气动肌肉驱动的新型人工膝关节运动学分析
2022-12-26王柯WANGKe
王柯WANG Ke
(重庆交通大学机电与车辆工程学院,重庆 400000)
0 引言
因截肢或截瘫等原因而失去下肢行动能力的病人所需要的人工膝关节都应具有人体膝关节的功能,人体膝关节的一个显著特征就是其瞬时旋转中心(瞬心)可变。然而,目前市面上大部分的假肢及辅助支架简单地将人体膝关节的运动看作固定旋转中心的单铰链运动,并通过电机等驱动设备进行控制。这类设备虽然在一定程度上能辅助病人行走,但因其运动形式与人体膝关节运动形式不匹配,长期穿戴会让穿戴者感到不适,甚至对穿戴者本人造成损伤。
针对这一现象,本文提出一种气动人工肌肉驱动的可变瞬心人工膝关节。该人工膝关节的瞬心轨迹类似于人体膝关节的“J”型瞬心轨迹,其运动形式能很好地与人体膝关节的运动相匹配。气动人工肌肉的引入能提高人工膝关节的柔性,这极大地提高了设备的安全性。气动人工肌肉和回复弹簧拮抗式分布又可以保证关节具有一定的刚度。建立了关节系统的运动学模型,建立了人工膝关节的瞬心轨迹模型,对人工膝关节进行了运动学仿真。
1 人工膝关节设计
整个下肢由大腿、小腿以及连接大腿与小腿的膝关节组成,其结构简图如图1所示。气动人工肌肉和回复弹簧通过绳与人工膝关节相连共同驱动膝关节完成屈膝运动。当大腿不动,气动人工肌肉收缩时,会带动小腿逆时针转动,完成屈膝运动,此时回复弹簧伸长。相反地,当大腿不动,气动人工肌肉伸长时,小腿会在回复弹簧的作用下带动小腿顺时针转动。
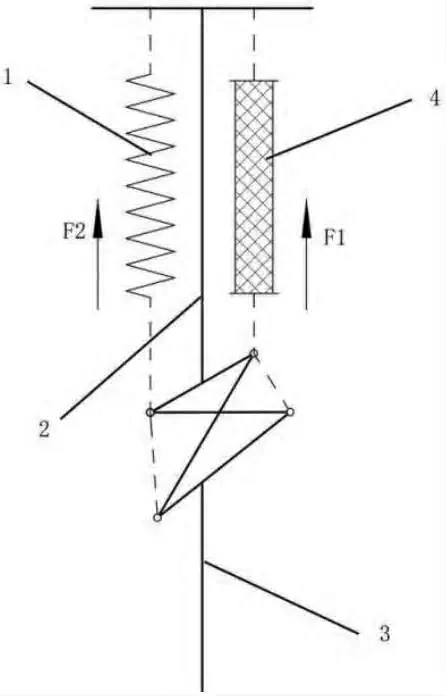
图1 下肢结构简图
2 人工膝关节的数学模型
2.1 气动人工肌肉模型建立
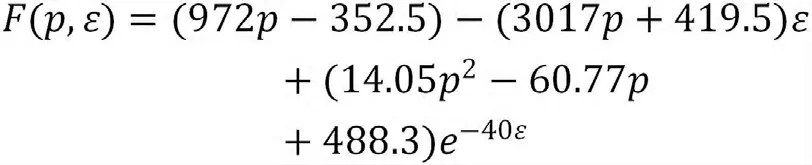
要将气动人工肌肉用于人工膝关节系统中,需要有一个能够准确描述其动态过程的精确模型。选取Tondu-Lopez模型作为气动人工肌肉的近似数学模型:

式中,F为气动人工肌肉产生的收缩力;p为气动人工肌肉的输入气压;ε为气动人工肌肉收缩率分别是气动人工肌肉的实际长度和初始长度;u为ε的非线性衰减系数;fi(p)是以输入压力p为变量的函数,一般取:
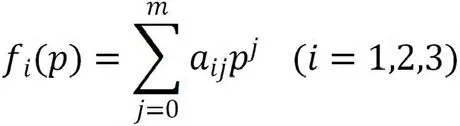
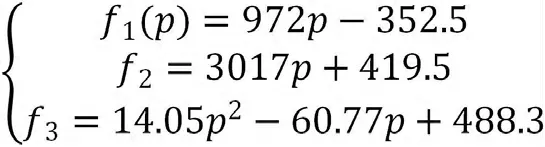
式中,aij为待定系数。可用最小二乘法对其进行辨识。本文以FESTO公司DMSP-40-360N-RM-CM气动人工肌肉为研究对象,得:
2.2 运动学模型建立
在坐标系下对人工膝关节进行建模,如图2所示。膝关节由反四边形ABCD结构构成,F1、F2分别是气动人工肌肉和回复弹簧产生的力,与小腿相连的杆CD在反作用力Fc、Fd作用下平衡。
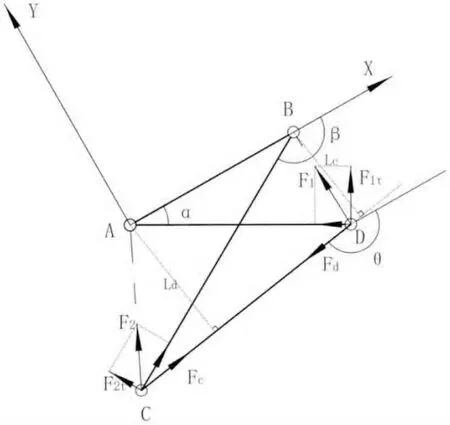
图2 膝关节结构简图
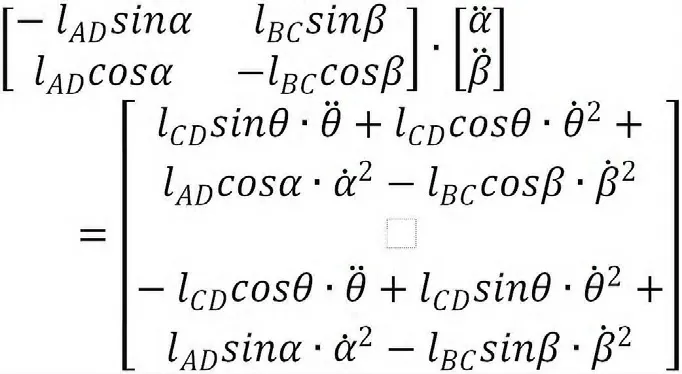
在X-Y坐标系中,根据闭合适量关系可得:

将上式分解得运动学方程:

上式对事件求导可得速度方程:

进一步求导得加速度方程:
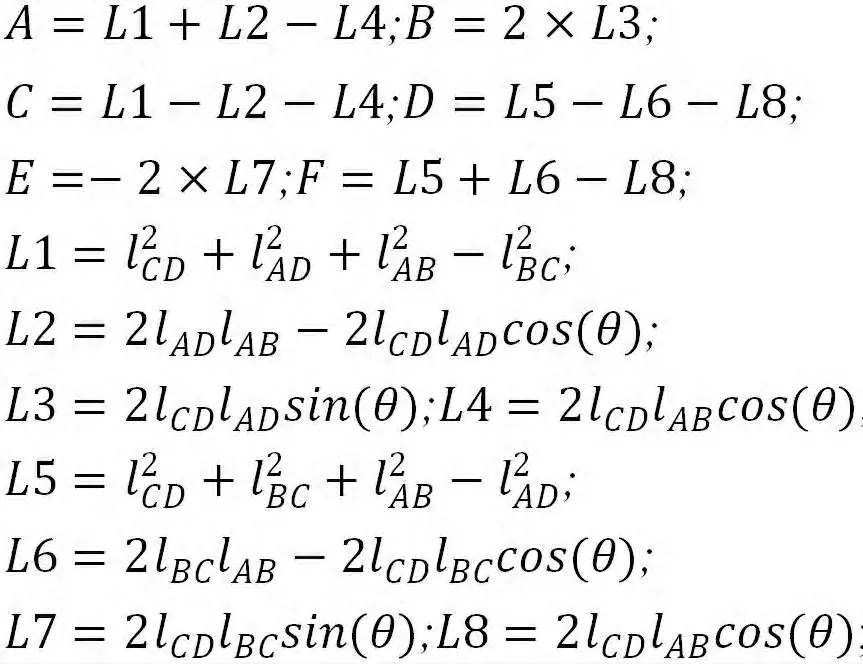
根据约束条件解得:
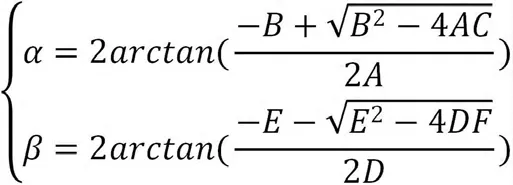
式中:
进一步可得lAC和lBD的长度:


在人工膝关节运动过程中,lAC和lBD的变化量就是气动人工肌肉和回复弹簧的变化量,杆lCD的转动角度θ的变化量Δθ就是膝关节的转动角度。
从演替第1年到演替30年,环境因子均发生了变化。如图2所示,在演替的前3个时期,土壤含水量一直处于缓慢增长的趋势,从演替的第 15年起,SWC上升幅度逐渐变大,演替至第30年达到最大值0.390 g·g-1(图2A);ts在演替第1年最高,而后逐渐下降,在演替第 15年达到最低,为18.622 ℃,从演替第15年到30年以上又开始呈上升趋势(图2B);由图2C可以看出,Il在演替的第1~3年变化不明显,第3年之后,开始呈明显下降趋势,并且各阶段差异显著(P<0.05)。
2.3 瞬心轨迹模型建立
根据瞬心定理可得杆该人工膝关节的瞬心在杆AD和杆BC的交点处,令其为P。杆AB相当于人体的大腿,杆CD相当于人体的小腿。角度θ的变化应与人体膝关节角度变化对应。如图2所示A、B、C、D各点在X-Y坐标系中的坐标分别为:

则,在lAD与lBC斜率不为∞时的方程如下:

联立上式解得:

当,lBC斜率为∞时:

此时解得:

当,lAD斜率为∞时:

此时解得:

即,P点在X-P坐标系中的坐标为P(X,Y)。
3 MATLAB运动学仿真
该人工膝关节通过人工气动肌肉的伸缩来改变lBD和lAC的长度,进而控制小腿杆lCD运动。想要小腿lCD按照所规划的角度运动,需知道lBD对应的变化规律,前文我们对该关节进行了运动学分析,接下来将对其进行运动学仿真,对给定的理想lCD角度变化轨迹通过matlab/simulink软件仿真得到人工膝关节其他部件的运动规律。人工膝关节参数如表1。
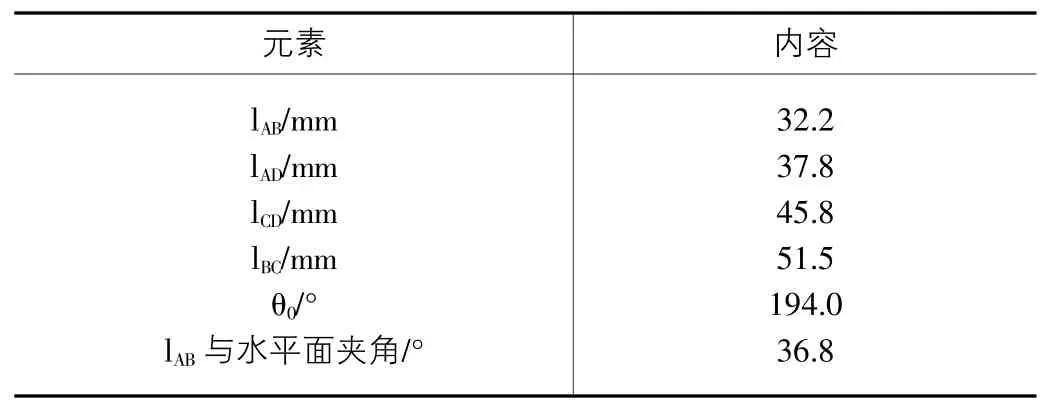
表1 人工膝关节参数
设定关节转动角度Δθ按如下规律变化:
仿真时间设置为60s。仿真结果如图3所示,图中数据分别对应人工膝关节各部件在大腿保持不动小腿在期望运动规律下的角位移、角速度、角加速度、lBD和lAC的长度变化规律。以及当大腿保持不动小腿转动时和小腿不动大腿转动时的瞬心轨迹。由仿真结果可知,该人工膝关节瞬心运动轨迹类似于“J”型,这符合人体膝关节真实瞬心运动曲线。
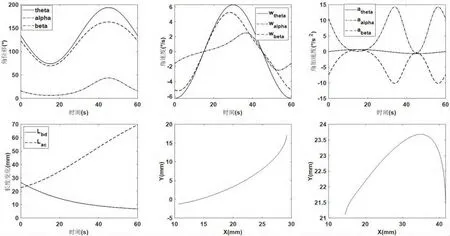
图3 仿真结果图
4 结论
针对市面上大多数固定旋转中心人工膝关节与人体膝关节真实运动形式不同,提出一种气动人工肌肉驱动的新型人工膝关节。本文建立了单根气动人工肌肉的数学模型,建立了人工膝关节系统的运动学模型,并根据运动学约束建立了人工膝关节的瞬心轨迹模型。通过matlab/simukink对其进行了运动学仿真,这为后期对人工膝关节的控制打下了好的基础。同时得出当人工膝关节由运动至时的瞬心运动轨迹曲线。仿真结果表明,该关节在运动过程中的瞬心运动轨迹更加符合人体膝关节真实运动轨迹。
