基于北斗短报文的可信远程控制模型设计与验证
2022-12-18吴上李姗张凯娜刘益辰赵辰乾
吴上,李姗,张凯娜,刘益辰,赵辰乾
(中国船舶集团有限公司系统工程研究院,北京 100094)
0 引言
远程控制手段在军事、环境监测、渔业生产、森林防火、自动驾驶、电力巡检等诸多环境中得到了应用[1],能够有效减轻参与人员工作强度,提高工作效率。现有的远程控制手段主要基于4G、5G、Wi-Fi 或蓝牙,尽管有着部署成本低、开发难度小的特点,但通信范围受限于运营商网络建设力度或协议自身缺陷,安全性无法得到保障。如在军事领域,传统远程控制手段容易被敌方截获、篡改,影响国防安全,对信息链路的安全性要求很高,因此普遍采用光缆直连的方式,但其成本高,覆盖领域有限;环境监测、森林防火应用场景事关人民群众财产安全,一旦发生重大安全事故必须立刻上报至指挥中心,对信息传输可靠性要求很高;在自动驾驶领域,对车辆位置的高精度定位多基于超宽带通信(UWB,Ultra Wide Band)、高精度地图等,过于依赖相关基础设施建设,局限性较大。北斗卫星导航系统作为我国自主可控的卫星系统,其独有的短消息服务是一种覆盖范围广、链路稳定可靠的天基通信手段,开展基于北斗短报文的可信远程控制模型设计具有一定的研究意义。
1 传统远程控制手段
基于4G、5G和Wi-Fi/ 蓝牙通信技术实现远程控制是较为常见的远程控制实现手段[1],但其中4G 通信手段仅可满足对时延要求不敏感的应用场景,如野外地震台站监测[2]、农业灌溉设备控制[3]等;5G 通信具备增强移动带宽(eMBB,enhanced Mobile Broadband)、超大设备规模通信(mMTC,massive Machine Type Communications)、超高可靠性超低延迟(URLLC,Ultra Reliability and Low Latency Communications)的应用特点,特别适合于无人驾驶等[4]应用场景;Wi-Fi/蓝牙通信凭借其低功耗特点,特别适合于智能家居场景[5]。郝国锋等人基于4G 通信技术实现了对FPGA 的远程更新,熊勇良等人基于5G 技术实现了对无人机的远程控制[6],陈燕燕等人基于5G 技术实现了对机器人的远程控制[7],崔斌等人基于Wi-Fi 通信技术实现了对家庭环境的远程监测[8],陈立成等人基于Wi-Fi 通信技术实现了对智能型窗户的远程监控[9],以下对传统的远程控制方案分别进行展开介绍。
1.1 基于4G的远程控制
基于4G 的远程控制是使用我国已经广泛建设的4G通信网实现控制指令传输和消息回传,具有链路投入低、链路可靠、开发简单的特点。图1 是基于4G 的远程控制模型的基本流程图:

图1 基于4G的远程控制示意图
如图1,主机或服务器可从有线链路将控制指令经交换、路由设备发送至云端,云端接收后经4G 移动基站发送至4G数据传输模块(DTU,Data Transfer Unit),4G DTU 收到后将网络数据转换为串口数据,发送给终端设备,终端设备执行相应命令。移动终端还可从无线链路将控制指令经4G 通信基站发送至云端,云端接收后经4G 移动基站发送至4G数据传输模块,4G DTU 收到后转换为串口数据,发送给终端设备,终端设备执行相应命令。这种方案组网快捷灵活,方案设计简单,安全性能较好,但强烈依赖4G 网络的健壮性,对于边远山区、远海岛屿等4G 信号覆盖较差的应用场景并不适用。除此之外,4G 网络保密安全性较差,可在一定条件下被伪基站劫持流量,实现“中间人攻击”[10],因此对于保密性安全性要求高的场合并不适用。
1.2 基于5G的远程控制
作为新一代的通信技术,5G 移动网络具有超高可靠性和超低延迟的优点,基于此可设计基于5G 实现车辆全自动驾驶、无人机远程飞行控制,甚至是远程机械手外科手术的的应用方案,能够极大提高社会生产生活效率[11-12]。图2 是基于5G 的远程控制模型基本流程图:
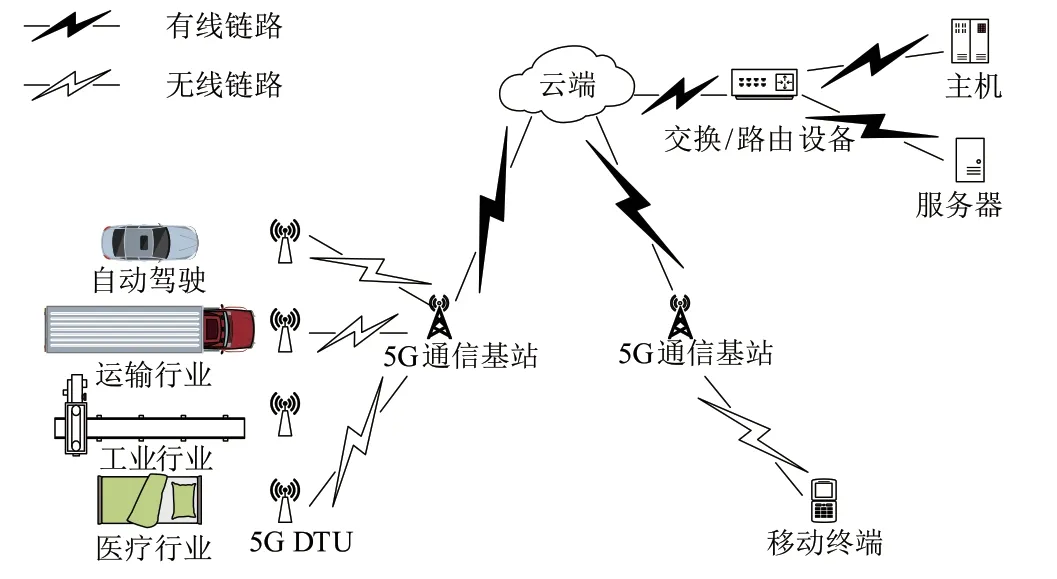
图2 基于5G的远程控制示意图
如图2,基于5G 的远程控制模型工作流程与1.1 节中内容相似,在此不再赘述,但此种方案的链路安全性更佳,5G的通信协议可有效防范伪基站、流量劫持等网络攻击[13]。同时,除了向下兼容基于4G 的远程控制流程应用场景外,基于5G 的远程控制模型还可发挥网络设备承载量大和延迟低的优势,支撑自动驾驶、交通运输、无人车间和远程医疗应用。
但是,这种方案强烈依赖5G 网络的健壮性,特别是对于自动驾驶、交通运输等移动场景,5G 网络运营商建设投入不足导致的通信信号不稳定对于系统正常运行和人身安全产生了巨大威胁。除此之外,5G 网络在提供高速率的同时,对于能量的需求也很高,以市面某型5G DTU 为例,其在采用低功耗技术的前提下仍有5 W 的功耗,而4G DTU 功耗则普遍在0.5~1.5 W 之间,二者相差两倍之多,因此基于5G 的远程控制模型并不适合在低功耗应用场景中使用。
1.3 基于Wi-Fi的远程控制
Wi-Fi、蓝牙都是常用的传感器近距离通信手段,一般用于环境感知、家电智能化等小型嵌入式系统设计[14-16],其典型工作流程如图3 所示。

图3 基于Wi-Fi/蓝牙的远程控制示意图
Wi-Fi/蓝牙、ZigBee、LoRa 均是常用的通信协议手段,因其具备相似的指标性能及局限性,在此仅选择Wi-Fi/蓝牙举例介绍。基于Wi-Fi/蓝牙的远程控制一般通过智能移动终端与终端设备上各自的蓝牙/Wi-Fi 模块实现,双方直接使用Wi-Fi 或蓝牙连接,中间没有数据中转流程,安全性、抗干扰性较好,且协议简单,方案成熟,能够有效降低部署成本。同时,基于Wi-Fi 的远程控制还能基于其免费、大传输带宽的特点实现大量数据下发等功能。二者共同缺点是作用距离受限,根据蓝牙技术标准,理想情况下(通视条件)民用产品的稳定通信距离只有20 m 左右,Wi-Fi 稍好但也只能达到5 km 左右[17]。虽然可以通过Wi-Fi-MESH 技术扩大作用范围[18],但作用距离终归有限,不能实现真正远距离的控制。
2 基于北斗短报文的远程控制方法
我国于1994 年启动了北斗研发计划,2000 年开始北斗一号建设,2004 年开始北斗二号卫星系统建设,2012年完成区域建设[19],2009 年启动北斗三号卫星导航系统建设,2020 年完成北斗三号卫星导航系统建设,北斗三号卫星系统由30 颗卫星组成,其中包含24 颗中轨道地球卫星、3 颗地球同步轨道卫星和3 颗地球倾斜轨道卫星,可提供2.5~5 m 定位精度[20]。Ming-Quan Hong 等人使用广播星历计算北斗和GPS 高频数据,并将结果用于设备的实时定位,证明了北斗基本能够达到GPS 的定位精度[21],定位误差优于0.48 m(R.M.S),授时精度优于19.1 ns[22]。北斗短报文是北斗相对于全球定位系统和格洛纳斯系统而言的特有功能,能够提供有限速率的双向短消息服务。收发北斗短消息需要配置专用的通信卡以获得唯一的终端号。北斗卫星导航系统具备良好的对地覆盖能力,其空间信号连续性达到99.99%,空间信号可用性99.78%[22],可靠性大幅领先于其他远程控制链路,因此使用北斗短报文实现远程控制具有一定的可行性。
2.1 基于SM4的短消息加密模型
北斗短消息在传输过程中采用了明文传输,极容易泄露敏感信息或遭到重放攻击,因此对短消息数据内容进行加密是十分必要的。国产密码算法简称国密,是我国有关部门认定过的密码算法,具有较高的安全性,常用的包括SM2、SM3和SM4 算法,其中SM2 算法是基于椭圆曲线密码学(ECC,Elliptic Curve Cryptography)实现的非对称加密算法,其计算复杂度、安全度很高,在密钥生成速度上比RSA 快百倍以上[23],但对于终端设备的计算能力要求较高,不适合于北斗终端设备使用。SM4 是一种基于分组的对称加密算法,在保证安全性的同时,其加解密流程相对简单,对终端设备计算能力要求不高,适合北斗终端设备使用。
根据北斗协议约定,短报文的包格式如图4 所示,为进一步节约计算资源,仅使用SM4 算法对数据内容部分进行加解密,使用专用服务器部署独立密钥管理生成服务用于管理证书、私钥。以某领域应用场景下发核心控制指令为例,首先双端设备从专用服务器获取密钥,然后将待发送的核心控制指令使用SM4 算法加密,加密指令经过链路到达接收端,接收端使用密钥解密获得原始核心控制指令,分配最后一个字节作为校验字节,通过对解密后的原始核心控制指令运行校验及纠错流程确定核心控制指令的完整性,检查无误后最后执行指令。详细过程如图5 所示。

图4 北斗短消息报文包格式
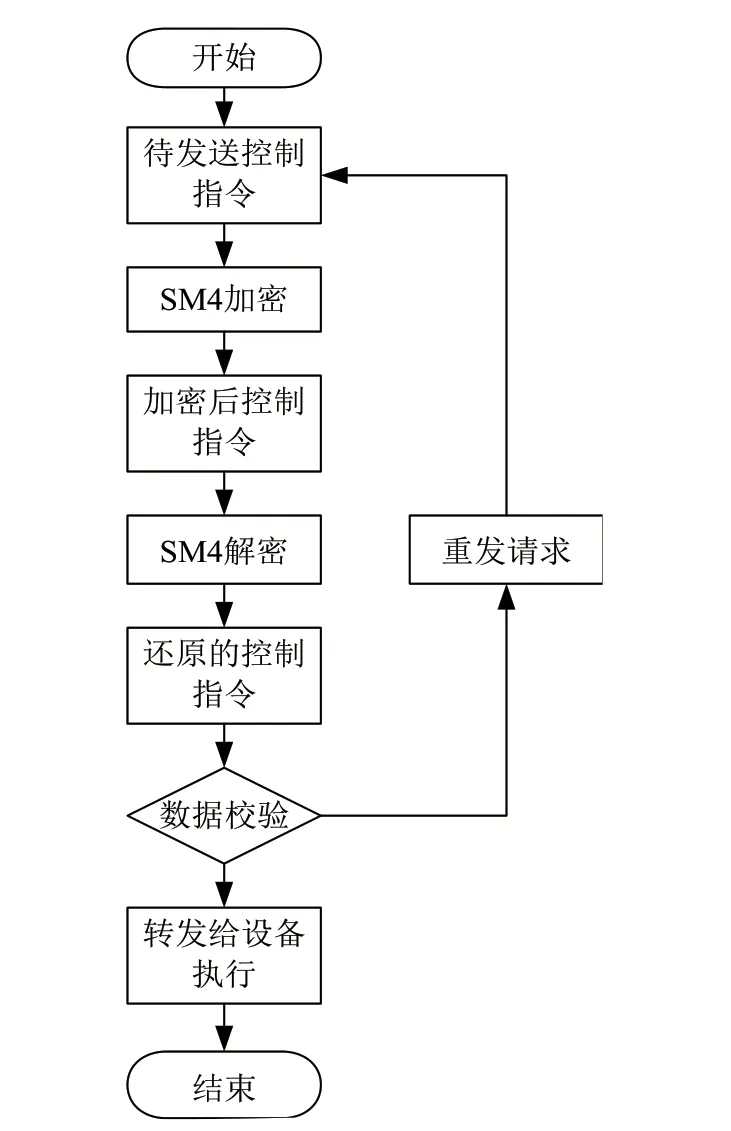
图5 北斗短消息报文加解密流程
2.2 基于北斗短报文的远程控制流程
频度指的是一个终端能够执行动作的最大频率,民用版本北斗通信卡可提供1 条/ 分钟的短消息发送频度,单条消息数据容量78 字节。实际工业应用中常使用多卡终端以增加短消息发送频度,即一个北斗终端安装多张通信卡,程序串行调用短消息发送接口以加快发送速率。本文计划采用2 个8 卡终端,双工通信速率为624 字节/分钟。基于北斗短报文的远程控制模型如图6 所示:

图6 基于北斗短报文的远程控制模型基本流程
部署有密钥管理生成服务的服务器负责生成、下发密钥给控制节点和被控节点,控制节点基于2.1 节的加密流程,使用分发的SM4 密钥对控制指令数据进行加密,经北斗DTU 传输给北斗卫星,经地面站转发后到达目标卫星,再下发至被控节点的北斗DTU。被控节点接收到之后,首先使用之前接收到的SM4 密钥解密,然后根据校验校验字节判断数据完整性,如果数据不完整,则尝试纠错或发送重传请求;如果数据完整,则还原出控制命令并执行。
3 实验结果
3.1 实验环境搭建
选用某型8 卡北斗终端设备2 台,分别部署在北京和广东惠州,两地相距约3 000 km,如图7 所示。同时两地各配备一台便携式笔记本电脑,硬件配置为i5-8250U、8 G RAM、512 G SSD,测试软件基于Windows 10 专业版和Qt5.0 开发运行,软件截图如图8 所示,界面包括接收消息显示界面、发送消息显示界面、待发送消息编辑界面、发送按钮等。

图7 实验环境示意图

图8 测试软件界面
3.2 加解密流程对于链路吞吐量的影响
加载基于北斗短消息的远程控制模型演示软件,北斗二代短消息最大容量为78 个字节,由于将最后一个字节作为数据校验字节使用,因此单次短报文最大容量为77 个字节,为充分探索链路最大吞吐量,拟将77 个字节全部使用,即B 设备向A 设备发送控制指令“AT+SEND=234007,‘发送测试发送测试发送测试发送测试发送测试发送测试发送测试发送测试发送测试12345’”,该指令模拟核心控制指令的下发流程,即使用北斗短消息向编号为234007 的客户端发送相关加密信息。为最大限度利用试验设备的发送频度,上述发送过程连续进行,计时10 分钟,记录A 设备收到的有效控制指令数量,得到数据组1。不加载加解密校验流程运行演示软件,执行同样动作,记录结果得到数据组2,结果如表1、图9 所示。数据组1 的平均吞吐量为575.1 Byte/min,数据组2 的平均吞吐量为580.4 Byte/min,由此可见加载加解密流程后链路吞吐量降低1%左右,说明加解密流程是高效的,对链路吞吐量影响十分有限。

表1 新增加解密流程前后链路吞吐量对比

图9 新增加解密流程前后链路吞吐量对比
3.3 加解密流程对于链路时延的影响
从信息流入链路开始,到信息流出链路终止,中间的持续时长即为链路时延。链路时延的大小能够有效说明链路能否及时传递关键信息,对于指令的及时下达具有重要意义,因此测试加解密流程对于链路时延的影响具有重要意义。为保证实验结果的有效性,首先手动设置两台笔记本电脑其向time.windows.com 同步时间,再加载加解密校验流程运行演示软件,B 设备向A 设备不断尝试发送控制指令,“AT+SEND=234007,‘发送测试发送测试发送测试发送测试发送测试发送测试发送测试发送测试发送测试12345’”,计时10 分钟,记录A 设备收到有效控制指令的事件和B 设备发送时间,并计算二者延时,得到表2;不加载加解密校验流程运行演示软件,执行同样动作,记录数据结果得到表3。其中表2 中丢包2 次,丢包率3.75%,平均传输时延10.59 s;表3 中丢包3 次,丢包率0.25%,平均传输时延12.1 s,每分钟内数据包延迟的平均值见图10,说明新增加解密流程后链路时延没有明显变化。

表2 新增加解密流程后链路时延表

表3 新增加解密流程前链路时延表

图10 新增加解密流程前后链路时延平均值对比
4 结束语
由于基于4G、5G 或Wi-Fi 的远程控制模型具有外部依赖性较强、安全性较差、作用距离近等局限性,本文设计了基于北斗短消息的可信远程控制模型,该模型通过我国自主设计实现的北斗卫星通信导航系统作为远程通信链路,并使用自主可控的SM4 分组对称加密方法对数据区进行了加密,能够有效提高远程控制链路的可靠性和安全性。最后本文使用8 卡北斗终端对以上设计进行了验证,测试结果表明,基于北斗短消息的远程控制模型能够达到97% 以上的传输可靠性,并能对传输数据进行信源分组对称加密。但这也带来了北斗短报文数据区利用率不高的问题,需要在后续研究中进一步完善提高。
