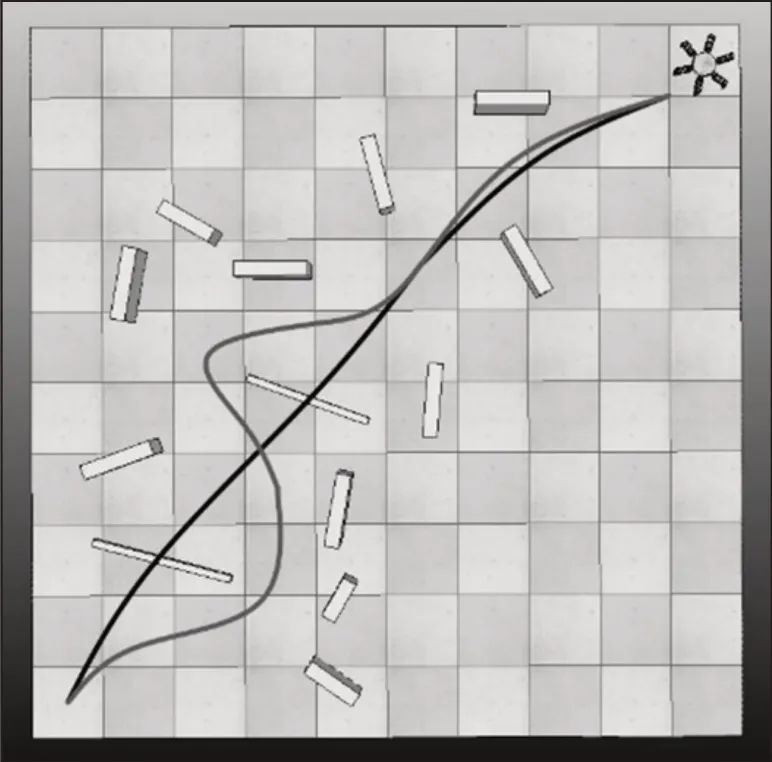
图11 机器人路径Fig.11 Robot Path
相较于传统避障算法,改进后的模糊避障算法充分考虑了由六足机器人自身特点决定的越障能力,在仿真环境中仿真时间相对于传统算法缩短11.457s,且由于前述对于机器人越障高度的分析,移动进程中并未与障碍物产生接触。
6 结论
针对六足机器人在复杂情况下的自主导航问题,设计出基于改进模糊算法的控制系统。硬件设计上采用双目相机获取障碍物高度信息、单个超声波传感器转动测距、GPS和电子罗盘获取位置信息的方式来获取环境地形信息。改进后的模糊控制算法创新性地融合了六足机器人优越的越障能力,依据获取的环境地形信息,选择预设的避障方法,实现自主导航。
通过V−REP机器人仿真软件对导航运动实行仿真,证实了该模糊控制算法能够使得机器人实时、准确地完成自主导航,相对于未结合越障能力的传统避障算法,运行时间显著减少,验证了该算法的可行性和实用性。
