道路车辆轨迹级联预测系统的开发与应用
2022-12-25王琪
王琪
(江苏联合职业技术学院 扬州分院,江苏 扬州 225003)
0 前言
车辆行驶道路模型在自动驾驶车辆的行为规划和控制中起到重要作用,可以预测车辆的行驶轨迹,进而对行驶轨迹上的道路特性障碍物信息进行获取和预测判断,用于自动驾驶车辆转向、驱动及制动控制。为构建适用真实交通复杂环境的视频车辆检测与追踪系统提供试验数据,设计开发了基于单目视觉的道路车辆轨迹级联预测系统,测试并验证在多种场景下的目标检测与追踪效果[1]。
1 车辆行驶道路模型
基于车辆行驶道路模型可以对主车辆周围行驶的目标进行结构化处理并删减分割,将关键目标和危险目标进行提取,进而作为车辆横纵向控制输入。车辆行驶道路模型的预测计算是自动驾驶领域中的一项关键技术。目前,车辆行驶道路模型获取主要基于单一信息预测,如基于车身运动状态信息(车速、横摆角速度)或基于感知信息(车道线等)。基于车身运动状态信息获取车辆行驶道路模型是基于当前车辆状态的一种稳态估计方法,不能很好地表征未来车辆的运动趋势(如直行车辆前方出现弯道信息);基于感知信息(车道线等)获取车辆行驶道路模型虽然能表征未来一定时空下的道路信息,但是受限于障碍物、天气等,获取的模型鲁棒性受限。而基于多种信息获取的车辆行驶道路模型受限于不同类型感知系统获取信息不统一,很难对多个输入信息进行融合使用。随着自动驾驶技术的发展,未来高级别的自动驾驶系统中传感器的数量会变得越来越多;得益于图像处理技术、目标融合技术、定位技术的突破发展,获取多维度感知信息已经成为可能,而利用这些丰富的信息获取更加准确稳定的车辆行驶道路模型会对行驶在公共道路上的自动驾驶车辆提供稳定可靠的安全保障[2]。
2 道路车辆轨迹级联预测系统
道路车辆轨迹级联预测系统的开发选用飞思卡尔公司生产的处理器,鉴于对图像处理响应速度的需要,选择了MK 60高处理速度的32位进阶精简指令集机器(ARM)微控制器(以下简称“MK 60 微控制器”)。考虑到车辆模型的性价比,选择了三轮玩具车模进行道路车辆轨迹级联预测系统的构建。选用omnivision公司生产的OV 7725型摄像头,摄像头的安装支架采用高强度、轻质量的碳素杆,重点通过摄像头采集的图像来实现自主行驶。
该道路车辆轨迹级联预测系统的硬件框图如图1所示。硬件平台会影响系统运转的性能,对系统的实时性、有效性、实用性等有着直接的影响。电源模块为整个系统供电,摄像头采集到信息后,经直接存储器访问(DMA)模块传给微控制器,处理芯片根据烧录进去的代码对从DMA模块传过来的信息进行处理,然后把处理结果输出给电机,改变电机的转速。利用串口和蜂鸣器来帮助调试程序,如程序中设定当摄像头采集到十字路口的交通信号灯时,蜂鸣器会响;若蜂鸣器未响,则说明识别交通信号灯部分的算法存在问题。
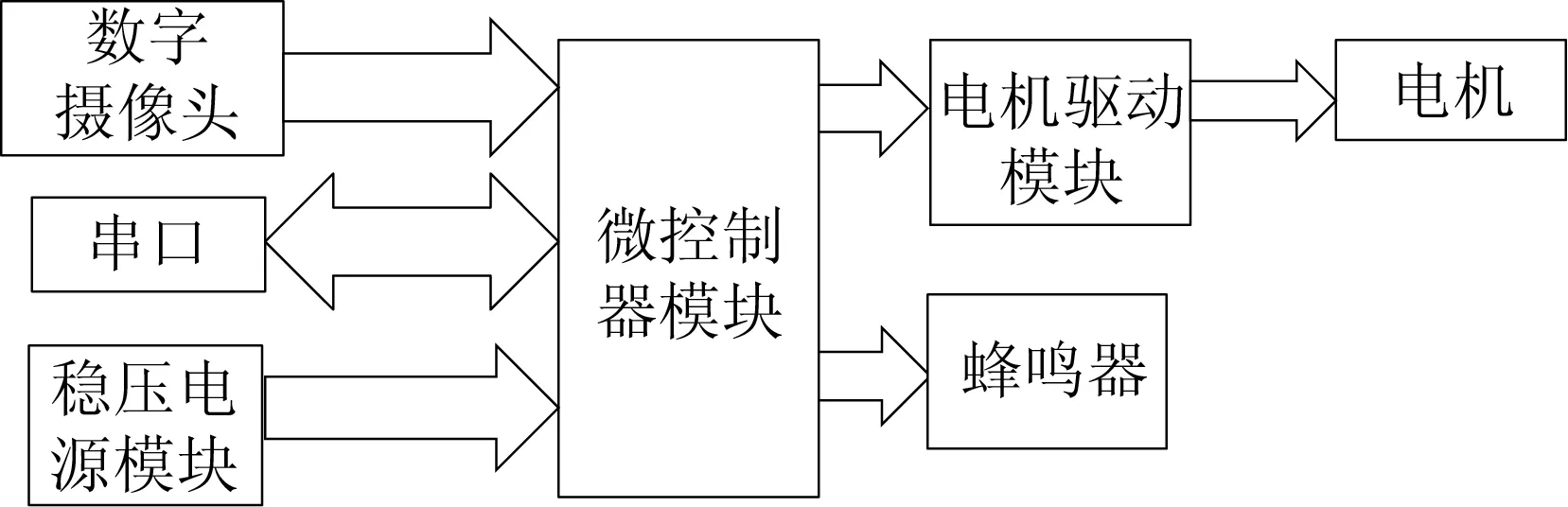
图1 硬件整体框图
稳压电源模块负责系统中不同模块、不同电源标准的电压调节和再分配,为传感器、控制器、执行器提供可靠工作电压。系统中需要供电的模块主要包括:微控制器模块、串口通信模块、图像传感器、电机驱动模块。稳压电源模块使用体积较小、质量较小的可充电式的7.2 V电池组,考虑到各模块之间供电的相互干扰,将设计中的2片直流稳压芯片(LM 2596)的电压从7.2 V稳压至5.0 V和3.3 V,第1路提供给微控制器、无线模块和电机驱动模块,第2路提供给数字摄像头。
微控制器模块采用飞思卡尔公司32位单片机,具有丰富的通用输入/输出口(GPIO)、模拟量输入(AD)模块、串行通信接口(SCI)、脉冲宽度调变(PWM)等硬件资源,其详细配置见表1。

表1 MK 60微控制器硬件资源基本配置
电机驱动模块采用飞思卡尔公司L 9110 金属-氧化层半导体场效晶体管(MOSFET),导通电阻为120 mΩ,最大连续工作电流为5 A。由于分立N沟道MOSFET导通的电阻极低,极大减小了电枢回路的总电阻。
3 设计原理
自动驾驶中,轨迹预测模块一般位于感知模块的后端、规控模块的前端,起承上启下的作用。轨迹预测模块的输入为感知模块提供的目标轨道的状态信息、道路结构信息,综合考虑高精地图信息、目标之间的交互信息、环境的语义信息及目标的意图信息,对感知到的各类目标做出意图预测,以及未来一段时间的轨迹预测。高级驾驶辅助系统(ADAS)需要对周围环境信息有一定的认知能力,最基本的水平是要识别环境,再进一层则需要理解环境,而再进一层则需要对环境进行预测。在对目标进行预测后,便可根据预测信息进行自车的路径规划,做出下一步动作,对可能出现的危险情况进行自车制动或向外界发出警示。
控制电脑自动驾驶技术包括定位与路径规划、环境感知、行为决策与控制等,其中,图像采集模块是整个道路车辆轨迹级联预测系统的关键之一,是整个系统的“眼睛”,图像的正确采集与分析为系统试验车辆完成高质量自主工作提供了保障。在道路车辆轨迹级联预测系统中,假设车辆行驶道路局限于黑色边线包围起的白色区域,后期对图像进行二值化预处理,所以当车辆感知器能识别出黑白两色时,黑色路径就能被正确识别出来。本文采用了OV 7725型互补金属氧化物半导体(CMOS)数字摄像头。
在系统处理图像过程中,中断优先级配置是直接影响图像信息采集完整性的重要因素,这需要准确掌握摄像头的采集时序。OV 7725型摄像头最大帧率可达125帧/s,采用灰度成像,具备场中断和行中断功能,工作方式为DMA传输。
图2是摄像头信号的采集时序图。VSYNC是场中断信号,用于开始采集每帧数据,可选择下降沿或者上升沿触发中断。HREF和HSYNC是行中断信号(时序上不同),HREF上升沿触发输出图像,HSYNC表示间断性输出。如果行中断需要先处理图像再开始采集,则HREF信号较为合适。每2个场中断信号之间有1帧图像的数据,每2个行中断信号之间有1行图像的数据。在使用摄像头时应处理好行中断与场中断的关系,否则处理后的图像会出现异常[3]。
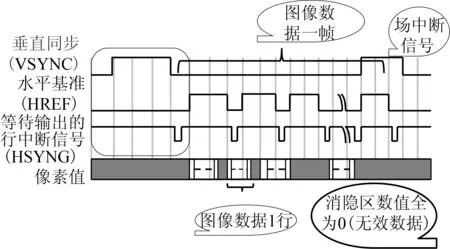
图2 摄像头信号采集时序
摄像头的安装也是图像采集中需要注意的问题,主要涉及摄像头安装的位置、高度和俯视角度3个方面。摄像头的安装没有固定的模式,需要结合车辆和道路实际情况进行观察分析,经过大量图像采集试验后才能确定最佳的摄像头安装位置。为了防止摄像头在车辆模型行进过程中发生晃动,影响图像质量,该摄像头的安装位置较低。
4 软件开发
道路车辆轨迹级联预测系统中所能实现的各项功能都是由软件来控制的,软件所采用的算法优劣直接影响系统的有效性与智能性。首先,车辆模型通过数字图像传感器采集道路信息,然后经DMA模块传输到MK 60微控制器,在对图像进行处理后得出图像的特征,判断图像特征并得出控制方法,最终对车辆模型进行相应的控制,使车辆模型能够沿着设定的路线行驶。该系统选用IAR Systems公司推出的一款基于ARM微控制器的专业嵌入式集成开发程序,并采用MATLAB、VS2010、OpenCV软件作为辅助开发工具。为提高调试效率,特别是在图像处理优化方面,使用上位机可直观地观察摄像头采集的图像信息,同时利用IAR Systems公司在线调试功能来检测设计的图像处理方案是否合理。
4.1 固件库与编译环境
道路车辆轨迹级联预测系统的核心是微控制器程序。系统中的上电初始化、定时中断、DMA传输、比例-积分-微分(PID)算法控制和串口通信都是由MK 60微控制器完成的。为了使系统稳定工作,控制程序的编写是十分重要的环节。丰富的函数集是微控制器的一大优势,用户在编程时不必直接面对寄存器级的软硬件设置,编程工作得以简化。该系统使用了野火公司提供的MK 60微控制器固件库,该固件库包括所有外设的通用功能,用户可以直接调用大多数应用程序,若系统对执行速度有严格的要求,则可直接操作寄存器。
IAR Systems公司在线调试程序具备强大的编程调试功能,使用户编程简单便捷,且性能优越,可以满足专业性的设计需要。
4.2 系统软件流程
程序先对各个端口初始化,然后进行参数配置,准备工作完成后进入while(1)循环,如图3所示。当需要处理的特征都判断完毕后进行下一幅图像的分析处理。
5 测试验证
为了验证道路车辆轨迹级联预测系统的有效性,测试验证在多种场景下的目标检测与追踪效果,为真实交通环境提供试验数据。测试结果显示,提出的道路车辆轨迹级联预测系统能够适应现有道路环境,具有较强的实用性和鲁棒性。
车辆行驶到指示路口(如图4所示)时,系统在中心线的拟合上稍作调整,否则易造成箭头所在行的中心值偏右,这是因为箭头处有黑白色块跳变的明显特征,引起系统在查找道路左边界时发生误判。由图4可知,中心线拟合正确,没有出现各行中心值差别较大的现象。

图4 有行驶方向指示的路口
图5和图6是车辆进弯道前和进弯道后的情况(以左转为例)。由图5和图6可知,拟合得出的中心线正确[4]。
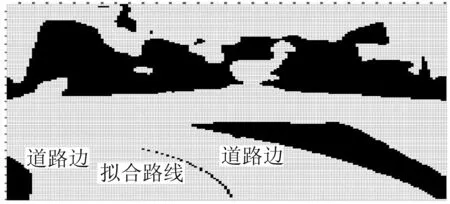
图5 进入弯道前的中心拟合线
车辆进弯道前,可以采集到道路两边边界值,通过计算左右边界值的平均值得到中心值。车辆进入弯道后,左侧边界值无法找到,此时设A为任一行的中心值,B为该行右边界的边界值,C为该行上一行的中心值,D为上一行的右边界值,通过A=C+(D-B)拟合出中心线和右边界的变化趋势。
6 结语
未来的智能化自动驾驶车辆可根据本研究所选车辆模型模拟道路场景,通过摄像头采集的图像可以完成车辆自主驾驶。本研究道路车辆轨迹级联预测系统可以通过模拟场景分析高度、俯视角度、稳定性等方面以判断摄像头的最佳安装位置,保证画面清晰稳定;通过对图像数据的采集、分析处理操作以便于系统判断路况、预测行经路径。根据出现的路况及时进行程序处理,有利于自主驾驶车辆在道路上更好地行驶,有效降低交通事故发生的概率。
