复杂环境智能手机RTK/DR车载组合定位方法
2022-12-16王付有高成发甘露张瑞成王剑超
王付有 高成发 甘露 张瑞成 王剑超
0 引言
车辆导航是智慧交通、智能车快速发展中不可或缺的一项,关系着快速寻路、规避拥堵、提高交通运转率等切实需求[1].随着硬件传感器的普及,车辆定位的方法也从单GNSS定位,扩展到GNSS接收机、惯性导航系统[2]、激光雷达[3]、里程计[4]等设备的融合定位.而对于用户而言,手机作为出行必不可少的设备,在大多数情况下承载着导航定位的任务.
现如今实时动态RTK定位已经在部分机型实现,且能够在开阔的环境下发挥稳定作用,而在复杂环境中,定位精度及稳定性均难以保证[5].智能手机内部集成的惯性传感器为航位推算(Dead Reckoning,DR)提供了可能,而实际应用中,低成本的惯导设备数据精度较低,短时间的积分运算即带来较大的速度、姿态、位置误差.此时RTK、航位推算的松组合结果会跟随RTK结果变化,难以带来精度上的有效提升.
影响航位推算过程精度的因素主要是航向角.航位推算过程中,通过角速度、加速度积分更新的航向角误差积累较快,有必要进行航向角的实时修正.航向角的修正一般围绕着车辆运动状态和场景信息进行,有零速修正[6]、道路线约束[7]、直线检测[8]、地图匹配[9]等方法.常规的地图匹配是将定位点纠正到道路当中,对地图精度要求较高.目前可获取的开源地图OSM(OpenStreetMap)数据在点位精度上较低,但几何精度较好[10],具备修正航向角精度水平,因此本文采用了基于OSM地图匹配的航向角修正方法.首先,根据RTK/DR融合定位结果、航向角、点投影依次筛选,得到候选匹配道路线,再结合车辆运动状态、垂线距离、路线长度选择出最符合的行驶道路,最后使用该道路的方向来纠正航向角.在OSM地图数据的辅助下,航位推算的航向角与车辆的行驶方向更加一致.
智能手机RTK为抗差Kalman滤波浮点解,解算后与航位推算结果进行松组合,最后使用标准Kalman滤波对速度和位置进行估计.此外,本文增加了松组合的开关,结合RTK抗差Kalman解算待估参数的协方差阵Pk、车辆运动方向、RTK定位航向角变化量综合判断是否进行量测更新,以此减小RTK的严重漂移对松组合结果的影响.
1 关键算法
针对手机GNSS定位易受环境影响、手机内部传感器精度低等问题,本文提出一种RTK/DR组合定位方法,在RTK/DR松组合的基础上,设计了地图匹配算法,充分发挥OSM数据在航向角修正和松组合开关中的作用,进一步提升智能手机在复杂环境的定位精度.
算法流程主要有:
1)手机RTK定位;
2)航位推算;
3)航向角修正;
4)RTK/DR松组合.
1.1 手机RTK定位
智能手机通过网络连接校内基站,实时接收并解码基站观测数据,与手机原始观测值依次星间差分、站间差分,组成双差模型,并使用抗差Kalman滤波对位置、速度、加速度、双差模糊度进行估计[11-12].手机实时动态RTK难以固定模糊度,模型中使用浮点解进行解算.双差观测方程如下:
(1)
(2)
式中:1代表流动站,2代表基准站,s为其他卫星,r为参考卫星.在短基线下,双差模型大幅削弱了电离层延迟、对流层延迟的影响,消除了卫星钟差及测站接收机钟差.
手机采用的抗差方案[13]如下:
(3)
(4)
(5)

1.2 航位推算
航位推算是一种相对定位技术,基本原理为已知起算点姿态、速度、坐标,根据传感器采集到的信息去计算下一时刻载体的姿态、速度和位置,循环往复来完成一段时间的导航任务[14-15].
航位推算包括起算点初始化、速度更新、航向角更新、位置更新四个过程.起算点初始化可利用的信息有限,只能通过RTK定位进行赋值,具体公式为
(6)

速度更新方式与式(6)一致,其准确度与航向角的精度密切相关.
航向角更新为姿态更新的一部分,采用智能手机100 Hz采集的惯导传感器数据进行解算.惯导姿态更新算法参考严恭敏教授开源PSINS工具箱代码,获取到手机采集的加速度、角速度、重力加速度后,进行四元数更新.将四元数转换为姿态矩阵,最后计算出欧拉角,如下所示:
(7)
(8)
式中:q0至q3为手机四元数;φ,θ,γ分别为航向角、俯仰角和侧滚角.
位置更新基本公式为
(9)
式中:vn,ve,vu分别为北向、东向、天向的速度;dt为RTK定位时间间隔;Rm为子午圈主曲率半径;Rn为卯酉圈主曲率半径.
1.3 航向角修正
航向角修正策略就是通过地图匹配获取当前行驶路线,使用路线的方向来纠正.地图采用开源的OSM数据,其质量经学者分析,位置精度不高,但几何精度较好,具备修正航向角的能力.
地图匹配通常有点到点、点到线、线到线的传统方法[16],也有基于隐马尔可夫[17]的概率方法,考虑到定位的实效性本文采用点到线的匹配方法.基本思路为:根据上个历元的融合定位结果,筛选出周围50 m以内的道路线段;根据此前航向角,筛选掉相差超过20°的线段,再去除点投影之外的线段,即可得到候选的路段;最后根据点到线最短垂线距离找到符合的线段,使用该线段的方向修正航向角.由于OSM地图位置精度有偏移,因此存在匹配到相邻车道的情况,而本文只使用道路的方向信息,所以平行的道路线段方向不影响对航向角的修正.
OSM地图的道路在转弯时,突变的角度与车辆平滑的角度变化相矛盾,因此航向角修正更适合在直线路段进行.本文实时记录惯导姿态更新后的航向角,当航向角连续2 s变化量超过3°,即可认为车辆处于转弯状态,从而停止航向角的修正,修正的具体效果将在实验部分给出.
1.4 RTK/DR松组合
RTK、DR松组合采用基本Kalman滤波,对手机的位置和速度进行估计,其状态方程和量测方程为
(10)
状态方程表达的是上一时刻的状态到当前状态的一个转变,状态转移矩阵Φk/k-1描述了状态的转换过程,其构成为
(11)
式中:dt为惯导数据采样时间间隔,Bk为纬度.量测方程中Zk为RTK定位得到的三维坐标和速度.
状态更新和量测更新按照式(12)进行:
(12)
式中:Rk为观测信息的方差矩阵,对应位置和速度的噪声,本文使用RTK抗差Kalman滤波后的协方差阵Pk来对Rk赋值;Hk为松组合的系数矩阵.
在道路两边均是高楼的复杂环境下,RTK定位结果会出现跳动或者漂移,给松组合引入较大的误差,也给后续的航位推算带来错误的起算点.针对这种情况,本文增加了松组合开关,结合RTK抗差Kalman滤波后的协方差阵Pk、车辆运动方向、RTK定位航向角变化量综合判断是否进行松组合中的量测更新.将Pk的位置方差值从WGS84坐标转为东北天坐标系,并计算平面的误差ep,作为判断定位质量的一项指标.当ep大于2、车辆运动方向呈现直线、RTK定位的航向角变化量大于10°,本文即认为RTK存在漂移或者跳动,此时松组合仅进行状态更新,而不进行量测更新.
2 实验及结果分析
2.1 实验方案
本次实验场地为东南大学九龙湖校区,车辆按照图1的路线行驶,起点和终点均为开阔的白色点,共行驶3圈.设备安装如图2所示:木板的两端各固定一个测地型接收机,用于计算手机的真实参考坐标;采用的手机为华为P30与P40,通过支架固定在木板上.实验过程中,手机预先安装团队开发的定位软件,实时接收校内基站观测数据,并进行RTK定位,同时存储手机的加速度、角速度、磁强度、重力加速度、GNSS原始观测值信息.RTK定位频率1 Hz,惯性传感器数据采样频率设置为100 Hz,事后进行RTK、航位推算的组合解算.

图1 车辆行驶路线Fig.1 Vehicle route

图2 设备安装位置Fig.2 Equipment placement
2.2 航向角修正结果分析

图3为航向角修正前后的航位推算轨迹,对应着表1中的P40-2,横坐标加上118.8°为实际的经度,黑色为测地型接收机解算的基准轨迹,红色为仅进行初始对准的航位推算轨迹,蓝色为经航向角修正的航位推算轨迹.图3显示,纯航位推算的航向角误差逐渐积累,偏离黑色的基准轨迹,而航向角修正后,航位推算的轨迹与基准轨迹更加平行一致.结合表1和图3,可以说明地图数据的引入能够有效控制航向角误差累积.
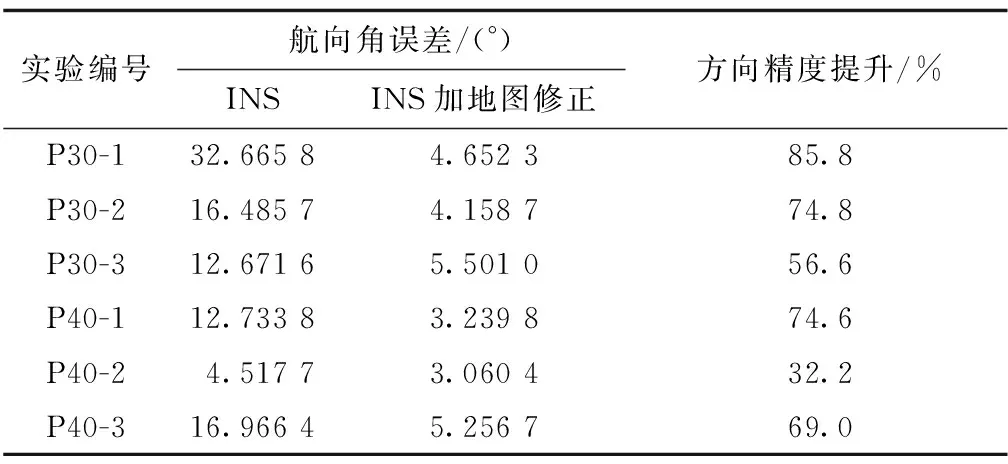
表1 航向角误差统计

图3 航位推算轨迹对比(横坐标加118.800°为实际经度)Fig.3 Comparison of dead reckoning trajectories
2.3 定位误差统计
方向修正后,航位推算在位置上仍与基准有偏差,需要与RTK组合进一步提升精度.图4给出了RTK、航位推算组合后的定位轨迹对比,对应着P40手机的第2圈,横坐标加上118.8°为实际的经度.黑色代表测地型接收机的基准坐标,红色代表手机RTK实时定位结果,蓝色代表RTK、航位推算组合定位结果.可以看到,在轨迹图上方,红色的RTK轨迹由于两侧高楼影响,定位出现了漂移,此时算法检测到RTK的异常,仅进行松组合的状态更新,而不进行量测更新,从而得到与基准更符合的定位轨迹.
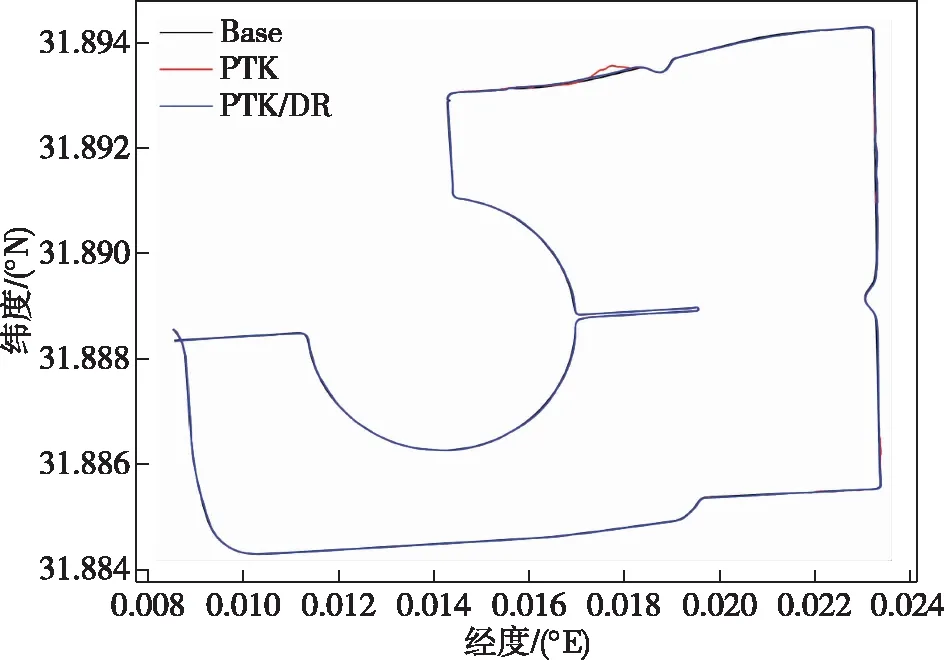
图4 松组合定位轨迹(横坐标加118.800°为实际经度)Fig.4 Loose combination positioning trajectory
本文按照手机进行分组,统计了P30、P40手机3圈的定位结果,如图5所示.可以看到,部分时间段,RTK存在着超过5 m定位误差,而同时间段的RTK、航位推算组合定位性能明显提升,有效抑制了大幅跳动的误差点.
表2统计了2种定位方式下的均方根误差,每台手机3组结果.数据显示:有5组实验RTK、航位推算组合定位平面精度优于RTK;P30的第2组实验中N方向精度有所改善,E方向精度不佳,平面精度2种定位方式相当;6组实验中,组合定位精度最好达到1.512 7 m,最差2.052 7 m;相比于仅使用RTK定位,组合定位精度提升幅度最大的为P40-2实验,达到19.4%.结合图4、图5及表2,可以得到结论:航位推算的加入能够在复杂环境下平滑轨迹、降低侧向漂移.

图5 手机定位误差Fig.5 Mobile phone positioning errors

表2 定位结果均方根误差统计
3 结束语
在智能手机车载导航场景下,针对手机RTK在复杂环境下易发生漂移或跳动、手机惯性导航航向角易发散等问题,本文提出一种智能手机RTK/DR组合定位方法.利用OSM地图数据,经地图匹配修正惯导姿态更新的航向角,结合RTK抗差Kalman解算中的协方差阵、车辆运动方向、RTK定位航向角变化量设置了松组合的开关,最后采用标准kalman滤波估计松组合结果.
本文采用了P30、P40两台智能手机,对比了航向角修正前后的航位推算、组合定位与手机RTK定位的精度.从实验结果来看,OSM数据能够有效削弱航向角的发散,大幅提升方向精度,使纯航位推算能够获得与测地型接收机平行一致的轨迹.组合定位结果在大部分实验中获得了优于RTK的定位结果.轨迹图表明:算法能够有效识别RTK误差较大的路段,使得航位推算能够按照更准确的方向进行状态更新.6组实验结果中,组合定位相比于仅使用RTK定位,精度最高提升达19.4%.
本文的航位推算过程中,虽然在方向上彻底摆脱了对RTK的依赖,但在速度上使用的是RTK的速度投影,对RTK大幅跳变的漏判会导致航位推算的结果偏离实际轨迹.在速度上摆脱RTK,以及更准确的RTK跳变判断将挖掘出航位推算更大的潜力.
