单目无人机航测中对距离和面积的采集研究
2022-12-21王一州孙长闰乔雷章
王一州,付 宇,孙长闰,乔雷章
(1中国民航大学 天津 300300)
(2航大汉来天津航空技术有限公司 天津 300300)
0 引言
在现实中,基于任务的总体成本控制以及无人机的负载能力和续航能力等约束,单目无人机在应用中的性价比极高,因此大多数情况倾向于选择装备单目摄像头的小型无人机来完成任务。单目无人机一般安装一台视觉成像设备形成单目视觉,单目视觉在很多方面都比双目视觉有优势。单点测距法是利用单目摄像头作为唯一的传感器设备,在飞行到一定位置时为被测物拍摄一张图像,选取图像中的三个点联立方程进行计算求出被测点到光心的距离。移动测距法是利用两次拍摄中物体在像平面的投影宽度和移动距离之间的关系求出相机与被测物的距离。遥感技术为人们快速、全面了解地表覆盖变化提供了技术支持,在高分辨率遥感技术不断发展的大背景下,大量高品质遥感图像的采集越来越方便。遥感图像是利用遥感技术生成的远距离图像,可以对目标进行有效的处理,本文将介绍利用遥感法进行区域的面积的计算。
1 单目PNP摄影法测距
1.1 单点拍摄法
φ、w、k分别为相机三个方向的欧拉角,只旋转不平移时世界坐标系转化成相机坐标系的公式如下:

式中Xc、Yc、Zc分别代表相机坐标系中的三个坐标,Xw、Yw、Zw分别代表世界坐标系中的三个坐标。
P为被测点,p为像点。O-XYZ为地面坐标系。o-uv为像屏幕坐标系,每个点都是一个像素,u、v分别代表相应像素在图像中的行列值。S-UVF为像空间坐标系,光心S为原点,U、V分别与u、v平行,S到o的距离就是焦距f。S-XYZ为相机测量坐标系。令S在O-XYZ中的坐标为(Xs,Ys,Zs),P在O-XYZ中的坐标为(X,Y,Z),则P在S-XYZ中的坐标为(X-Xs,Y-Ys,Z-Zs)[1]。令P在S-UVF中的坐标为(X’,Y’,Z’),p在S-UVF中的坐标为(u,v,-f)。
P在S-XYZ的坐标(X-Xs,Y-Ys,Z-Zs)与P在S-UVZ的坐标(X’,Y’,Z’)通过坐标系变换公式带入关系式可以得出成像基本方程如下。

通过天文的方式[2]得到P在地面直角系下的坐标,u、v可以在图像中简单量出,相机的焦距f已知,此时剩下六个相机外方元素未知数。再采取图像中的另外两个被测点,利用相机一组照片中的三个点可以列出三组基本方程,此时一共有六个方程和六个未知数,通过计算机就可以求出对应的六个未知数,P在S-XYZ中的坐标(X-Xs,YYs,Z-Zs)就能得出,因此能得出被测点P到相机距离D的公式如下。

1.2 移动拍摄法
当相机在第一个点时,拍摄一张照片。假设此物体宽度为W,在摄像头成像平面的投影宽度为W1,摄像头焦距为f[3],则相机距离被测物的距离d为。

接着让相机向前移动d1距离,为拍摄物拍摄第二张图像,此时被测物在摄像头成像平面的投影宽度变为W2,但是物体实际宽度W和摄像头焦距f都不变,此时相机距被测物的距离d2为。

因为d-d1=d2,并且焦距f和被测物实际宽度W都不变,所以结合两式可以得出相机距离被测物的距离d为。

所以通过相机在相机与被测物直线方向上的移动距离和两次被测物在成像平面上的宽度就可以知道相机与被测物之间的距离。下图为具体编程步骤:
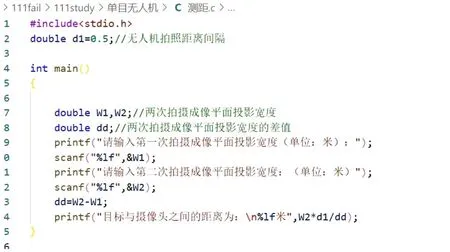
图1 移动测距法编程步骤
模拟实验方案规划:提前准备好两个不同焦距的镜头,在进行测距前先要知道相机的各项参数。搭建好实验平台,选择好被测物进行测距实验,具体步骤如下:
(1)无人机先装配较大焦距的镜头,选取一个宽度较宽的长方体纸盒作为被测物,将纸盒放置离镜头3 m的位置进行第一次拍照,之后每隔0.5 m拍一次照,得到了被测物在不同位置下的宽度,根据公式计算出被测物到镜头的距离并与实际距离进行对比。
(2)无人机更换较小焦距的镜头,选取同一个纸盒作为被测物,将纸盒放置离镜头3 m的位置进行拍照,之后每隔0.5 m拍一次照,得到了被测物在不同位置下的宽度,根据公式计算出被测物到镜头的距离并与实际距离进行对比。
(3)将较大焦距镜头下得到的实验结果与较小焦距镜头下得到的实验结果进行对比,发现在误差范围内虽然焦距不同但是测得的距离很接近,因此焦距不是距离的测量的影响因素,验证了公式(7)的可靠性。
经过分析,发现产生误差的主要原因有:无人机移动的方向不一定严格按照镜头与被测物之间的直线方向移动;不同焦距下光心在镜头内的某一位置不能精确确定;在小焦距远距离情况时被测物在屏幕上的图像非常小造成测量宽度时产生误差。移动测距法的优势是计算较简单且用计算机编程过程容易实现,劣势是无人机移动的方向不一定是无人机与被测物连接的直线方向导致无人机与被测物之间移动的直线距离需要进行计算且本实验并未在较远距离进行测量而无人机一般可飞行到100 m左右,不过在不需要高精度计算的情况下可以大幅降低计算难度,在实际应用过程中可以根据实际需求和条件选择性使用。
2 遥感法测面积
2.1 航前准备
(1)首先根据任务需要进行测区已有资料的收集,并制订飞行方案。了解测区实际情况后,进一步优化作业方案,进行测区分区和航线设计[4]。合理布设像控点[5],借助RTK设备对每个像控点布置精度进行检测[6],有效提升测量精度。
(2)飞前检测,保证网络畅通,确保电量充足且各项功能指标正常,保证好飞行高度。拍摄模式可以采用定时拍摄。
2.2 生成正射影像
当飞行完成后,将已获取的图像和数据导入到电脑中,利用Pix4D软件进行正射影像生成。Pix4D软件是一款无人机影像数据专业处理软件,它可以利用从地面、轻型无人机或常规航摄的影像处理正射影像镶嵌图的3D模型,提供厘米级别的精度,为全自动工作流程[7],它能够快速通过导入拍摄的影像和控制点完成图像的实时拼接和正射影像的生成。通过对运用Pix4D生成的正射影像图的精度进行检查,进一步验证了Pix4D在正射影像图制作中的可行性[8]。该方法与传统方法相比速度快、精度高,可以为无人机的航测和图像处理提供技术支持。具体操作步骤如下:
(1)打开pix4D软件,新建项目,填写好项目的名称并选择项目位置。
(2)点击添加图像,不需要修改图像的坐标系和相机型号,因为它能自动识别。
(3)点击已知坐标系和高级坐标系选项,从列表中选择合适的控制点坐标系。
(4)选择3D Maps,勾选初始化处理、点云和纹理、DSM,正射影像图及指数三个选项并开始,生成质量报告,质量报告中能看出很多误差分析。
(5)导入控制点后点击空三射线编辑器,刺像控点后重新优化。
(6)通过镶嵌编辑器将正射影像整体导出就可以得到正射影像图。
2.3 图像灰度化
当生成正射影像后,图片由于受到多种颜色干扰导致很多特征不被识别,因此需要把彩色图像转换为灰度图像使特征更加明显。灰度图的各种数据一般用8位二进制来存储,因此会产生256个数值,其中将黑色表示为0,白色表示为255,其余中间数字表示不同程度的黑色与白色相结合的颜色即灰色。图像灰度化就是根据公式计算出每个像素点的亮度,从而直接用亮度来表示图片[9]。公式如下:

其中Y为亮度值,R为原像素点的红值,G为原像素点的绿值,B为像素点的蓝值。所以一般对于24位的BMP图像,利用此公式求出Y值后再将此Y值赋给其余的R值、G值和B值。
2.4 二值化处理
图像二值化就是将数字图像转化为二值黑白像素的矩阵形式,将某些区域从背景中分离出来,为后续图像的边缘提取及其他图像处理奠定基础[10]。可以采用Bernsen算法[11]的局部阈值法求阈值,此方法的优点是光照阴影处理效果明显、图像细节保留较多,缺点是有大量无关细节存在和噪声较多。
2.5 降噪处理
在进行完二值化处理后,会产生很多无关细节和噪点,为了使提取的图像特征和轮廓更加清楚,需要进行降噪处理。目前有很多降噪处理的算法,可以采用一种将多重中值滤波与曲波变化相结合[12]的降噪算法。
2.6 提取轮廓
通过OpenCV中使用Findcontours函数可以简单快速地检测出物体的轮廓,非常方便。
2.7 坐标变换
图像上一共提取出n个点,每个点都可以转换成实地坐标,公式如下

式中,trans(0)、trans(3)代表图像左上角点的实地坐标;trans(1)是像元的宽度;trans(5)是像元的高度;若图像指北,则参数trans(2)、trans(4)默认为0[13];m、n为图像轮廓上各点的像素坐标;x、y为图像轮廓上各点的实地坐标。
2.8 面积计算
三角形面积可以用向量积进行计算,而多边形可以拆成多个三角形来计算总面积。假设多边形有n个顶点,则固定一个顶点则可以将其分割成n-2个三角形。例如一个六边形,n=6,固定一个顶点则可以分割成4个三角形。
读取轮廓上各个点的横坐标x和纵坐标y,将其转化为n顶点,将轮廓近似为不规则多边形,则轮廓的面积S为。

3 结语
本文对单目无人机的单点测距法、移动测距法、遥感法测面积进行了研究,为无人机在航测中的数据采集提供了支持,有一定适用性。但仍有一些问题待解决,比如具有较高精度特点的单点测距法如何完成编程工作以及在移动测距法中设计出一种无人机,在其与被测物直线方向上移动距离的计算方法,从而减小误差,在测量面积的坐标变换中要知道各点的实地坐标会有困难。众多步骤中一些步骤仍需改善例如设计出更优的二值化处理方法和降噪处理方法,在未来将采集更多数据进行误差分析和步骤优化。