基于准比例谐振双闭环控制的电网模拟器逆变侧设计
2022-12-17张凯谢源刘浩李少朋贺耀庭
张凯,谢源,刘浩,李少朋,贺耀庭
(1.上海电机学院 电气学院,上海 201306; 2.上海电力闵行燃气发电有限公司,上海 200204)
0 引 言
随着全球经济快速发展,风能作为清洁能源,因其资源丰富、成本低、无污染等引起广泛关注,在研究风能发电系统的过程中,测试并研究风力发电系统在电网发生故障状态下的运行特性是必不可少的工作,实际并网时,可以在电网发生故障时提供一定的有功或无功支撑[1-3]。因电网故障的随机性和不可控性,所以研究能够模拟电网各种故障情形的电网模拟器有着重大意义[4]。
电网模拟器选择合适的拓扑结构有利于提高电压等级,减少输出波形的畸变率,提高模拟精度以及效率。电网模拟器的控制策略也是研究的重要一环,采用合适的控制策略直接影响到动态响应速度和稳态性能[5-6]。电网模拟器逆变侧根据需要输出测试风电机组所需的故障波形。传统的双闭环比例积分(PI)控制或比例积分微分(PID)控制[7],虽然易于实现,但其利用给定值与目标值的静差实现控制,被控量与给定目标值始终存在静差值。而采用比例谐振控制可以最大程度消除两者之间的静差值。文献[8]设计了兆瓦级的多功能电网模拟器系统,采用一种线路阻抗模拟的方案,但其采用三相控制无法实现单相电压的突变。文献[9]将重复控制和PI相结合来提高系统的抗干扰能力和动态响应速度。文献[10]将准比例谐振应用于单相光伏逆变器控制,其电流内环采用PI控制器,电压外环采用准PR控制器。文中将电压外环和电流内环均采用QPR控制,实现输出电压的无静差调节。文献[11]通过改进BP神经网络用于QPR来自适应调节补偿增益,提高了收敛速度与补偿精度。文中逆变侧连接被测设备,文献[11-12]并网连接需要控制并网电流,而文中主要控制输出电压的波形。文中将准比例谐振应用于电压外环和电流内环,相比于传统的PI控制能够有效的跟踪目标电压,减小输出电压的抖振。
1 电网模拟器的结构选择
电网模拟器的整体结构如图1所示,主要分为整流侧、逆变侧两大部分。其中,整流侧选用三相PWM整流电路,逆变侧采用单相全桥结构。

图1 电网模拟器整体结构示意图
2 电网模拟器逆变侧数学模型
2.1 电网模拟器逆变侧拓扑结构
文中主要对电网模拟器的逆变侧进行研究,逆变侧选用三个单相全桥逆变器,单相全桥逆变器电路结构如图2所示。
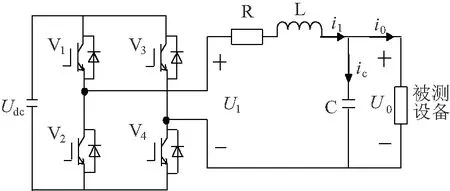
图2 单相全桥逆变器主电路图
电路中各个参数的物理意义见表1所示。

表1 拓扑图参数说明
2.2 平均状态空间模型
设V1、V2、V3、V4为理想开关器件,通断可由开关函数表示为:
(1)
采用SPWM调制,不考虑死区时,U1与直流输入Ed的关系为:
U1=SEd
(2)
由图2可得:

(3)
状态空间方程与所选状态有关,根据控制方法的特点选用不同的状态变量来推导状态空间模型。选用电容电压U0和电感电流i1作为状态变量,可得状态空间表达式为:
(4)
(5)
逆变侧的截止频率由输出滤波器的截止频率决定,而LC滤波器的截至频率远低于开关频率。因此状态空间平均模型为电网模拟器逆变侧的低频等效。
由式(4)和式(5)可知,对于不连续的非线性输入,平均处理后得状态空间平均模型。如图3所示,Ts为采样周期,Ton为开关器件开通时间,Vcm为三角载波幅值,Vrm.sinωt为调制波。
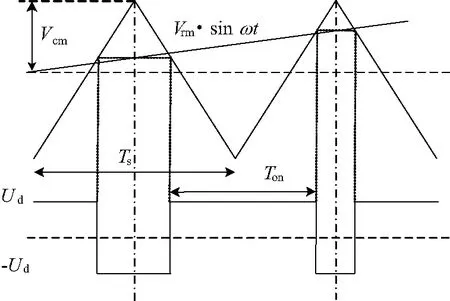
图3 线性调制原理图
(6)
因此,式(4)~式(6)组成了电网模拟器逆变侧单相的状态空间平均模型。假设文中直流母线输入为恒定,开关管为理想器件,开关频率远大于基波频率与截至频率,不考虑死区。
可推导出U1(s)和i0(s)为输入时系统的s域输出响应关系为:
(7)
对应的框图如图4所示,输出U0受扰动量i0的影响,i1又受扰动量U0的影响。

图4 单相逆变器主电路框图
2.3 逆变侧滤波器设计
逆变侧输出电压U0=400 V,容量10 kVA,输出基波频率50 Hz,等效开关频率40 kHz。逆变侧滤波器的控制目标:(1)总谐波含量满足电压质量标准:THD<5%;(2)滤除高频谐波,保留滤波器截止频率以下所需谐波。综合考虑LCL与LC滤波器的经济性与滤波效果,文中采用LC滤波器,如图5所示。

图5 LC滤波器电路图
由图5可得传递函数为:
(8)
(9)
式中ωL为LC谐振角频率;ξ为阻尼系数;U0(s)为滤波电路输出电压;Udc为滤波器输入电压;s为拉普拉斯变换算子。LC的截止频率为:
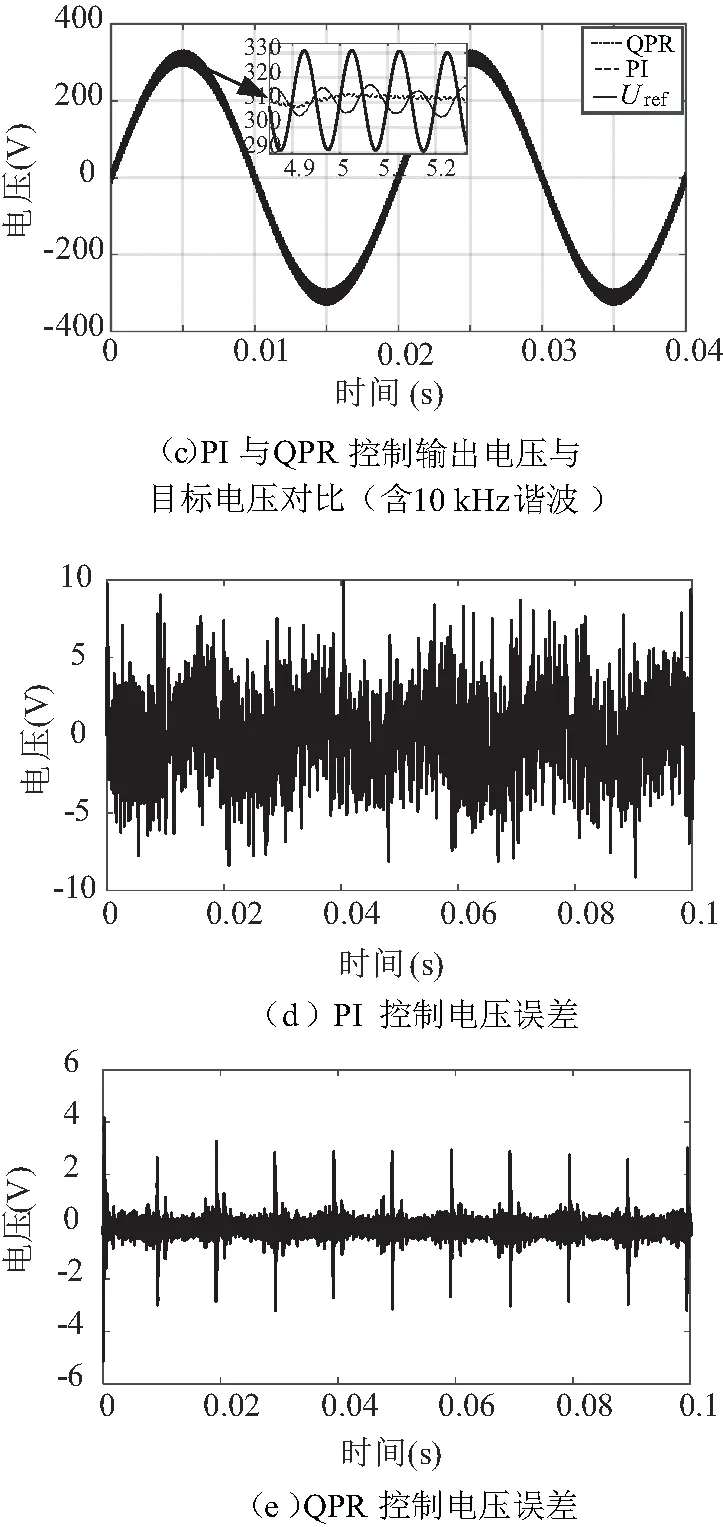
10f1 (10) 式中fharmin为最低次谐波频率;fL为LC截止频率频率;f1为基波频率取50 Hz。高频逆变器载波频率远大于基波的10倍以上,fL可选载波频率的1/10。滤波器无功为: (11) (12) (13) 把式(13)代入式(12)中: (14) 假设负载为阻性负载,可得: (15) (16) 将式(13)代入式(16)中: (17) (18) (19) 综合考虑,选取截止频率 4 kHz。由式(19)与式(13),可得L=3.1833×10-4H,C=4.9732×10-6F。图6为LC滤波器输出电压波形。 图6 LC滤波器输出电压波形 低于截止频率的谐波经过滤波器仍被保留,而高频的谐波则被过滤,可以满足对被测设备进行含低频谐波输出电压测试的要求。 对电网模拟器逆变侧进行模型建立,电网模拟器逆变侧采用电压外环电流内环双闭环控制,电流内环增大了系统的带宽,提高系统的动态响应,对扰动的适应能力加强,谐波含量减小。以电感电流作为内环反馈,能有效提升对负载电压的响应速度,但其无法对负载电流进行有效控制。而电感电流作为内环反馈可以有效的解决这一问题,但由于电感电流内环电压外环控制对负载的扰动的抑制能力不如电容电流内环控制,为了改善系统的抗扰动能力,文中在电感电流内环上加上负载扰动i0的前馈补偿来改善这一效果。 图7中α为负载电流的前馈补偿系数。采用数字控制时,一般取α<1;采用模拟控制时,当去取α=1时,内环等效于电容电流反馈控制,文中选取α=1。 图7 负载电流前馈的电感电流内环电压外环控制框图 考虑系统采样延迟及PWM开关器件延迟,在控制框图中加入延迟环节Td=1.5Ts,如图8所示。 图8 电流内环电压外环控制框图 传统的比例积分(PI)双闭环控制无法实现对交流信号的无静差控制,理想的比例谐振控制(PR)在基频点有无穷增益,传递函数为: (20) 式中Kp为比例系数;KR为谐振环节增益。相较于PR控制,准比例谐振(QPR)保持了PR控制在基频点高增益的特点,还扩宽了高增益区的带宽,在频率发生微小偏移时仍能实现很好的跟踪效果。准PR控制器的传递函数如下,其中ωc为截止频率: (21) 图9为控制原理图。 由图9可得传递函数: (22) 设电流、电压调节器分别为: (23) (24) 准比例谐振控制的参数选择,根据截止频率带宽需求选择ωc;由于KR和控制器的峰值增益成正比,根据峰值增益确定KR;系统比例增益随着Kp的增大而增大,因此根据比例增益需求选择Kp,使系统稳态性能和抗干扰性能最优化。文中根据控制系统的稳定性和抗干扰线要求,通过调整双闭环参数,选用合适的准比例谐振控制参数。 图9 逆变侧控制原理图 文中为了验证准谐振双闭环控制器的有效性,基于MATLAB/SIMULINK搭建了逆变侧仿真模型。选用参数为:Udc=700 V,负载侧电压有效值为220 V,L=4 mH,C=5 μF,fk=10 kHz,R=0.1 Ω,Td=150 μs,图10为QPR双闭环控制系统框图。 图10 QPR双闭环控制系统框图 图10中i0为负载电流扰动,α为电流前馈系数,此时取1。电流内环控制和电压外环控制均采用QPR控制,输入端为给定电压波形Uref,输出端为逆变侧的输出电压即被测设备两端的电压。 图11为开环运行时输出电压波形图,图12(a)为未加滤波器时的输出电压FFT分析图,波形畸变率(THD)达到了137%,通过LC滤波器后THD仅有0.98%,远小于国标GB/T 14549-93规定的5%。 图11 开环控制输出电压波形 图12 输出电压(负载电压) 如图13为采用QPR双闭环控制输出电压波形,由图可以看出输出波形谐波含量少,波形振荡小。 图13 QPR双闭环控制输出波形 按上述参数设定,给定波形幅值311 V,频率50 Hz,如图14所示输出电压波形与给定电压对比。 图14 QPR控制给定电压与输出波形对比图 针对给定电压波形的不同,将传统的PI-PI双闭环控制与QPR-QPR电压外环电流内环控制作比较,得到如图15(a),PI控制波形抖动大,QPR控制的电压波形更稳定,且更加贴近于给定电压波形。图15(b)和15(c)为 PI与QPR控制输出电压与目标电压波形对比图,分别为含幅值20频率1 kHz和10 kHz谐波,文中选用的截至频率为4 kHz,因此含1 kHz谐波的给定电压为精确地参考电压波形,如图15(b)相比PI控制QPR控制的输出电压波形与给定目标电压更加拟合。对于含10 kHz谐波的给定电压,所需电压波形应去除其高频谐波,采用QPR控制输出波形谐波少,波形振动小,输出电压即被测设备端电压控制稳定。 图15 PI控制与QPR控制对比 由仿真可得,两种控制策略均能追踪给定电压波形,为了进一步区分PI和QPR控制的精确性和有效性,图15(d)和图15(e)为给定电压和输出电压的误差曲线,QPR控制减小电压误差值和抑制抖动的效果明显优于PI控制。 为进一步验证文中所提QPR双闭环控制策略的有效性,采用FPGA为核心的控制器,RTLAB作为仿真主电路,通过控制器硬件在环CHIL(Control Hardware In Loop)验证控制的可行性,实验平台如图16所示。 实验参数设定:直流母线电压为700 V,被测设备侧端电压有效值为220 V,滤波电容为5 μF,滤波电感为4 mH,PWM开关周期为10 kHz。 可以得到PR控制的输出电压波形,如图17(a)所示,图17(b)为含谐波输出的电压波形,图17实验波形与仿真波形基本一致,证明了控制方法的有效性。 图16 基于RTLAB的CHIL实时仿真 图17 CHIL实验波形 文章对于电网模拟器选用了合适的拓扑,对单相逆变器控制进行建模分析,设计了合适的LC滤波电路。将准比例谐振控制引入电压外环电流内环,设计了QPR-QPR双闭环控制器,将其与传统的PI-PI控制进行比较,通过SIMULINK模型进行系统的仿真对比。仿真及实验结果表明,采用QPR双闭环控制,输出电压与给定电压的误差更小,波形的振荡小,且对目标电压的追踪能力强,能够有效削减抖振现象,提高输出电压的稳定性和精确度。



2.4 逆变侧双闭环控制


3 准比例谐振控制器的设计

4 电网模拟器逆变侧仿真






5 实验


6 结束语
