基于边界特征的电力巡检机器人自主越障方法
2022-12-23马占海肖建斌陈亮
马占海,肖建斌,陈亮
(华能新疆吉木萨尔发电有限公司,新疆昌吉 831799)
电网和电力工业的发展离不开输电线路的支撑,输电线路常年裸露在外,受到风吹日晒,不仅要承受大负荷,还要承受外部侵害,日积月累会引发输电线路出现各种故障[1]。因此,必须对高压输电线路进行巡检,由此保证电力系统安全、稳定运行[2-3]。利用巡检机器人不仅能够进行高效率作业,而且还实现了自主越障,通过在线行为和动作规划,并根据实际遇到的障碍自动生成相应的指令序列,完成自主巡检任务[4]。当前,常规越障方法主要有两种,一种是基于有限状态机的电力巡检机器人自主越障方法,该方法可将越障行为分解为若干种离散化关键状态,由此构建有限状态机模型,该方法结合模糊越障原理,产生越障行为序列;另一种是基于多传感器的电力巡检机器人自主越障方法,结合多传感器线路辨识方法,模拟线下仿真环境,分析知识库变化情况,以此为基础,在进行自主越障时,依据被测试的信号自动完成自主越障。然而,这些方法未实现对全线路信息的有效处理。为解决该问题,文中提出一种基于边界特征的电动巡检机器人自主越障方法。
1 机器人自主越障边界特征提取
边界特征提取流程如图1 所示。
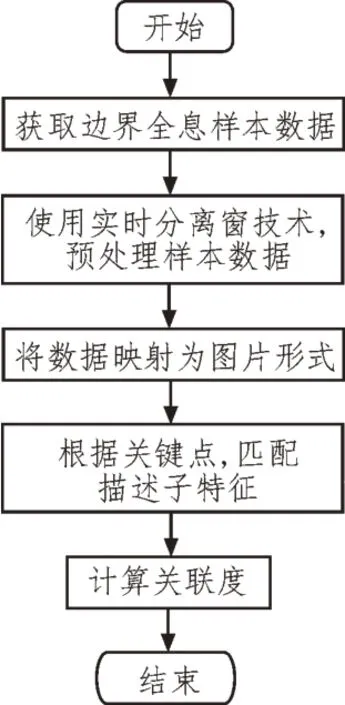
图1 边界特征提取流程
由图1 可知,在边界特征提取过程中,首先获取边界全息样本,提取相关数据。然后,使用实时分离窗技术预处理样本数据。之后,构造样本数据矩阵,并将其映射为图片形式[5]。计算欧式距离,并将其与设定的阈值进行对比分析,获取关联度,由此提取边界特征。
1.1 自主越障图片特征获取
1)构造尺度空间
依据电力巡检机器人尺度理论,二维图像尺度空间可表示为:

式中,I(x,y)表示图像矩阵;G(x,y,σ)表示可变高斯函数,其计算公式为:

式中,(x,y)表示尺度空间坐标;σ表示尺度[6]。由于在电力巡检过程中检测到的关键点是不具有稳定性的,因此,需要在高斯差分尺度空间内巡检关键点[7-8]。
高斯差分尺度空间可表示为:

将式(1)代入式(3),获取高斯差分尺度空间。
2)确定关键点
根据式(3)获取的高斯差分尺度空间,将每个采样关键点与其对应的关键点进行对比分析,由此得到极值点[9-10]。通过检测高斯差分算子能够去除边缘特征,由此求取边界特征根,矩阵如下所示:
3)生成关键点描述子
确定边界特征根中心,以8×8 窗口为例,在各个子块上搭建梯度直方图,由此形成直方图种子群,将每个直方图的中心作为基准点,形成种子点,增强描述结果的有效性[11]。对于不同关键点的描述子情况,获取n个种子点,即n个数据,由此形成了n维描述子[12]。
1.2 特征匹配
计算不同描述子之间的欧式距离,如果该距离小于设定的阈值,则说明特征匹配结果是正确的。
设置匹配规则如式(5)所示:

式中,z表示设定的阈值;D(i)表示欧式距离[13]。
1.3 样本图片关联度计算
计算图片匹配度K可表示为:

式中,Fm表示待匹配图像的数量;F表示图像特征数量[14]。
2 机器人自主越障方法
2.1 基于边界特征的越障行为控制
机器人在自主越障过程中,受到多关节影响,越障动作极为复杂,大大增加了动作序列控制的难度[15]。对于机器人本身运动所必须的关节,需在规划方案过程中设计离线越障动作,并在动作序列的基础上实现其自主越障功能。实际上,机器人障碍物类型的多样性和机器人真实姿态的不可预测性,使得机器人越障行为的精确控制成为一个难题。基于此,结合线上和线下越障方案,根据实际工作环境,合理规划越障动作,以实现一整套顺畅的越障控制行为[16]。为此,提出了基于在线和离线的分层规划模式。
规划方案的执行分为两个层次,一是行为层面,二是动作层面。其中,行为层面不直接驱动关节,而是要求机器人执行一定的动作,如前臂的脱线和越障等行为指令;动作层面与行为层面不同,它主要负责机器人运动关节的驱动,直接对电机运转的方向、速度、停止等进行指令控制,并按照规划好的宏命令进行动作指示[17-18]。
基于边界特征的越障行为控制结构如图2所示。

图2 基于边界特征的越障行为控制结构
由图2 可知,越障行为控制结构主要是由远程管理主机、机器人主体主控机、电机、驱动器组成的。为实现机器人的自主越障行为,需要通过动作序列知识库对越障行为进行规划。先由远程管理主机发出控制命令,机器人主体主控机接收指令后,将其分成两个子命令,分别分配给电机和驱动器,利用CAN 总线控制两个控制驱动器。使用CAN 总线结构,可以有效克服离线后未知因素的影响,避免了其他对起动电机的干扰行为,为实现自主越障控制提供了方便。
2.2 机器人姿态角调整
姿态角调整是越障机器人越障运动规划的重要组成部分,正确调整巡检机器人姿态角能够有效保证控制结构的稳定运行。机械臂的受力可以平均分配给两个控制驱动器,从而有效地保证机器人在越障过程中的平稳运行。若巡检机器人要完成翻越动作,则需要将巡检机器人的一只手臂作离线处理,再将另一只手臂绕过障碍物后返回架空线。在线运行时,采用质心调节机制,通过移动箱保证机器人运动的稳定性。为了实现机器人离线,滚轮和架空地线之间不能产生强相互作用,否则机器人无法脱机。
机器人平衡姿态如图3 所示。

图3 机器人平衡姿态
巡检机器人滚轮半径为r,由此计算架空地线与水平面之间的距离:

式中,α表示水平地面和地线的夹角。
手臂上线定位控制步骤为:
在对手臂上线动作进行定位时,受现场线路运行风力作用和自身姿态调整时重心偏移的影响,产生摆动后需要进行不断的调整,增加了定位动作的时间。由此,对定位方法进行了改进,采用计算方法,找出滚筒、扶手、架空线之间的关系,通过调整机械手的姿态快速完成机器人上线动作,提高了现场环境中作业的速度。
机器人越障时,需要一只手臂悬挂固定,另一只手臂伸出并跨越障碍物,在做完越障动作后才能上线,但是由于运动过程中受风力作用和自身重心偏移影响,产生手臂及夹爪和滚轮之间的角度偏差,为此需调整机器人姿态角进行校正。
2.3 电力巡检机器人自主越障方案
电力巡检机器人自主越障方案如图4 所示。
如图4(a)所示,右侧障碍物为撞击器,用2 号手臂的臂夹夹住防震锤,调整水平地面和地线的夹角,使控制箱慢慢向前移动,此时1 号手臂的臂夹举到一定高度后保持不动。
如图4(b)所示,当2 号手臂向前移动后,1 号手臂向后移动,保证两个手臂处于交叉状态,此时1 号手臂处于2 号手臂和障碍物后方。
如图4(c)所示,机器人在姿态变化后,需要多次修正才能确定所有变化动作,并将每个动作产生的数据存储在操作行为库中,为下一次自主越障提供数据支持。

图4 电力巡检机器人自主越障示意图
3 仿真实验分析
3.1 巡检机器人结构
巡检机器人结构如图5 所示。
由图5 可知,巡检机器人的中臂作为夹持机构,可以克服障碍物和控制箱的滑动,实现重心的调整。在线检测机器人进入相应的越障过程,利用不同的传感器来获取机器人的运动和姿态信息。

图5 巡检机器人结构
3.2 巡检机器人工作环境设计
当巡检机器人完成自主越障后会产生一系列越障数据,将数据规整处理后,可得到一条越障路径,如图6 所示。
由图6可知,控制巡检机器人的电力幅值在前8 s内,均低于0.50 V;超过8 s后,幅值变化较大,最高为0.90 V,最低为0.30 V。
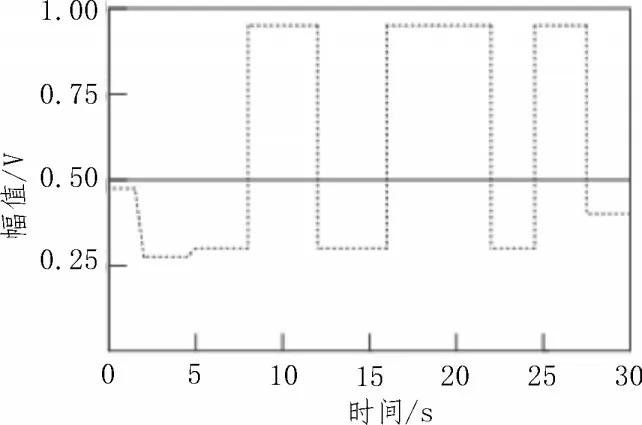
图6 越障路径示意图
3.3 实验结果与分析
基于上述幅值变化,分别使用有限状态机、多传感器和基于边界特征的越障方法对比分析控制巡检机器人的电力幅值,如图7 所示。
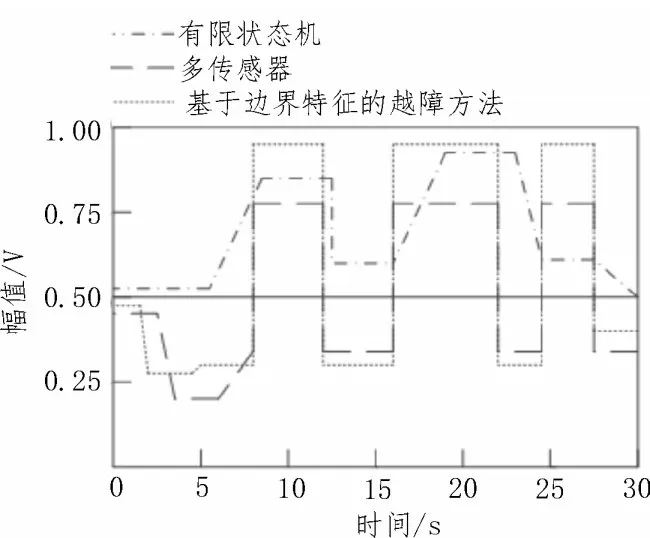
图7 三种方法控制巡检机器人电力幅值对比分析
由图7 可知,使用有限状态机在30 s 时间内,控制巡检机器人的电力幅值均超过0.50 V,且在时间为20~23.5 s内,控制巡检机器人的电力幅值达到最高为0.90 V。在时间为30 s时,控制巡检机器人的电力幅值达到最低为0.50 V;使用多传感器在前8 s内,均低于0.50 V。在8~30 s内,控制巡检机器人的电力幅值上下波动较大,最高为0.75 V,最低为0.35 V;使用基于边界特征的越障方法在前8 s内,均低于0.50 V,在8~30 s内,控制巡检机器人的电力幅值上下波动较大,最高为0.90 V,最低为0.30 V。由此可知,使用基于边界特征的越障方法电力幅值与实际幅值一致。
4 结束语
在实际操作中,巡线机器人越障过程比较复杂,运行过程中会出现许多不可预测的情况。为此,文中从边界特征提取的角度出发,对电力巡检机器人自主越障进行控制,实现了机器人自主越障的智能行为。该方法不仅适用于巡逻机器人的自动越障,而且对某些控制量大、控制逻辑复杂的控制系统也具有借鉴意义。
