基于智能电动巡检车辆的运行路径跟踪方法
2022-12-23栾奇麒官国飞杨庆胜李春鹏
栾奇麒,官国飞,杨庆胜,李春鹏
(江苏方天电力技术有限公司,江苏南京 211100)
智能车辆是近年来新兴起的技术,该技术将自动控制技术、模式识别技术和计算机技术融合,在实际应用中具有良好的应用效果。采用智能车辆跟踪控制时,不仅能够减轻巡检人员的负担量,同时也能提高巡检的效率[1-2]。
目前,车辆运行跟踪方法应用到多个领域,采矿、现场勘察都应用了车辆运行跟踪方法,在路径跟踪中,采用的跟踪控制理论包括现代、经典和智能三种控制理论。我国对于运行路径跟踪方法已经有相对成熟的研究,传统路径跟踪方法多是利用导航控制器和模糊控制理论建立控制模型,消除稳态误差[3-4]。车辆作为一个非线性系统,内部结构十分复杂,如果在车辆巡检过程中,过度依赖控制模型,那么精确性会降低,车辆无法适应多变行驶环境,内部控制系统也不能满足实际的要求。
综上所述,该文在考虑车辆运行过程中的动力学问题,为了提升巡检的效率,研究了一种新的非线性车辆动力学模型。引入跟踪控制器,既能够保证车辆按照正确路径行驶,还能够很好地实现跟踪,提升巡检的工作效率。
1 智能巡检模型
巡检车辆运行是影响巡检效果的关键因素。其中,智能电动巡检车辆的车速和横摆运动是影响车辆运行的重要因素。在非线性智能电动巡检车辆的动力模型中,智能巡检车辆四个车轮的转动方程如式(1)所示:

式中,Jw表示车轮的转动惯量;r表示车轮的半径;ωij表示转动角速度;Tyrl表示车轮的驱动力矩;Txrl表示车轮的制动力矩。建立的车辆动力学模型如图1 所示。
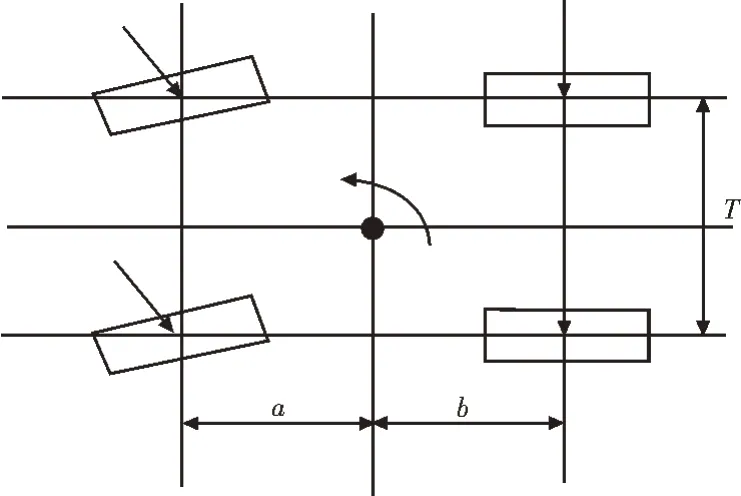
图1 车辆动力学模型
根据车辆动力学模型构建智能巡检模型。在绝对直角坐标系中,智能电动巡检车辆的运动转化方程如下:

式中,Vx和Vy分别对应智能电动巡检车辆行驶速度在绝对指标坐标系中x轴和y轴上的速度分量[5-6]。
由于车辆行驶过程中,时常面对紧急避障情况,轮胎在高速行驶下常处于非线性运动区域。因此,该文基于Pacejka 的魔术公式构建轮胎模型,计算轮胎的纵向力和侧向力,计算公式如下:

式中,x可以表示轮胎的侧偏角或纵向力;根据x对应的物理数值,Y(x)可以表示轮胎的纵向力、侧向力及回正矩;sh表示车轮的垂直偏移量;sx表示车轮的水平偏移量;A、B、C、D分别对应Pacejka 魔术公式中的参数,参数计算方式如下:

式中,参数a和b的取值可根据现场的实际测试结果进行相应调整。
考虑路面不平稳附着因素和轮胎的滑移条件,在采用轮胎模型对呈现出非线性运动的轮胎力学分析时,要充分考虑附着椭圆对魔术公式计算结果的影响,进而提升巡检车辆在巡检中的作用[7-9]。
2 智能巡检信息获取
智能运检电动车与智能运检车管控系统通过运检车辆管控系统进行互联。电动运检车的基础数据、巡检行驶状态数据、巡检业务数据实时上传到智能运检车系统中。从而有效对车辆运行路径状态、充电状态等数据进行实时跟踪。巡检过程中遇到的问题及时与指挥中心进行信息交互。指挥中心能及时对车辆、人员进行调度,并对运检作业全过程进行实时监控,查看现场作业过程与设备状态。其具备车辆信息查询、车辆数据分析、车辆充电信息查询、车辆指挥调度、指挥车智能管理、抢修工单管理、隐患、缺陷工单管理、无纸化作业票、车载安全工器具管理、巡线打卡查询、安全督查、单兵设备管理、运检数据全景展示的功能。智能电动巡检车辆运行路径信息获取过程如图2 所示。

图2 智能电动巡检车辆运行路径信息获取
2.1 巡检信息采集
为将新能源电动车更好地投入到配网端的巡检、抢修工作中,需对车辆运行路径进行图像采集,以实现巡检信息的采集,实现巡检过程中遇到问题及时与指挥中心信息交互,指挥中心及时对车辆、人员调度,查看现场作业过程与设备状态,并对运检作业全过程进行实时监控,提升巡检效率。该文通过搭载光学变焦摄像头和红外热成像摄像头实现配网巡检全过程记录。将CCD 和CMOS 两种型号的摄像头作为智能电动巡检车辆运行路径图像采集的主要设备,以便获取丰富的运行信息[10-12]。CCD 摄像头具有分辨率高、采集图像清晰等优势。CMOS 摄像头集成了A/D 转换器和图像传感器,能够输出多种格式的采集数据,且支持功能调试,相较于CCS 摄像头适应性更强[13]。
2.2 数据二值化处理和去噪
针对CCD 摄像头和CMOS 摄像采集的图像数据中包含的黑线位置信息,为精准识别位置信息的具体内容,提升系统判断的准确性,需对原始图像数据进行二值化处理和去噪处理[14]。
设定某灰度值作为参考阈值,当输入图像的某个像素灰度值超过参考阈值时,该像素点视为白点,数值像素值为1;反之,则视为黑点,数值像素值为0,其二值化处理如下所示:

式中,t为参考阈值;f(x,y)和g(x,y)分别表示位于(x,y)位置上的像素点在处理前和处理后对应的像素值[15]。
2.3 巡检行驶路径中心线提取
该文采用行驶路径边缘检测法提取当前巡检行驶路径中心线,保证智能巡检的质量。首先,设定某一行图像信息的中心点坐标,在指定范围内,从左向右进行像素搜索,当像素值由白变黑时停止搜索,记录该像素点为LeftB;然后,从右向左进行像素搜索,当像素值由白变黑时停止搜索,记录该像素点为RightB。则当前巡检路径宽度为:

结束搜索,进行下一行图像搜索,连接各行中心坐标,即可获取当前行驶路径的中心线。
3 智能电动巡检车辆运行跟踪
智能电动巡检车辆运行跟踪控制是进行车辆转向控制和速度控制的核心,经过二值化处理和提取当前行驶路径中心线中包含的当前行驶路径,充分利用采集信息计算,实现对智能电动巡检车辆的实时控制。
3.1 转向控制
假设经过断点修补后的中心线中包含n个总线点,设中心点的坐标为(x,y),采用最小二乘法重新拟合当前行驶路径中心线,拟合后的当前行驶路径中心线表达式为:

拟合后的行驶路径中心线反映出了智能电动巡检车辆的转向信息,定义智能电动巡检车辆转向的参考偏差为err,则err的表达式为:

式中,l表示行数。通过计算小车在l的实际转向角与预测转向角的差值,对比转向参考偏差,为智能电动巡检车辆的转向控制提供依据,并采用PD 控制算法对车辆的转角进行控制,控制量为:

通过直线拟合后计算巡检时控制量,确定巡检最佳方案。
3.2 车速控制
针对智能电动巡检车辆的车速控制采用闭环控制法,以增量式PID 算法为基础对直流电机的转速控制,有效提升车辆巡检的有效性。通过提取车速检测模块中车辆的实时速度信息,结合当前行驶路径的状态和车辆行驶情况,计算出最适合当前巡检路径行驶的期望速度值,期望速度值为:

式中,vmax表示在可行范围内车辆的最大期望速度值;Δθ为转向角的变化值;P为比例系数。
当智能电动巡检车辆遇到紧急转弯等情况时,车辆的转角量发生急剧变化,智能电动巡检车辆将在增量式PID 算法的调节下减速行驶,保证智能电动巡检车辆行驶的安全性和稳定性,有效控制了巡检的效率[16]。
4 实验研究
为验证该文提出的智能电动巡检车辆运行路径跟踪方法的有效性,选用该文提出的跟踪方法和传统跟踪方法进行实验对比,设定实验参数如表1所示[17]。
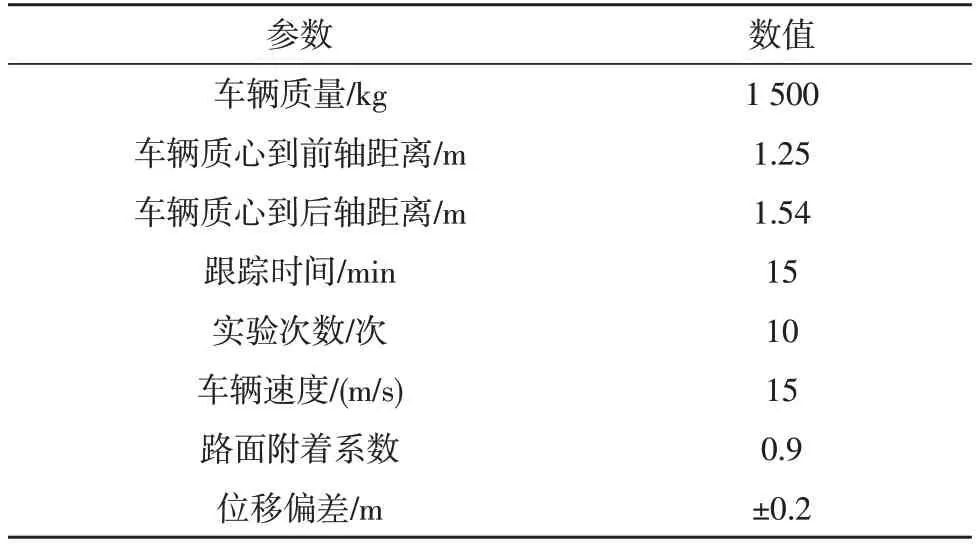
表1 实验参数
为确保验证的准确性,选用该文路径跟踪方法和传统跟踪方法对双移线巡检道路曲线跟踪,利用边界约束条件确定分段曲线和直线,实现拟合。在车辆巡检过程中,该文跟踪方法和传统跟踪方法对直线都有很好的跟踪效果,但在曲线道路上,传统跟踪方法的跟踪能力较差。实验结果如图3 所示。
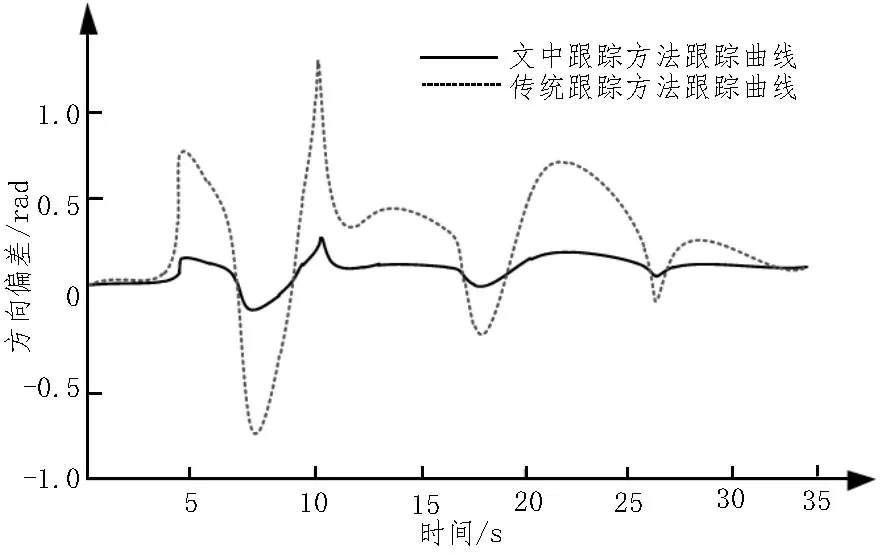
图3 跟踪方向偏差实验结果
根据图3 可知,该文智能电动巡检车辆运行路径跟踪方法跟踪能力要优于传统路径跟踪方法。传统路径跟踪方法跟踪过程很容易受到外界因素干扰,在跟踪过程中,一旦车辆出现避障行为脱离原始的轨道很难预控,得到跟踪曲线偏角与实际偏角的吻合程度相差较大。该文路径跟踪方法设置最大期望值,在巡检车辆内部拥有独立的数据库,很好地判定车辆是否出现偏差,保证跟踪过程的稳定性。
在验证跟踪位移偏差实验结果时,该文同时对低速、中速、高速三种情况的车辆巡检速度进行仿真,得到的跟踪位移偏差实验结果如图4 所示。
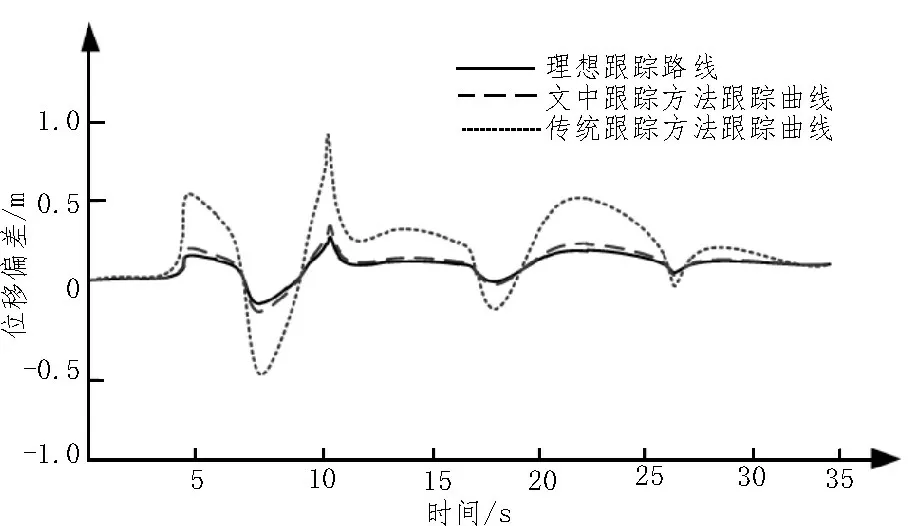
图4 跟踪位移偏差实验结果
根据图4 可知,当车辆处于低速时,该文跟踪方法和传统跟踪方法的跟踪能力都相对较强,对于车辆的跟踪精度很高,能够很好把握车辆巡检速度;然而随着跟踪车辆速度的增加,传统跟踪方法很难判定车辆不断调整的路径曲线,跟踪结果的橫摆角速度也不够稳定,整个行驶过程稳定性相对较低,而该文方法仅仅在车辆速度特别高时,才存在较小的跟踪位移偏差。
5 结束语
该文分析车辆的实时性特点,根据车辆的非线性特征确定运动学模型,通过运动学模型分析位置误差,利用模糊自适应PID 控制器更好地调整车辆的运行方向。实验表明,该文提出的跟踪方法对车辆有很好的跟踪能力,可以确保巡检质量。
