电动汽车永磁同步电机交流伺服驱动系统研究
2022-12-21王暑明
王暑明
(苏州高等职业技术学校,江苏苏州,215009)
1 研究背景
国外对电动汽车电机的研究已经经历了一个很长时间的发展过程。特斯拉以及大众宝马等外企各项技术和行业标准制定完善,生产的电机控制器有严格的行业标准,可非常方便地兼容不同的电动汽车电机型号。生产电动汽车电机控制器的大型外企主要有整车生产企业,汽车零配件生产商和大型半导体公司。零配件生产商主要包括博世、大陆、麦格纳;整车企业包括福特、别克、奔驰等汽车公司。TI、Freescale、Infineon 等半导体公司同样提供了针对自家控制器的电动汽车电机控制方案。
当前国内电动汽车发展迅速,但起步较晚,国内电动汽车如比亚迪、蔚来、小鹏等,普遍采用交流永磁同步电机驱动电动汽车。控制器采用模糊PID 等算法计算IGBT 的占空比来控制永磁同步电机的运行。该方案通过检测电机转子位置,在定子线圈上施加对应脉动电压,生成的磁场非正弦旋转变化,推动定子转动时会造成电机抖动。同时,算法生成的磁场只能根据电机转子当前的位置产生相应的推力,不具备控制转子减速和定位的能力。对电机的伺服控制,国内研究较少,掌握伺服技术的企业不多,目前尚未有搭载交流伺服驱动系统的电动车车型。
结合当前电动车电机控制方法和电机伺服控制技术,研究一种控制电动汽车电机的伺服驱动系统,解决当前电动汽车电机控制中出现的电机抖动、不能控制电机减速和定位的问题。随着电子元件的发展,成本的降低,人们对电动车品质要求的提升,电动汽车电机的伺服驱动技术将成为电动汽车行业的发展方向。
2 电动汽车永磁同步电机数学模型
■2.1 电动汽车永磁同步电机结构和控制架构
交流永磁同步电机由于其性能优良,被高档电动汽车广泛采用。研究采用的永磁同步电机转子为永磁体,并做成特定的形状,使定子磁体生成正弦的磁场。永磁同步电机主要由定子、转子、基座和编码器组成,结构如图1 所示。
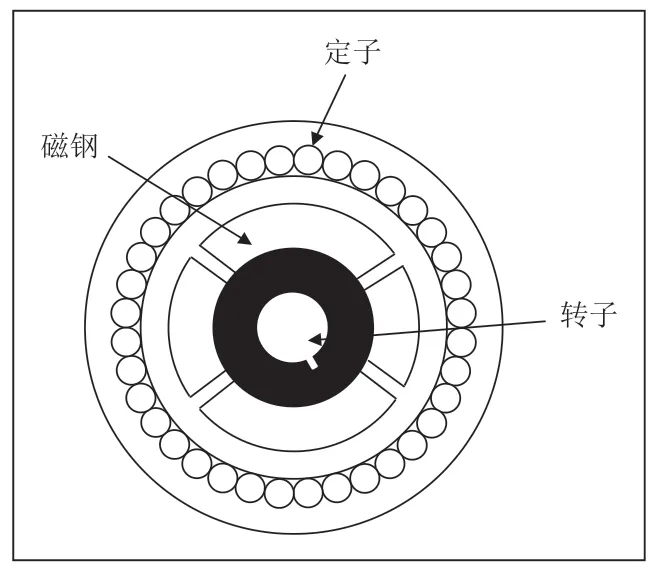
图1 转子为永磁体的电机模型
电动汽车的电瓶一般提供330V 左右的直流电,可以直接供给直流母线。但电机启动和制动时电流较大,因电瓶存在内阻,会拉低电平电压,需将直流电经逆变器等装置处理后再输出交流电供给控制器。系统选择交-直-交的电机控制方式,主要模块有整流桥电路、IGBT 逆变器电路、控制IGBT 的电路、三相交流永磁电机、位置编码器以及电流传感器,控制IGBT 的电路控制IGBT 的通断和频率,结构原理图如图2 所示。
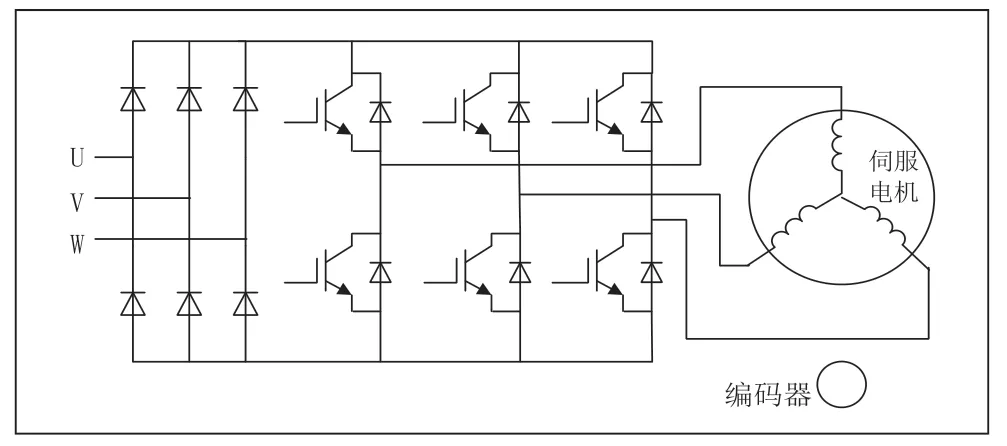
图2 电动汽车永磁同步电机交流伺服控制系统基本架构
■2.2 建立三个坐标系
控制器通过控制六个IGBT 开关管的通断来控制定子线圈上的电压,定子线圈得到交变的电压生成旋转磁场,直接计算六个IGBT 控制信号非常困难,可通过坐标转换方法,将电机电压电流等参数通过坐标变换,在另外一个坐标系中表示并计算,再回原坐标系输出可简化运算。
图3 是P=1 的永磁同步交流电机,X、Y、Z 为线圈绕组首端,X1、Y1、Z1是尾端,以中心为原点,建一个静止的三轴坐标系A、B、C,A、B、C 三轴的轴间隔为120°,分布在平面上。在此基础上建一个直角的坐标系αβ,两轴分别为α和β,让α轴与A 轴重叠,β轴置于相对A 轴前90°,构成一个两轴的静止坐标系。再定义一个旋转的两轴坐标系d、q,d 轴位置放在置电机转子的中轴线,让q 轴垂直于d 轴安放。θ为d 轴与α轴夹角,也叫空间上的电角度,参数的坐标变换方法可用Clarke 和Park 坐标转换方法。
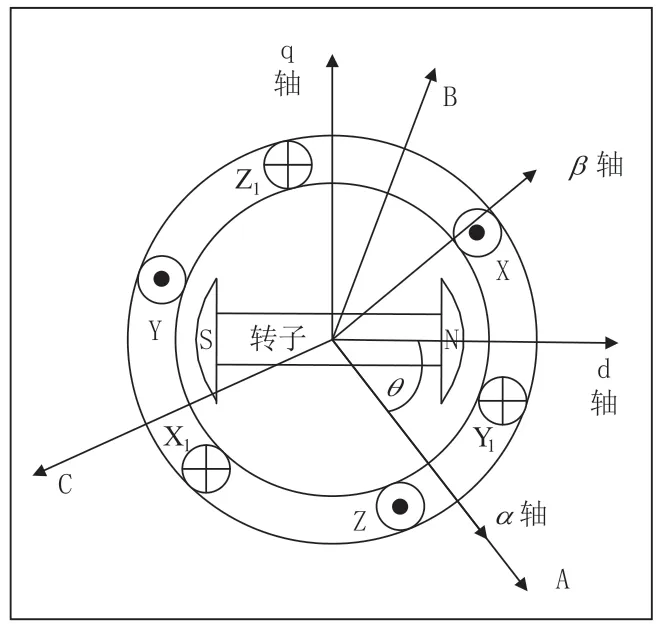
图3 电动汽车交流永磁同步电机三个坐标系相对位置
■2.3 建立电动汽车永磁同步电机数学模型
建立永磁同步交流伺服电机数学模型需构建电压、磁链、转矩和运动方程式,电机运行时,定子转子的磁场相互影响,会发生较大的电磁耦合,建模忽略一些次要影响因素,做如下假设:
(1)忽略铁芯饱和的影响;
(2)不计铁芯锅流损耗、磁滞损耗;
(3)永磁同步电机绕组产生的感应电势为正弦量;
(4)转子永磁体电导率为0。
定子电压在空间表达式如下:

定子磁链在空间的矢量表达式如下:

式中参数:Rs:定子的内阻;Ls:定子线圈的感抗;ψs:定子磁链矢量;ψr:转子磁链矢量;Is:定子电流矢量。
定子三个线圈电压如下式:
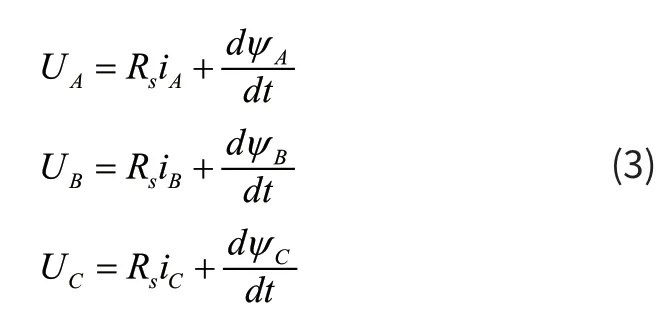
式中参数:UA、UB、UC:定子绕组三相的电压;Rs:定子线圈内阻;ψA、ψB、ψC:定子磁链。
将三相电压值在d-q 坐标下表达如(4)所示:
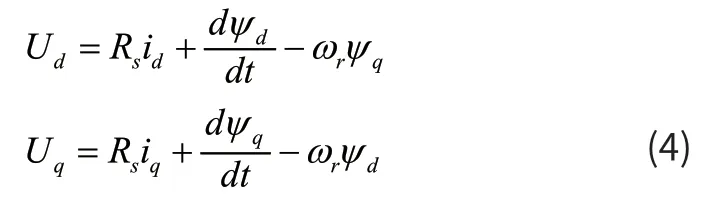
式中参数:qψ:定子在q 轴 上的磁链;dψ:定子在d 轴上的磁链;rω:跟随坐标系旋转的角速度。
磁链方程为式(5),其中:dL、qL是定子在d、q 轴下的电感值,fψ为转子的磁链。

永磁同步电机转子励磁方式为永磁体,转子的永磁体激发的磁场只跟d 轴定子绕组的fψ有关。转矩和运动方程在d、q 旋转坐标系中可表示为:

上式:Te、TL:电磁转矩、负载转矩;np:为电机的极对数。
由上式可知,影响电磁转矩的变量只有id和iq两个量。可以通过控制id和iq来实现永磁同步电机的伺服控制。
3 电动汽车永磁同步电机的伺服驱动
由上面分析可知,转矩Te和iq正关联,可通过控制iq来控制转矩。控制id来控制励磁。控制id和iq用比例积分控制器来调节。
当id= 0时,永磁同步电机的转矩表达式可简化为:

采用这种方式,直流部分电流置为0,转矩只受交流部分影响,直流和交流部分完全独立控制。采用这种控制,可以将转矩和励磁分开控制,控制算法简单,出错概率小;响应速度快,稳定性高;扭矩无太大波动,电机无抖动。
■3.1 SVPWM 方式计算开关信号
id控制转子磁通,iq控制转矩,将实测的电机id、iq与设定的值送入PI 调节器,PI 调节器计算出Ud来控制磁通,Uq来控制转矩,Ud和Uq的值在αβ坐标系表示为Uα和Uβ,将Uα和Uβ的值采用正弦脉宽调制(SPWΜ)方式,生成IGBT 的控制信号。IGBT 的通断可控制电机三相定子的电压,三相电压在空间的矢量叠加,构成了磁链波形,磁链的变化跟随基准磁链。
六个IGBT 两两分布在三个桥臂上,通过对六个IGBT的开关,控制电压矢量变化,实现磁场的旋转,定义一个布尔量(x=a、b、c):

由于同一个桥上的两个IGBT 不能同时导通,所以六个IGBT 开关状态共八种,分别为:U0(000)、U1(001)、U2(010)、U3(011)、U4(100)、U5(101)、U6(110),U7(111)。
直流母线电压表示为Udc,线圈上的U、V、W 电压定义为UA、UB、UC,在ABC 坐标中相差120°。三个跟随时间变化的电压矢量UA(t)、UB(t)、UC(t),其电压矢量大小遵循正弦规变化:
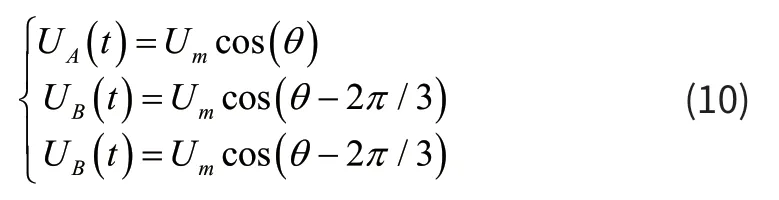
上式:UA(t)、UB(t)、UC(t):分别为三相上的电压值;Um:为定子上单相相电压幅值;θ:为2πft,f是频率。
三相定子线圈上的电压空间矢量Uref可表示为:

上式:Uα、Uβ:分别为两相静止坐标系下的α、β轴电压。
IGBT 控制三桥臂输出120°角度差的正弦波电压可以生一个旋转的电压矢量(Uref),其幅值为母线电压,角频率为ω=2π f,电压积分为磁链,所以只需控制Uref幅度不动,相位角变化匀速,积分就可以保持不变,生旋转的圆形磁链。IGBT 逆变电路在各通断状态下,生成的电压矢量值见表1所示,空间矢量如图4 所示。
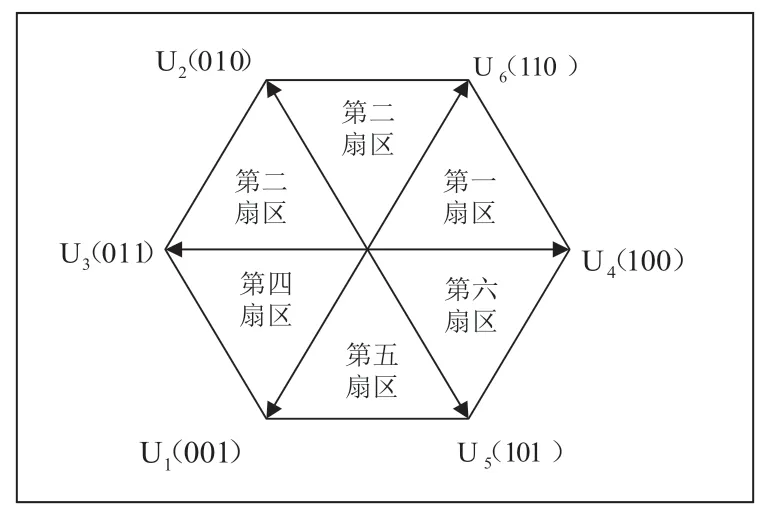
图4 线圈电压在空间矢量上的分布
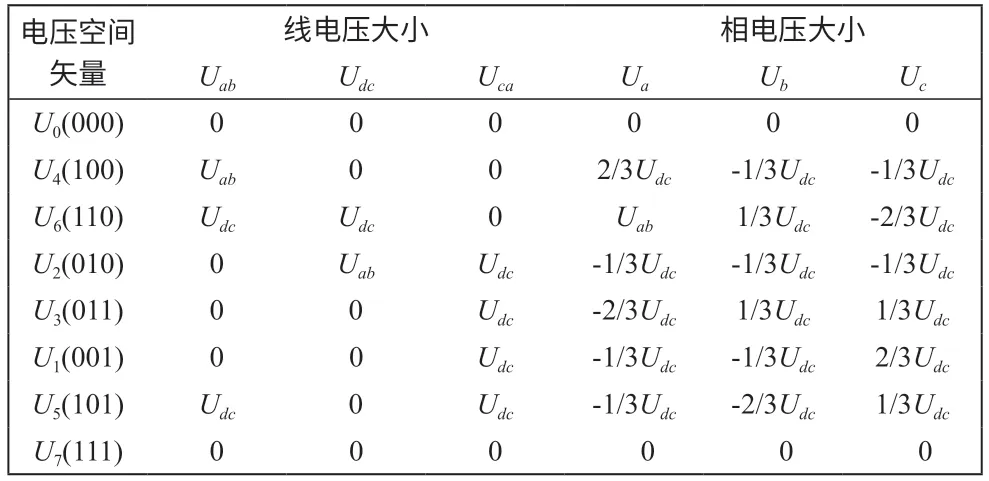
表1 IGBT逆变电路各通断状态下的电压矢量
■3.2 SVPWM 合成方式修整
上述算法控制六个IGBT 的开关生成的磁场为多边形,运行不平滑,生成连续平滑旋转磁链的方法如下:
先用Uα、两个向量判断合成的电压矢量处于哪一个扇区。定义三个变量M1、M2、M3。
当M1> 0, A =1 ,否则A = 0;当M2> 0,则B > 1,否则B = 0;类似的,M3> 0时, C =1 ,否则C = 0。
通过M1、M2、M3判断所在区间, 规定N = A + 2 × B + 4 × C ,N 与扇区的对应关系见表2 所示。

表2 扇区判断参照表
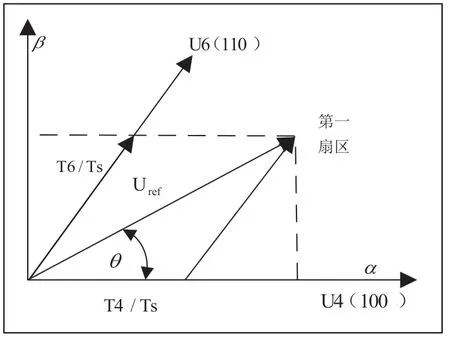
图5 1 区内的定子电压空间矢量的合成分解
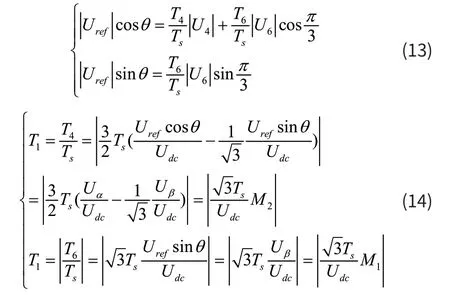
其中:ST 为运行周期。
■3.3 电动汽车永磁同步电机伺服驱动系统控制过程
根据上面的推导,电机电磁转矩和iq成正比,励磁分量和电流di相关,而d、q 轴是互不干扰的,这样就将电磁转矩和励磁拆分控制。将算法运用于实践整理如下:
(1)电流传感器检测定子线圈上的电流值:ia、ib、ic,经过滤波和模数转换发给DSP 芯片。
(2)ia、ib、ic经Clarke 坐标转换,变成αβ坐标系下的两个量:iα和iβ,iα和iβ为正交的正弦量。
(3)用坐标转换方法将iα和iβ的值在d-q 坐标系中表达,得到分量di和qi。
(4)编码器检测转子旋转状态,芯片通过解码得到转子实际速度和角度,实际速度和角度与上位机发出的速度角度命令一起输入控制器。
(5)将实测的电机id、iq与设定值送入PI 调节器。id控制转子磁通,iq控制转矩,PI 调节器分别计算出Ud和Uq的值。
(6)Ud、Uq经坐标变换,转换成αβ坐标系下的Uα、Uβ。将Uα和Uβ输送给SVPWΜ 模块,SVPWΜ 模块计算出控制IGBT 的脉冲,IGBT 控制定子线圈上的电压,最终定子线圈生成旋转磁场。
4 仿真研究
系统分三闭环控制,从内向外嵌套,分别为电流环、速度环和位置环,结构框图如图6 所示。
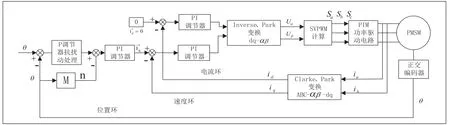
图6 电动汽车永磁同步电机交流伺服控制系统三闭环控制框图
根据上述结构框图和算法研究,在Simulink 平台下搭建永磁同步电机交流伺服系统的仿真。模型如图7 所示。控制器主要有电流、速度和位置PI 控制器,SVPWΜ,Park变换和Park 逆变换模块,Clarke 变换模块、示波器等模块。速度信号和负载信号输入PI 调节器,具体参数由系统运行状态修正;用坐标变换运算实现控制参数的坐标转换;再用SVPWΜ 模块将Uα和Uβ的数值调制成脉冲,脉冲信号控制IGBT 驱动桥,驱动桥电路给电机输入调制的正弦电压,控制永磁同步电机本体旋转,显示器显示电机的电压、位置、转速和转矩等。
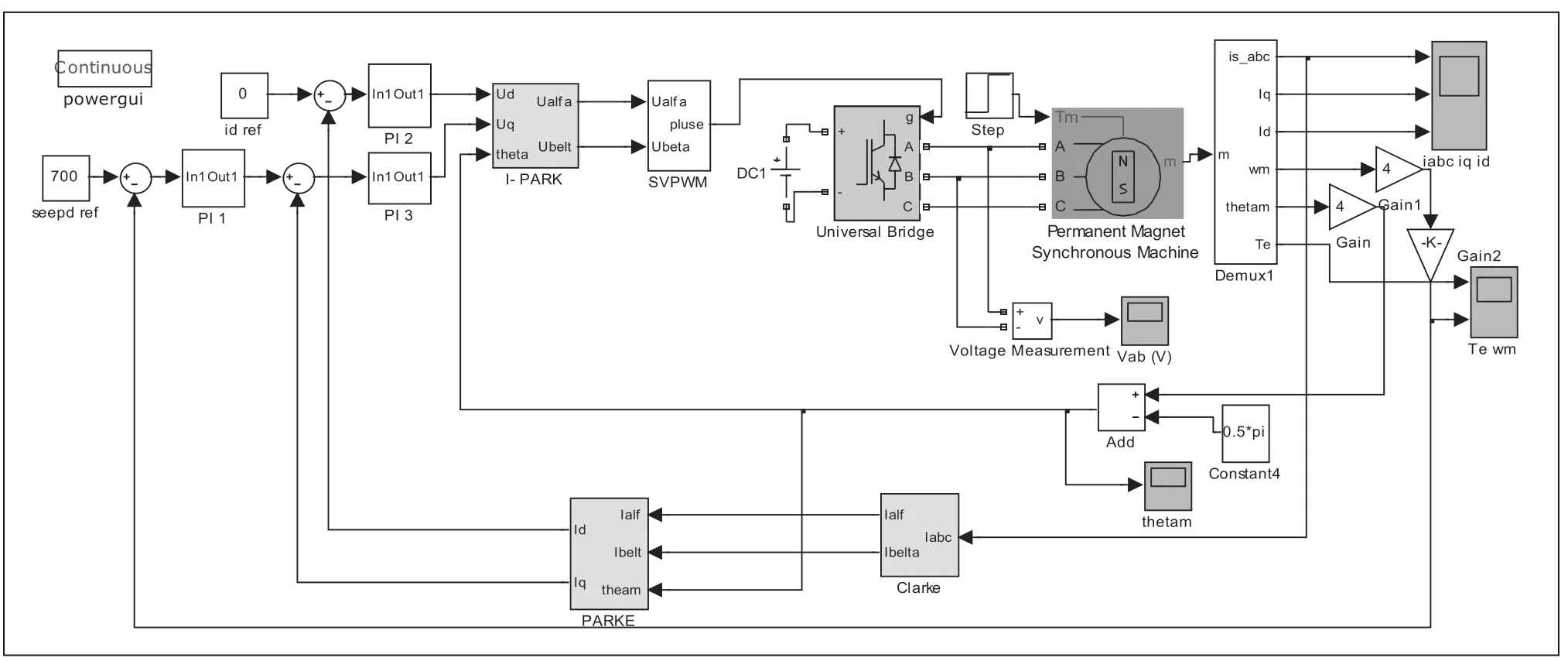
图7 基于id = 0的矢量控制系统仿真模型
采用odel5s 算法,选步长可变,系统运行时间设定为0.3s,设定0.001 误差;电机极数选择4;转子转动惯量设定为J =0.0006329kg⋅m2;定子绕组内阻选取R =0.9585Ω;感抗Ld =Lq =0.00525H;电机磁通量值ψf=0.1827Wb;速度设定为700rad/s;角度为10rad ;负载转矩开始1N.M,0.1秒后增加为3N.M。
■4.1 突加负载下的三相相电压仿真曲线
如图8 所示,电机由于是感性元件,启动时引起了线圈上的电压震荡,0.02s 后电压稳定下来。在0.1s 时,负载加倍,定子线圈上的三相电压供应相应增大,波形平滑,说明系统在突加负载情况下,稳定性非常高,既不会对电源造成较大的冲击,也不会出现抖动。

图8 突加负载下定子的相电压曲线
■4.2 负载变化下的转矩变化
如图9 所示,在系统得电的0.02s 内,转矩脉动较大,电机经过0.02s 的启动后,转矩稳定下来。0.1s 时给电机加了一个负载,转矩有一个非常短暂的升高调节,短暂波动后稳定输出。相比当前电机控制系统扭矩的脉动变化,方案在稳态和突加转矩条件下,输出的转矩始终保持平滑,满足设计预期的平顺输出。
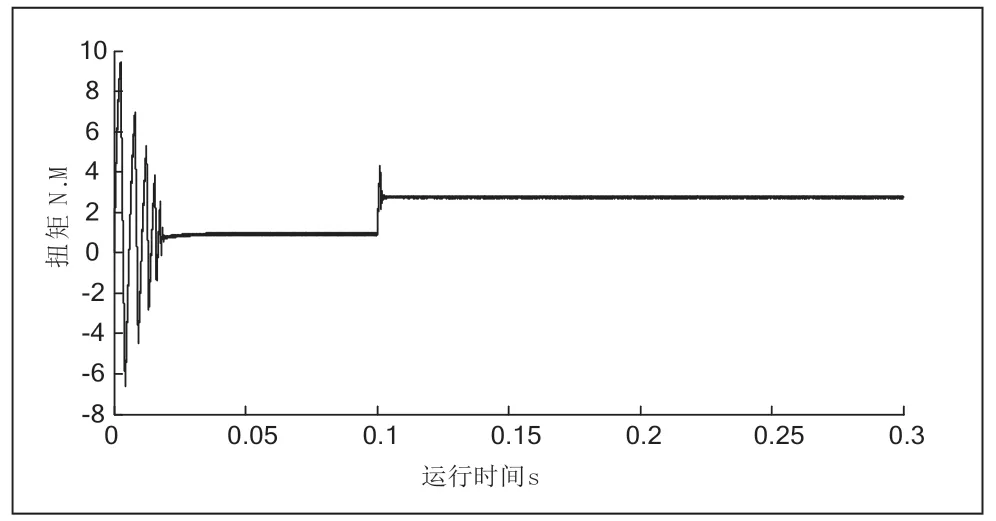
图9 突加转矩响应曲线
■4.3 转速响应仿真曲线分析
如图10 所示,电机启动后,转速在0.02s 内快速震荡升高,转子有一定的抖动。0.02s 后转子转速平稳。0.1s 后给系统突加负载后,转子转速经过一个微小的下滑后很快回到原速度,响应快且误差非常小,相比当前电机控制系统,速度脉冲变化,该系统的调速非常平滑,提升了驾驶的平顺性。
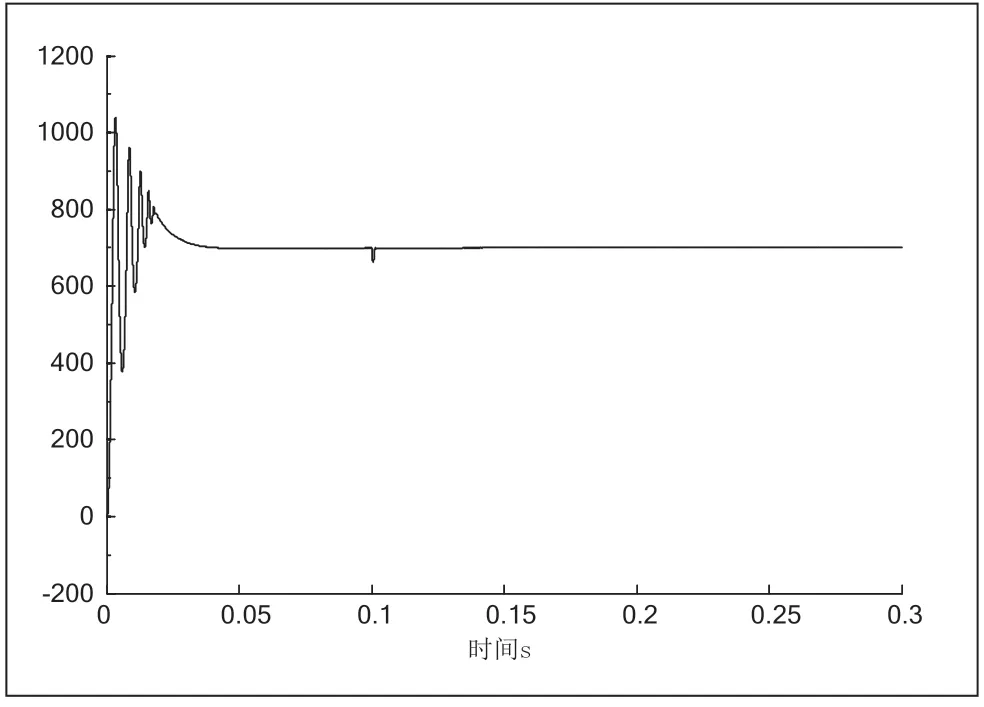
图10 交流伺服控制系统控制下的永磁同步电机转速响应曲线
■4.4 位置响应仿真曲线分析
如图11 所示,给系统一个位置信号,控制系统反馈的位置信号经0.4s 的响应时间后保持稳定,且角度变化匀速。说明电机控制系统可以控制电机位置,旋转的角速度也非常稳定,克服了当前控制系统不能定位,抖动的缺陷。

图11 交流伺服控制系统控制下的永磁同步电机位置阶跃响应曲线
5 电动汽车永磁同步电机交流伺服驱动系统台架测试
■5.1 控制器实物介绍
控制器强电和弱电分开设计,安放在两块板子上,通过接口连接。整体实物图如图12 所示,设计有RS232 接口连接电脑和控制器芯片。
图12 伺服驱动系统硬件实物
控制板如图13 所示,由DSP 和FPGA 作为控制核心,DSP 统筹整个控制流程,FPGA 主要负责算法运算。
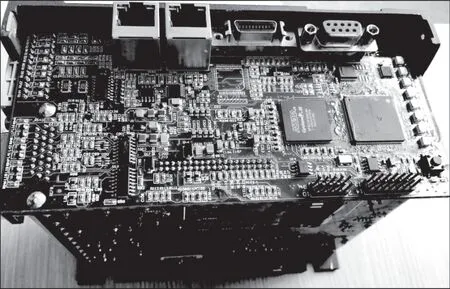
图13 伺服驱动系统控制板
功率板右侧下方的端口接动力电源,有接三相交流电接口,也支持直流电接在母线上,制动电阻外接。IGBT 驱动模块在左下的黄色金属盒中,用高速达林顿管驱动,DSP芯片发出的信号控制达林顿管。

图14 伺服驱动系统功率板
■5.2 实验台架介绍
实验台架如图15 所示,电机选择的是杭州米格3kW的伺服电机,配套绝对值编码器检测位置,直流电源给控制板供电。实验设备还包含测功机和示波器等。
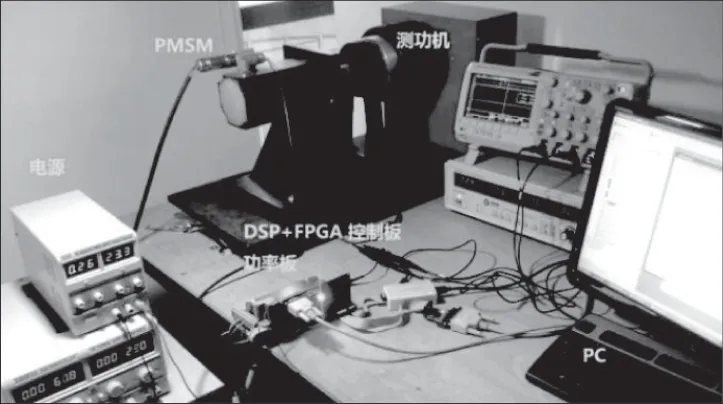
图15 电动汽车永磁同步电机交流伺服驱动系统实验台架
■5.3 电动汽车永磁同步电机交流伺服驱动系统测试结果分析
用实验台架测试电机在启动、空载和突加负载情况下的相电压、扭矩和速度等参数进行测试,来验证控制系统的性能。用220V 单相交流电供电,经整流装置提供给母线60V的直流电压,设置16kHz 的PWΜ 脉冲,速度和位置的采样周期为125μs。在DSP 程序中定义电机需要观察的参数,飞思卡尔编译软件中添加FreeΜaster 软件可以监控程序参数,用RS232 接口连接驱动板和电脑。
图16 为低速恒定负载下的电压,图中显示U、V 电流为正弦,W 相电流可根据其余两相计算获得。
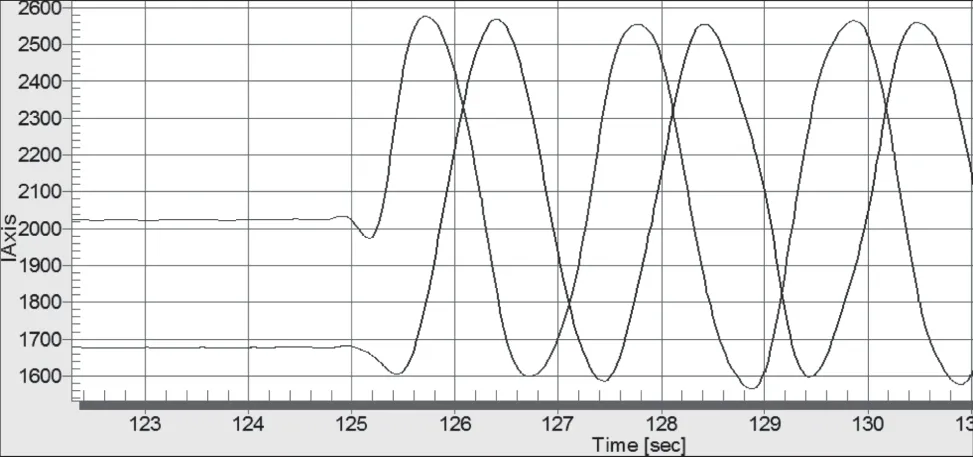
图16 FreeMaster 中显示的U、V 两相的电流
电机突加、突卸负载工况下id,iq电流响应图像曲线如图17 所示:id始终近似为0,iq的值紧跟随着负载的变化。说明随着电机负载的变化,电机同步改变输出电流,提供对应的扭矩。
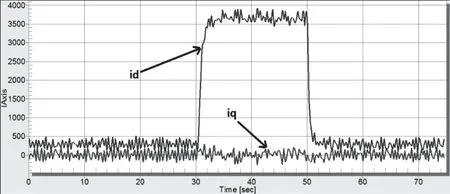
图17 负载变化下的 id 、 qi 电流曲线
给电机一个突然的加速指令,如图18 所示,一个红色阶跃曲线,实际曲线如图蓝色显示。当速度给定急剧变化时,速度跟踪非常好。表明系统的速度响应快速且稳定,无太大超调和震荡。
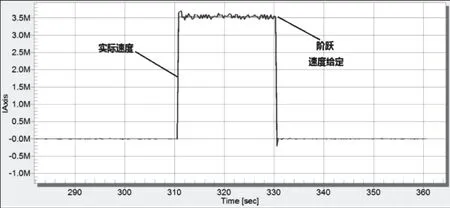
图18 突变速度指令下实际速度响应曲线
6 总结
提出一种用可控平滑正弦磁场推动转子正弦磁场运动的电机交流伺服驱动方案,研究控制永磁同步电机定子生成正弦旋转磁场的关键参数,通过PARK 变换/逆变换和CLAK 变换的方法转换参数,建立以id=0 的转矩控制方法,算出能生成旋转磁场的线圈空间矢量电压,研究用空间矢量调制技术实现电压矢量的调制,建立了位置、转速、转矩三闭环控制。经ΜATLAB/SIΜLINK 仿真和实物台架测试,主要工作整理如下:
(1)通过不同坐标系下的数学建模和公式推导,得出电机电磁转矩和iq成正比,励磁分量和电流di相关,而d、q 轴互不干扰,将电磁转矩和励磁拆分控制。
(2)将定子线圈上的电流值ia、ib、ic经Clarke 坐标转换,变成αβ坐标系下的两个量:iα和iβ,iα和iβ正交,进一步简化了电流表达式,相互关联的量得以拆分。
(3)继续用坐标转换方法将iα和iβ的值在d-q 旋转坐标系中表达,得到di和iq两个分量,通过分析对比,选用id= 0的矢量控制算法。
(4)通过公式推导,发现转子磁通和id的关系,iq和转矩的关系,以此通过公式计算出Ud和Uq的值。
(5)、Uq经坐标变换,转换成αβ坐标系下的Uα、Uβ,研究了SVPWΜ 变换方式,SVPWΜ 模块用Uα、Uβ计算出控制IGBT 脉冲的方法,最终定子线圈生成平滑可控的旋转磁场。
(6)进行了仿真验证和实物台架测试,验证了控制算法。
结果表明:恒定载荷下电机输出扭矩和速度误差在1%以内,角度误差1°,突加负载下扭矩和速度响应时间在0.01s以内,生成的旋转磁场,可平滑的推动转子运动,在启动、突加负载,变速和变位置情况下,磁场推动转子运动平稳、能加速减速和控制位置。相比当前纯电动汽车电机驱动系统,速度平滑可控、定位精确,增强了电动汽车驾驶的平顺性和可操控性,解决了汽车永磁同步电机控制过程中出现的抖动、噪声、系统不能控制电机减速、不能控制电机旋转位置的问题。
