具有时变通信拓扑的多无人机系统编队控制
2022-12-14李大卫郑百东戴洪德
刘 伟,李大卫,郑百东,戴洪德
(海军航空大学, 山东 烟台 264000)
1 引言
近年来,多无人机系统的分布式控制问题得到了广泛而深入的研究[1-3]。与单个无人机相比而言,多无人机系统的特色明显。该系统可以通过多平台协同工作完成更为复杂的任务。由于多无人机系统中平台数量往往较多,平台之间还存在一定的通信耦合。因此,如何基于局部信息有效的控制整个系统是需要重点研究的内容。这其中的一个热点问题即是无人机的编队控制[4-10]。
近年来,多智能体系统的一致性控制理论被大量的应用到多无人机系统的编队控制问题中[11]。通过恰当的变量替换,可以将多无人机系统的编队控制问题转换为多智能体系统的一致性控制问题,进而通过设计分布式一致性控制器,实现无人机的编队控制,该技术取得了大量的研究成果。文献[12]针对带有噪声的一阶线性积分系统模型,在固定通信拓扑条件下,利用一致性控制理论设计了编队控制器。在固定有向拓扑条件下,文献[13]针对具有非线性动力学模型的多无人机系统,利用反馈线性化技术进行线性化,进而设计了具有虚拟领航者编队控制器。文献[14]针对一般线性多智能体系统,分析了同时具有领导者和输入扰动编队控制问题。文献[15]针对具有一阶积分系统模型的多无人机系统,研究了通信拓扑连通时多无人机系统的固定时间编队队形变换问题。在固定拓扑下,文献[16]提出了基于级联系统理论和输入约束的编队控制方法。文献[17]通过构建人工势场,在固定无向通信拓扑条件下,利用一致性理论设计了无人机协同避障控制算法,该算法可实现无人机之间以及无人机与障碍物之间的避碰。文献[18]利用反步自适应控制方法实现了固定翼无人机的编队。文献[19]基于主-从无人机通信架构,建立了多无人机系统的编队控制器,并设计了系统的任务分配算法,实现了编队队形的重构。当外界存在干扰时,文献[20]基于扩张状态观测器方法,对系统模型中存在的不确定性进行估计,设计了抗干扰时变无人机编队控制器。在实际应用中,无人机之间的通信可能会受到通信距离有限、障碍物阻挡、通信链路不稳定等因素的影响,通信拓扑结构往往会发生变化,难以始终保持固定不变。为此,文献[21-24]针对切换通信拓扑下的多无人机编队控制问题,基于不同的控制策略进行了研究。
由上可以看出,由于多无人机系统中个体通过通信或传感器网络耦合在一起,网络拓扑的结构及相应图的拉普拉斯矩阵的性质必然影响无人机的编队形成。因此,本文从分析用于描述信息耦合拓扑结构的拉普拉斯矩阵的性质入手,研究系统在切换通信拓扑条件下无领导者多无人机系统的编队保持问题。本文的一个重要贡献是基于现有成果,给出了无向图的拉普拉斯矩阵的一类性质(如引理3所示),结合构建的编队误差向量,介绍了一类多无人机系统编队控制分析方法。
2 基本概念

引理1[25]:如果G是无向图且是连通的,则零是拉普拉斯矩阵L的简单特征值,其他非零特征值均为正数。
3 问题描述
考虑由N个无人机组成的多无人机系统,各无人机具有如下相同的系统模型:
(1)
式中:xi∈Rn为无人机的状态;ui∈Rp为无人机输入;A和B为系统矩阵。
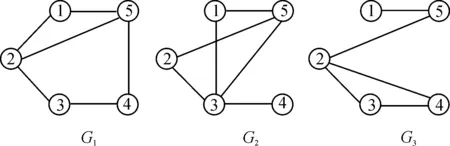
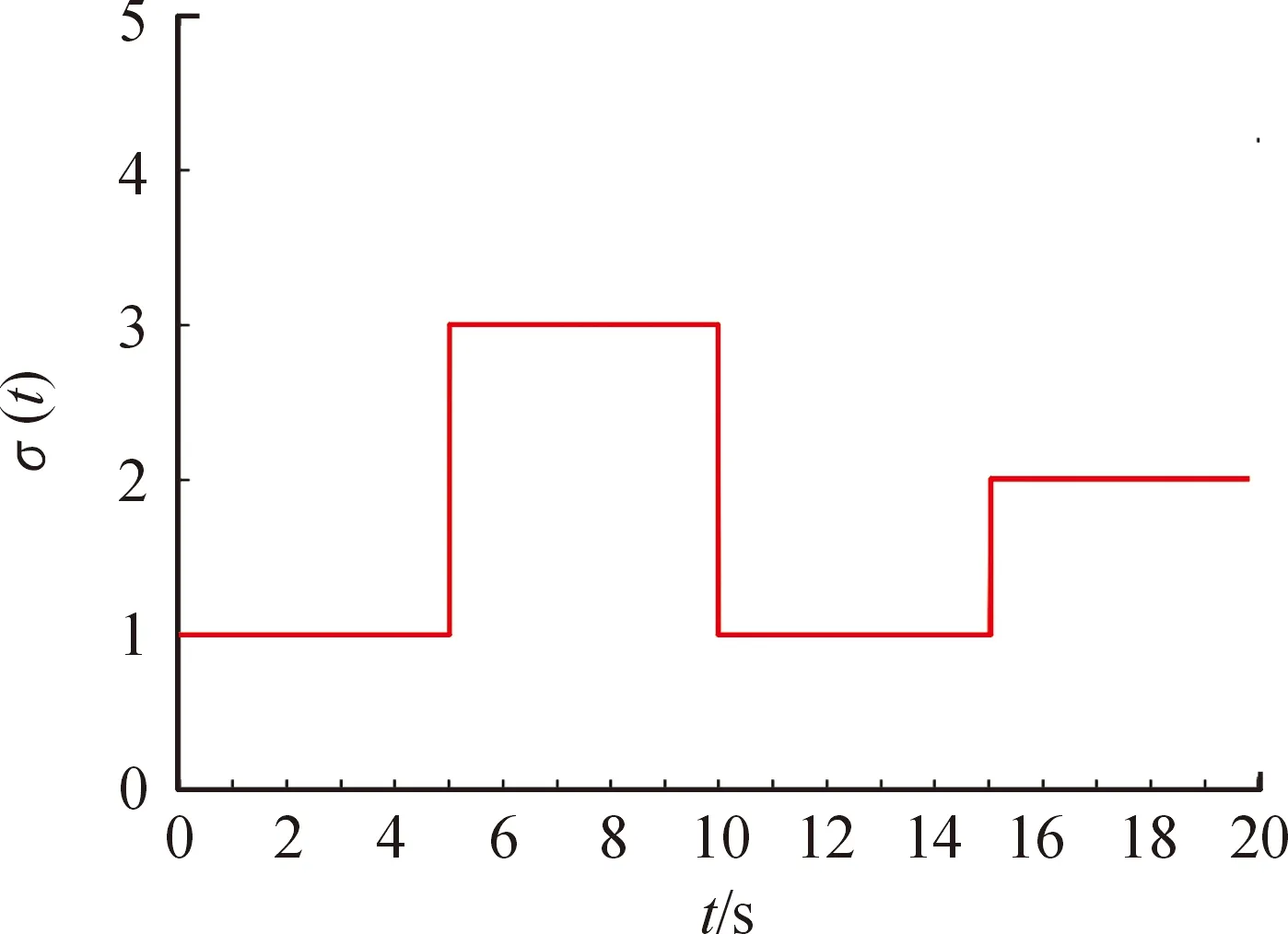
本文假设无人机之间采取双向通信方式,并将通信网络建模为随时间变化的连通无向图。令G={G1,G2,…,Gp},p≥1为无人机之间所有可能建立的通信拓扑图的集合,t0=0 σ(t):[0,+∞)→P={1,2,…,p}为通信拓扑切换信号,表示t时刻通信拓扑图Gσ(t)对应G中元素的下标,Gσ(t)对应的拉普拉斯矩阵为Lσ(t)。 接下来,给出如下关于无人机编队的定义。 式中,wij=wi-wj为无人机之间的相对状态信息,则称多无人机系统能够实现编队队形w。 在实际应用中,无人机在运动过程中,由于障碍物阻挡或者通信距离有限等因素的影响,导致无人机部分个体仅能够联系到邻居无人机,无法获取全局信息。因此,有必要构建基于局部相对信息的分布式编队控制器。 本文利用局部邻居无人机相对状态信息设计分布式编队控制器如下: i=1,2,…,N (2) 式中:aijσ(t)为当前时刻通信拓扑图Gσ(t)的邻接矩阵Aσ(t)的元素,K∈Rp×n为待设计的反馈增益矩阵。 由式(1)和式(2)可以得到闭环系统方程为 (3) 为了便于分析,这里介绍文献[26]中的结论。 令E=[-1N-1,IN-1],F=[0N-1,IN-1],则如下的引理成立。 2)L=LFE; 3) 如果拓扑图是连通的,其矩阵R的特征值均具有正实部,其中R=ELF。 (4) 由上可以看出,是一个具有较低维数的切换系统。由编队误差向量δ(t)的定义可知,通过变量替换,多无人机系统的在切换通信拓扑条件下的编队控制问题已经转换为低维切换系统的渐近稳定性问题。 为了实现多无人机系统在切换通信拓扑下编队控制,需要在前文分析结果的基础上,寻找恰当的共同李雅普诺夫函数使得线性切换系统渐近稳定。 在给出最终结论之前,首先介绍如下的结论。 引理3:假设通信拓扑图为连通的无向图G={G1,G2,…,Gp},p≥1,Lσ(t)为对应于图Gσ(t)的拉普拉斯矩阵,则存在一个共同的正定对称矩阵Q使得如下的条件成立: QELσ(t)F+(ELσ(t)F)TQ>2α0IN-1 (5) 因此 即 证明完毕。 注1:在引理3中,通过研究拓扑图拉普拉斯矩阵的性质,成功寻找到一个共同正定矩阵Q使得式成立。这一性质为后文使用该条件,为切换系统构建共同李雅普诺夫函数,进而分析其渐近稳定性创造了条件。 定理1如果系统矩阵和编队队形满足条件A(w1-wj)=0,j=2,3,…,N,且存在参一个正定对称矩阵P使得如下的不等式成立: (6) 证:构建如下的李雅普诺夫函数 自主阅读是阅读教学方法之一,在我国目前的初中英语阅读教学过程中,很多教师仍然将细节化指导作为教学重点,造成了学生过多依赖教师的情况,其自主学习能力得不到提升,阅读过程中的问题也很难显现出来。阅读学习注重学生对于具体内容的理解,在让学生了解基本阅读重点的同时,教师应该给予学生更多的自主权。在教学具体阅读内容时,教师可以仅将阅读重点作简要讲解,让学生根据自己的学习经验完成细节化阅读。此时,学生会根据阅读文本的具体内容和自己的学习经验完成自主阅读,而在教师的具体讲解过程中,学生可以结合自己遗漏的重点内容,提升自身的自主学习能力。 V=δT(Q⊗P)δ (7) 令K=BTP,则 δT(Q⊗P)(IN-1⊗A-ELσ(t)F⊗BK)δ= δT(Q⊗(ATP+PA)- ((ELσ(t)F)TQ+QELσ(t)F)⊗PBBTP)δ= δT(Q⊗(ATP+PA))δ- δT(((ELσ(t)F)TQ+QELσ(t)F)⊗PBBTP)δ< δT(Q⊗(ATP+PA))δ-δT(2α0IN-1⊗PBBTP)δ 因为矩阵不等式成立,由此可得 注2:在定理1中,利用引理2的结论,构建了降维切换系统的共同李雅普诺夫函数,从而使得系统可以在Lσ(t)任意切换的情况下渐近稳定。这等价于系统可以在拓扑图任意速度切换的情况下,实现无人机的编队。 1) 系统模型。本文设置由5架无人机组成多无人机系统,单架无人机为二阶积分模型。设第i架无人机的系统矩阵如下: 其中:xi、vix分别为无人机i在x方向的位置和速度;yi、viy分别为无人机i在y方向的位置和速度。 各无人机的初始位置设置为在[0,10]之间取随机数,初始速度在[0,1]之间取随机数。 2) 编队队形。设置无人机之间的编队队形为 由无人机的编队队形向量可知,无人机之间的期望实现的编队队形如下(图1): 图1 无人机编队队形示意图 3) 通信拓扑结构。设置无人机之间的通信拓扑结构在如下的3个拓扑图之间切换(图2): 图2 无人机之间的通信拓扑示意图 设置切换信号如图3所示,则通信拓扑图之间的切换顺序为G1→G3→G1→G2。 图3 通信拓扑图的切换信号曲线 根据拓扑图的拉普拉斯矩阵计算得到系数α0=min{α1,α2,…,αp},取α0=0.138 2。根据线性矩阵不等式(7)解得到矩阵P为 根据定理1可设计反馈矩阵为 根据如上的反馈矩阵和参数设定仿真结果如图4—图7所示。图4为无人机的x和y方向的编队位置误差向量δ(t)随时间变化曲线。由图中可以看出,随时间变化,编队位置误差向量随时间逐渐收敛到0,这说明无人机之间的相对位置收敛到期望的固定值。 图4 编队误差变量随时间变化曲线 图5和图6分别为各无人机的位置和速度随时间变化曲线。由图中可以看出,无人机之间的位置保持了固定的相对距离,并且在2个方向上无人机的速度分别趋于相同。 图5 无人机x、y方向位置分量随时间的变化曲线 图6 无人机x、y方向速度分量随时间的变化曲线 图7为无人机编队在x-y平面运动轨迹。图7中无人机轨迹之间的红色实线连线,表示当前时刻无人机之间的编队队形,由此可以看出,无人机之间能够形成并保持期望的编队队形(如图1所示),从而验证了理论分析的正确性。 图7 无人机编队队形形成过程曲线 本文研究了切换通信拓扑条件下多无人机系统的编队控制问题,构建了分布式的编队控制律。利用共同李雅普诺夫函数方法推导得到了无人机实现编队的充分性条件。在本文中,无人机之间的信息交换是连续的,而在实际应用中,为了减少能量消耗,通常采取间断通信方式交换信息。因此,下一步将研究基于事件驱动的控制策略的无 人机编队控制问题。
3.1 分布式编队控制器构建

3.2 编队问题转换为稳定性问题



4 具有时变通信拓扑的多无人机系统协同编队控制













5 数值仿真
5.1 参数设置


5.2 仿真结果






6 结论
