BDS3/GPS PPP-B2b定位收敛性能分析
2022-12-16包林鹏曾琪万丽华
包林鹏 曾琪 万丽华
0 引言
2020年8月BDS3正式建成并开通全球服务,该系统由24颗中轨道(MEO)卫星、3颗倾斜轨道(IGSO)卫星和3颗高轨道(GEO)卫星组成[1].BDS3系统除了提供全球定位导航授时(PNT)服务外,还提供短报文通信、国际搜救、星基增强(SBAS)和精密单点定位(PPP)等多种服务[1].其中,PPP服务就是通过3颗GEO卫星播发的PPP-B2b信号来实现的,目前依靠PPP-B2b信号所播发的26颗BDS3卫星的精密改正产品,可以实现实时动态分米级和静态厘米级的定位精度[2-3].
PPP-B2b服务和传统的实时动态定位(Real Time Kinematic,RTK)、网络RTK技术相比,用户可在不架设额外基准站的情况下在中国及周边任何区域实现厘米级定位精度,因而在海洋、农业等领域具有广泛的应用前景.PPP-B2b自开通以来,国内很多学者已经对其服务性能进行了大量的研究.许扬胤等[4]基于BDS3广播星历研究发现,BDS3卫星广播星历轨道精度在径向、切向和法向的精度分别可达0.18、0.6和0.6 m,广播星历钟差精度可达1.86 ns.黄伦文等[5]对PPP-B2b定位效果分析指出,BDS3精密改正产品在径向、切向和法向的精度分别可达0.07、0.33和0.24 m,钟差产品精度优于0.1 ns.Ren等[6]基于MGEX和IGMAS观测站数据研究指出,BDS3/GPS双系统PPP-B2b静态定位平均精度在N、E、U方向分别可达1.07、2.69和2.25 cm,不同测站收敛时间在8~22 min,动态定位平均精度在N、E和U方向分别可达3.60、5.90和9.40 cm,不同测站收敛时间在10~28 min.宋伟伟等[7]分别对B1I/B3I和B1c/B2a不同观测频点进行分析,结果表明采用B1I/B3I组合收敛速度略优于B1c/B2a组合.
PPP-B2b定位精度和收敛速度不但与卫星改正产品精度和卫星信号质量相关,与接收机伪距观测质量和精度也有直接的影响,然而国内外很少有学者对其展开详细分析.本文首先给出PPP-B2b定位数学模型及数据处理方法,采用不同类型的接收机进行实时PPP-B2b定位测试,并统计其收敛速度和收敛精度,然后结合伪距精度对PPP-B2b的收敛速度和定位精度进行对比分析,结果表明BDS3/GPS双系统PPP-B2b动、静态定位收敛速度均优于BDS3单系统,且伪距观测值精度对PPP-B2b收敛速度影响较大.
1 PPP-B2b定位模型与数据处理
1.1 精密单点定位模型
本文BDS3选用B1c/B2a频点,利用双频消电离层组合消除电离层延迟一阶项的影响,其伪距和相位观测方程[8]可表示为

(1)
LIF1,2=λIF1,2φIF1,2=ρ+c(dtr-dts)+T+

(2)

1.2 轨道改正
卫星轨道改正信息播发的是卫星在星固坐标系下径向、切向和法向的分量,在匹配CNAV星历后可以计算出卫星位置相应的改正向量δX,再根据广播星历播发的卫星位置Xbroadcast,利用式(3)进行轨道改正[9-11]:
Xorbit=Xbroadcast-δX,
(3)
式中,Xorbit为由轨道改正电文改正后的卫星位置,Xbroadcast为广播星历计算得到的卫星位置,δX为卫星位置改正项.δX的计算方法如下:
ealong=ecross×eradical,
δX=[eradicalealongecross]·δO,
(4)

1.3 钟差改正
钟差改正电文包括的参数是相对于广播星历钟差的改正参数,使用方法[9-11]如下:
(5)
式中,tsatellite为经过钟差改正后的卫星钟差,tbroadcast为广播星历计算得到的卫星钟差,C0为PPP-B2b电文中播发的钟差改正参数,c为光速.
1.4 码偏差改正
由于卫星跟踪模式不同,各观测值都包含一个与信号跟踪模式相关的偏差.同步处理各频率各类信号时,需要消除该偏差,其修正方法[9-11]如下:
(6)

2 伪距观测值质量与收敛速度分析
2.1 实验设计及数据采集
为了分析BDS3单系统及BDS3/GPS双系统收敛速度和收敛精度,分别选用A、B两台不同类型的接收机进行测试,采集时间为2022年年积日147~148,采样间隔为1 s,接收机并排放置于楼顶,记录实时数据流和BDS3/GPS双系统PPP-B2b改正数据,并每隔2 h自动重启.
同时为了分析PPP-B2b的绝对定位精度,两台接收机的参考坐标通过与周边上海华测导航技术股份有限公司的“华测一张网”CORS站联测得到.统计两台接收机各时段的收敛精度时,收敛精度定义为BDS3单系统收敛30 min、BDS3/GPS双系统收敛20 min后1 h内95%置信度的定位误差统计.收敛成功率定义为BDS3单系统水平外符合精度优于0.3 m、高程优于0.6 m,BDS3/GPS双系统水平外符合精度优于0.2 m、高程优于0.4 m的时段点总时段的比例.
2.2 PPP-B2b收敛效果分析
PPP-B2b改正电文提供了多系统的轨道钟差改正数,目前常用的为BDS3单系统与BDS3/GPS双系统PPP定位模式.利用式(3)—(6)分别对轨道、钟差及码偏差进行改正,进行BDS3单系统及BDS3/GPS双系统事后仿实时动、静态PPP-B2b定位解算.以年积日148的UTC时03:00:00—05:00:00时段的结果为例,其结果定位曲线如图1所示.

图1 BDS3单系统及BDS3/GPS双系统PPP-B2b定位时序Fig.1 Positioning results of BDS3 and BDS3/GPS
由图1可以看出,BDS3/GPS双系统相比BDS3单系统PPP-B2b定位收敛速度更快,两种模式均能在15 min以内收敛到平面分米级精度.另外由于参与解算卫星数差异,BDS3单系统在高程方向上的收敛精度相比BDS3/GPS双系统略差.
为了分析两厂商不同接收机各时段收敛效果,将两台接收机分别采用BDS3单系统和BDS3/GPS双系统观测值进行仿实时PPP-B2b定位,并统计17个时段静态(Static)、仿动态(Kinematic)的收敛精度,其结果如图2—3所示.
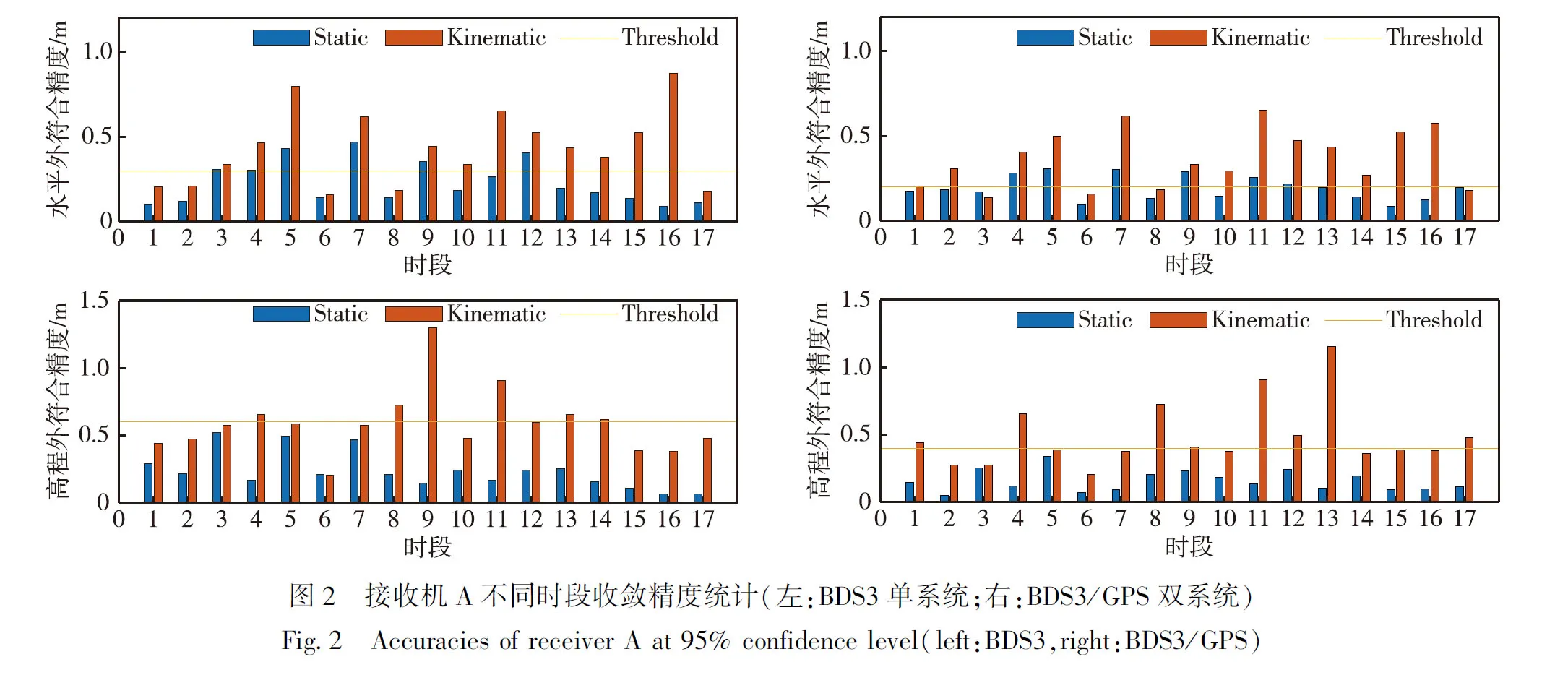

图3 接收机B不同时段收敛精度统计(左:BDS3单系统;右:BDS3/GPS双系统)Fig.3 Accuracies of receiver B at 95% confidence level(left:BDS3;right:BDS3/GPS)
由图2可以看出:对于接收机A的收敛成功率,BDS3单系统静态定位为水平70.6%、高程100%,仿动态定位为水平29.4%、高程64.7%,而BDS3/GPS双系统静态定位为水平64.7%、高程100%,仿动态定位为水平23.5%、高程52.9%.由图3可以看出:对于接收机B的收敛成功率.BDS3单系统静态定位为水平88.2%、高程100%,仿动态定位为水平41.2%、高程94.1%,BDS3/GPS双系统静态定位为水平88.2%、高程94.1%,仿动态定位水平为76.5%、高程94.1%.整体来看,接收机B的收敛成功率显著优于接收机A.
表1给出了所有时段的收敛精度统计结果.
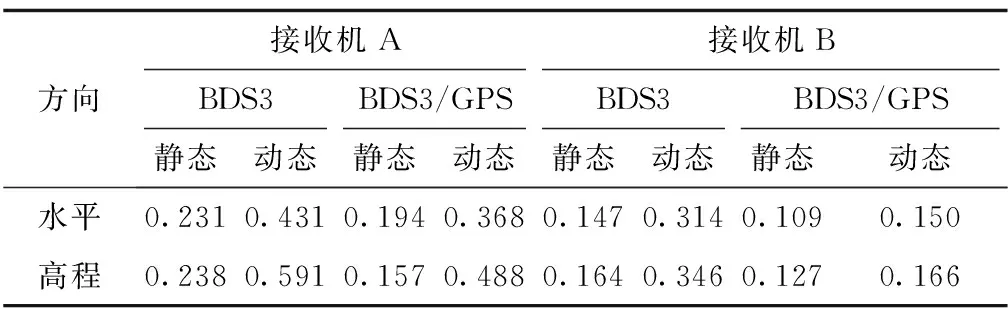
表1 单BDS3及BDS3/GPS收敛平均外符合精度
由表1可知:接收机A采用单BDS3观测值进行PPP-B2b定位,静态收敛外符合精度可以达到水平0.231 m,高程0.238 m,采用BDS3/GPS双系统观测,收敛精度可以达到水平0.194 m,高程0.157 m;接收机B采用单BDS3观测值,静态收敛精度可以达到水平0.147 m,高程0.164 m,采用BDS3/GPS双系统,收敛精度可以达到水平0.109 m,高程0.127 m.
动态外符合收敛精度明显差于静态定位.另外,接收机B各定位模式下收敛精度均优于接收机A.
2.3 伪距观测值质量与收敛速度关联性分析
两台接收机观测时段和环境完全相同,使用的算法固件版本也均一致,但收敛精度和收敛成功率差异较大.另外,即使对于同一接收机,不同时段的收敛性能也存在差异.为了进一步分析原因,本文挑选个别时段对两台接收机的伪距观测值精度进行残差分析.
以年积日148上午08:30:00—10:30:00时段两台设备同时观测的两组数据为例,两组数据静态、动态收敛曲线分别如图4—5所示.可以看出,接收机A静态定位收敛较慢,收敛1 h后定位曲线仍存在波动,仿动态定位模式收敛速度更慢,而同时段观测的接收机B收敛速度较为正常,且收敛精度较为稳定.

图4 接收机A PPP-B2b收敛时序Fig.4 PPP-B2b convergence series of receiver A

图5 接收机B PPP-B2b收敛时序Fig.5 PPP-B2b convergence series of receiver B
为了分析收敛速度与伪距观测值精度的关系,采用固定真值坐标反算伪距残差的方案进行验证,此时伪距残差基本可以反映伪距观测值的精度.为了方便查看,仅输出两接收机同时跟踪到的BDS3系统中的C21、C22、C34、C44及GPS系统的G02、G05、G16、G20卫星验后残差,其结果如图6所示.

图6 部分卫星伪距验后残差序列(左:接收机A;右:接收机B)Fig.6 Residual series of pseudo-range of some satellites(left:receiver A;right:receiver B)
可以看出,对于接收机A,BDS3和GPS各卫星的伪距残差波动较大,部分卫星如G02、G16残差波动达到5 m,而接收机B的各卫星伪距残差波动比较平缓,基本都在1.5 m以内.
在PPP-B2b初始定位阶段,模糊度参数尚未收敛,伪距观测值精度越高,为整周模糊度参数提供的基准就越准确,收敛速度也就越快.为探究接收机A伪距观测值精度差是否为普遍现象,本文对两接收机同时段测得的17组数据进行伪距残差分析,将残差(单位:m)划分[0 0.5]、(0.5 1]、(1 2]、(2 3]以及>3的5个区间,统计两种接收机的伪距残差分布如图7所示,同时统计平均伪距精度如表2所示.

图7 接收机A、B伪距验后残差分布Fig.7 Distribution of pseudo-range residuals for receiver A and receiver B
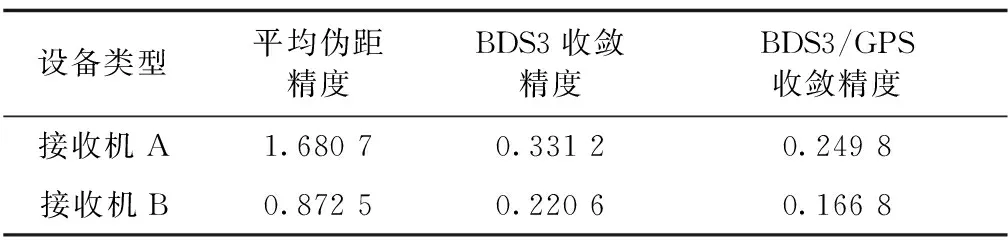
表2 平均伪距精度与收敛精度对比
由图7可以看出:接收机A伪距验后残差普遍较大,小于1 m的比例不足40%,另外还存在部分残差超过3 m,可见接收机A的伪距观测值精度较差;接收机B伪距残差在1 m以内的比例达到70%,2 m以内比例达到97%,精度明显优于接收机A.由表2可以看出,接收机B平均伪距精度优于1 m,相比接收机A高出48.1%,其收敛速度也更快,BDS3单系统和BDS3/GPS双系统收敛精度相比接收机A分别提升33.4%和33.2%.
3 结论
本文基于两台接收机的观测数据,分析了目前PPP-B2b精密单点定位的收敛性能,并在此基础上研究了伪距观测值精度对于收敛速度的影响,得到结论如下:
1)采用BDS3单系统进行PPP-B2b定位,静态收敛精度为水平方向优于0.15 m,高程方向优于0.17 m;仿动态收敛精度为水平方向优于0.32 m,高程方向优于0.35 m.
2)采用BDS3/GPS双系统进行PPP-B2b定位,静态收敛精度为水平方向优于0.11 m,高程方向优于0.13 m;仿动态收敛精度为水平方向优于0.16 m,高程方向优于0.17 m.
3)伪距观测值精度对于PPP-B2b收敛速度影响较大,在平均伪距精度提高0.808 m后,单BDS3及BDS3/GPS双系统分别提升33.4%和33.2%.
