PLC技术在农业机械电气控制装置中的应用
2022-12-14陈香林
陈香林
(内蒙古敖汉旗农牧局,内蒙古 赤峰 024300)
1 PLC技术概述
PLC属于一种可编程的逻辑控制器,PLC内部具有很多的控制指令,如运算控制指令、计数控制指令、定时控制指令以及逻辑运算控制指令等。在具体应用中,借助于模拟或数字形式的输入、输出,PLC便可对机械设备进行自动化运行控制。目前,PLC的基本组成结构包括输入单元、输出单元、储存器以及中央处理单元等,且不同机型的PLC所包含的外部设备也不同,借助于这些设备,PLC具备了良好的网络通信、检测和辅助翻译等附加功能[1]。在PLC的具体应用中,其主要工作过程是通过PLC程序对外部输入点中的输入值进行逻辑运算,再通过输出控制程序对其进行信号变化处理,然后以此为依据,对外部需要控制的量加以控制,从而达到自动化的机械控制效果[2]。在此过程中,对于进入到PLC中的输入信号,储存器会通过事先设定好的运行控制程序来进行相应处理,然后将其以控制程序的方式输出。对于输出的控制程序,在经过PLC处理之后,可直接通过外接数据进行控制的机械控制装置传输,以此来达到精准的机械控制效果。PLC自动化控制系统的主要应用原理示意图,如图1所示。

图1 PLC自动化控制系统的主要应用原理示意图
2 PLC在农业拖拉机自适应平衡控制装置中的应用
农业拖拉机作业时,因为工作环境比较复杂,行驶地面高低不平,所以其车身很容易出现颠簸和倾斜情况,从而改变其作业路线,影响其作业效果。为有效避免此类问题,做好农业拖拉机自平衡控制装置设计非常关键。在此过程中,设计者与技术人员便可对PLC技术加以合理应用。
1)装置的硬件设计。具体设计中,主要通过传感器进行检测,通过PLC进行控制,通过电液比例控制阀进行驱动,并为液压缸的响应提供支持。将位移传感器和倾角传感器用作其主要的检测装置,这两种传感器输出的都是模拟量信号;将四个液压缸和一个电液比例换向阀用作其主要的执行元件,其中电液比例换向阀仅能够对模拟信号进行接收。如果系统在实际运行中发生故障,系统会立即停止工作,故障报警器也会立即发出响声报警;如果液压缸到达了极限位置,但依然没有达到伸缩目标量,此时的示警器也会发出响声报警,提示系统工作需要停止[3]。在电气控制装置中,PLC是其核心部分。为适应装置硬件系统的实际设计与应用需求,设计中特选择了三菱FX2N-32MR-D PLC,其I/O端子共32个,包括输入端子16个和输出端子16个。因为位移传感器以及倾角传感器所输出的都是模拟信号,不能直接被PLC接收,所以需要进行模拟量输入扩展单元设置。基于此,在电气控制装置中添加了两个模拟量输入扩展单元,一是FX2N-4AD,二是FX2N-2AD。同时,因为PLC中输出的是数字信号,此类信号不能被电液比例换向阀接收,所以在该装置设计中,也设置了一个模拟量输出扩展单元FX2N-2AD。PLC的输入信号包括面板操作、传感器采集信号以及触摸屏参数设定,输出信号包括电液比例换向阀控制、触摸屏上的传感器采集信号实时显示以及系统运行状态和故障报警的实时显示[4]。
2)装置的软件设计。在农业拖拉机自适应平衡控制装置中,其软件系统包括主控制模块以及信号采集模块。其中,主控制模块的功能是控制拖拉机车身平衡,信号采集模块的功能是对位移传感器以及倾斜传感器中的信号进行采集。在该系统中,主程序是通过倾角传感器对拖拉机机身的倾斜角进行检测,并将检测到的倾角传递到信号采集模块,最终传递给PLC,PLC中的比较单元会对检测到的倾斜角信号值和系统中设定好的倾斜角极限值进行比较,如果检测值比极限值小,则不会对其进行调节;如果检测值比极限值大,PLC便会将相应的控制指令发送给支撑缸,通过支撑缸的伸缩控制来实现拖拉机机身的自适应调节。基于PLC技术的农业拖拉机自适应平衡控制装置软件主程序控制流程图如图2所示。通过这样的方式,可让PLC技术在农业拖拉机自适应平衡控制装置中达到良好的应用效果,从而实现农业拖拉机的自适应平衡控制,有效防止机身颠簸、倾斜等情况对其作业质量的不良影响。
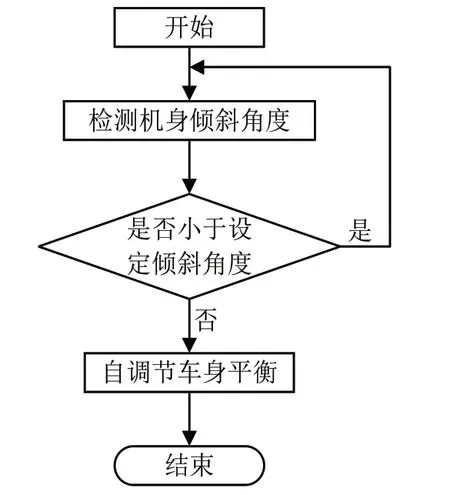
图2 基于PLC技术的农业拖拉机自适应平衡控制装置软件主程序控制流程图
3 PLC在农业播种机电气自动化控制装置中的应用
农业播种机电气自动化控制装置设计融入PLC技术,可保障出水量可控,确保设备速度与出水量成正比[5]。以一种精准施水型玉米播种机的机电自动化控制装置设计为例,PLC技术的具体应用如下。
1)控制方案设计。在玉米播种机的机电自动化控制装置中,核心控制模块是PLC,在此基础上,根据装置的实际应用需求,进行了测速模块、施水执行模块、水位监测模块、报警模块等模块的设计。在其机械设备控制系统中,主要包括主程序和施水执行程序。为确保有效运行,可通过主机单独进行施水执行程序控制。具体应用中,PLC中的测速模块会对施水播种机的运转速度进行检测,然后将检测到的数据上传到主机,主机会根据实际的运转情况对施水模块进行合理调整,以此来确保出水量的灵活性和可控性,使播种机的运行速度和出水量之间成正比,并达到良好的作业调速与抗抖动的效果[6]。
2)PLC自动化控制设计。在玉米播种机的机电自动化控制装置中,PLC的主要组成部分包括输入单元、输出单元、储存器、中央处理单元和电源。主要工作过程包括输入采样、程序执行、输出刷新三个环节。具体设计中,以实际的玉米播种需求作为依据,通过扫描功能将处在输入状态的数据依次扫描储存到I/O映像区域。在完成了采样输入之后,PLC便会自动转入到程序执行和输出刷新环节中。此时,即使是输入状态和数据出现了变化,也不会影响到相应单元中的状态和数据[7]。程序执行中,PLC会按照由上到下、由左到右的顺序对施水玉米播种机中的控制程序依次进行扫描,以具体的逻辑运算结果作为依据,对储存区域内的逻辑线圈位置状态进行控制,并实现I/O映像区域线圈输出状态的刷新,同时也可以对控制系统中速度控制、施水量调节等功能指令的执行进行科学决定。在完成了程序执行之后,PLC便会自动进入到刷新环节中,在此过程中,I/O映像区域会将CPU下达的指令作为依据,对锁存电路进行刷新,之后再对相应的外部设施进行驱动,从而实现精准施水玉米播种机的信息化和自动化控制。
3)显示模块设计。玉米播种机的机电自动化控制装置中主要的显示模块包括以下几个。一是测速模块,机械设备运行中,显示模块会将采集到的数据信息上传给PLC,经PLC处理之后,脉冲信号会在单位时间内转变成机械的运转速度,再通过LED单元将其显示出来[8]。但是,由于机械地轮在秸秆密集区域碾压时很容易产生打滑现象,从而影响到数据的采集精度,为防止此类情况发生,具体设计中可以将地轮和编码器之间进行同轴连接,通过同轴联动的方式来实现机械运行数据的准确采集。二是数码管模块,该装置的数码管采用的是7段和8段两种形式,并按照阳极型和阴极型进行划分,将8个LED设备阳极相关联,对于某个阴极中的低电平输出,与其对应阳极位置的LED便会被点亮,通过不同低电平输入的合理组合,可让机械的实际运转需求得到良好满足。三是施水控制模块,该模块在精准施水玉米播种机控制装置中属于最主要的一个执行模块,其组成部分有两个,即出水管路、大扭矩舵机,设计中为实现成本的合理节约,特选择了直流舵机,并未进行逆变器配置。将水箱设置在该装置后位,以此来实现水速测试,并对其出水速度进行合理控制[9]。表1为精准施水型玉米播种机在某次实际应用中的施水控制参数。四是监测模块,将液位传感器安装在该装置内部,当水位比规定参数低时,传感器便会将相应的信号及时传递到PLC中,并在LED显示屏上显示出实际的水位高程,同时,相应的报警系统也会启动,警示灯开始闪烁,蜂鸣报警音也会响起,以此来提示工作人员及时给机械加水。五是故障预警模块,将相应的运行参数采集传感器设置在机械主要部件上,实时采集其运行参数,并传输给PLC,一旦发现有部件出现故障,装置会立即发出预警。通过这样的方式,便可让PLC技术在农业播种机中充分发挥出其作用与优势,以此来实现农业播种机的信息化和自动化控制。
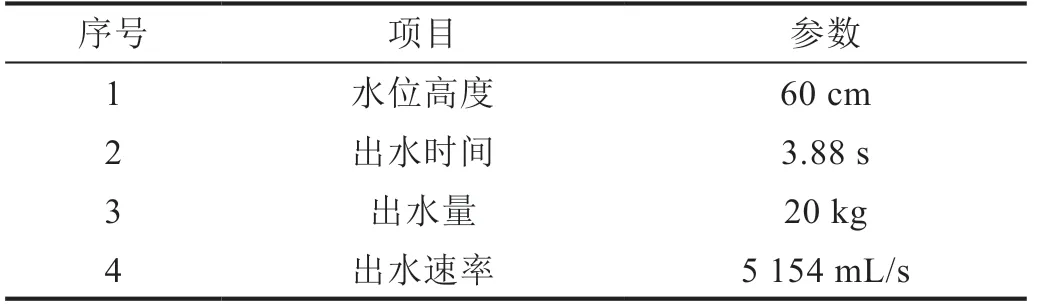
表1 精准施水型玉米播种机在某次实际应用中的施水控制参数
4 PLC在农业收获机电气自动化控制装置中的应用
在农业收获机的电气自动化控制装置中,PLC技术也具有非常显著的应用效果。以某农业番茄收获机中的电气自动化转速控制装置的设计为例,PLC技术的具体应用如下。
1)硬件系统设计。在转速控制装置中,其硬件系统的主要组成部分包括PLC、旋转编码器、触摸屏和模拟量输出模块等。表2是某农业番茄收获机电气自动化转速控制装置主要硬件选择情况。
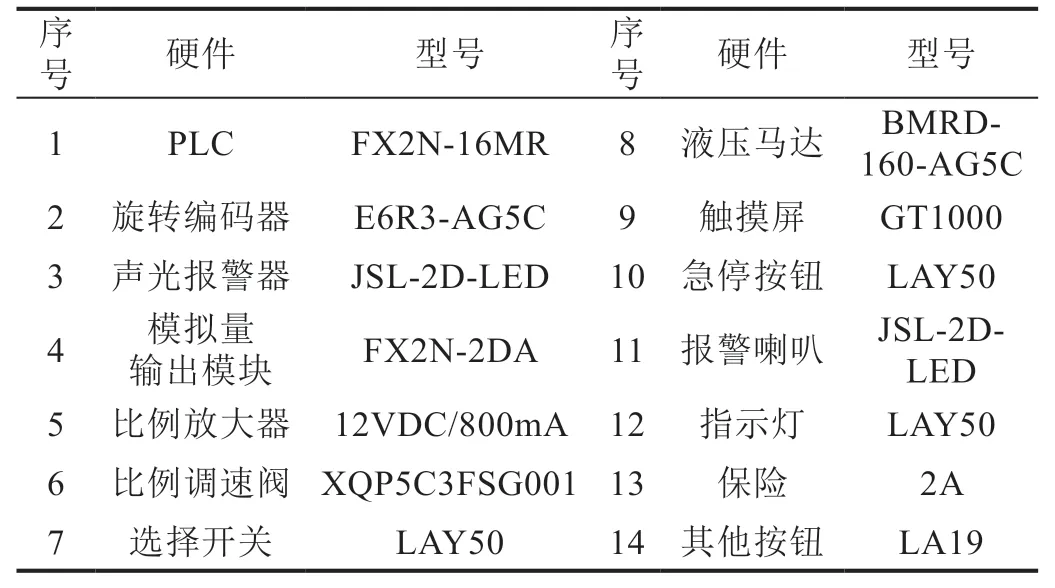
表2 农业番茄收获机电气自动化转速控制装置主要硬件选择情况
2)软件系统设计。将PLC高速输入端口和旋转编码器连接,以此来实现马达旋转速度的实时监测。通过触摸屏,可对转速进行临界值设置,当转速比临界值大或比临界值小时,PLC都会将相应的转速调节指令自动发送给PID(线性控制器),借助于PID,可实现马达转速的闭环调节。通过这样的方式,可让农业番茄收获机的转速得以自动控制,从而实现PLC技术应用优势的充分发挥[10]。
5 结束语
综上所述,在农业机械电气控制装置中,PLC技术具有非常显著的自动化控制效果。因此,相关企业、科研工作者在进行农业机械电气控制装置的设计和开发时,应加强PLC技术的应用研究,并结合农业机械电气控制装置的实际需求,加强对PLC技术的合理应用,以充分满足农业机械电气控制装置的实际应用需求,促进农业机械化发展,助力乡村振兴。