基于改进Canny算子的电铲自动装载目标边缘检测方法★
2022-12-08史智杰乔建强
史智杰,乔建强
(太原重工股份有限公司 矿山采掘装备及智能制造国家重点实验室,山西 太原 030024)
引言
电铲被广泛应用于露天矿的采掘和地表剥离,在整个采矿系统中起着非常重要的作用[1-2]。但随着施工精度、效率、能耗等方面要求的不断提高以及工作环境带来的严峻挑战,传统电铲已不能满足今后的工程需求。为了解决传统电铲作业面临的问题,利用先进的人工智能技术、机器人技术、数字化技术、远程监控技术与高性能计算技术等,对传统电铲进行升级改造,研发可以实现智能自主作业的智能挖掘机器人,无论是从经济效益还是社会效益的角度来看,均具有重要的现实意义[3-5]。自动装载是电铲实现智能自主作业的重要任务,而对矿卡等重要装载目标边缘的准确、自动识别是实现智能电铲自动装载作业的关键。只有对矿卡边缘进行准确有效的识别检测,才能保证电铲自动装载过程能够安全可靠、高效地进行。
在当前存在的边缘检测算法中,Canny算子[6]由于其简单易用的特性,在许多实际工程领域得到广泛应用,并且它经常被作为标准算法来评价其他边缘检测算法的性能。传统的边缘检测算子主要步骤:通过采用高斯滤波来平滑图像,抑制噪声;计算梯度幅值和梯度方向,生成梯度图;采用非极大值抑制方法来细化边缘,使边缘定位更加准确;采用滞后连接方法对梯度图进行阈值化处理得到二值化边缘图。但是,梯度图只是利用了相邻像素之间的强度变化,对图像信息的利用不充分,这会导致在边缘检测过程中无法有效地区分弱边缘和噪点,会造成弱边缘丢失的情况。另外,传统Canny算子滞后连接过程中的双阈值需要人为设定,严重影响边缘检测的自适应能力。
为了解决梯度图引起的弱边缘丢失问题,近年来有许多研究人员进行了相关研究,并取得了一定的成果。针对梯度图信息利用率不高的问题,Molina等[7]基于模糊集理论将梯度图转化为隶属度图,提高了对图像信息的利用率,有效增强了对弱边缘的检测能力,但是该算法过于复杂,而且引入了更多需要人为设置的参数,不利于实际工程应用。Sun等[8]基于万有引力定律将像素强度类比于重力场中的质量,从而构造新的特征图,该特征图有效提高了抗噪能力,但是同样引入了过多参数需要人为设置,降低了算法的自适应性。为了解决滞后连接自适应问题,Medina等[9]提出了一种准则用于提供滞后阈值的候选初始值,通过缩小取值范围来提高滞后连接的自适应性。另外,Medina等[10]还提出一种方法,将滞后连接双阈值问题转化为单阈值问题,然后自适应地选取阈值。Han等[11]基于Otsu[12]提出一种自适应获取双阈值的方法,有效提高了边缘检测自适应性。
本文构造了一种新的边缘隶属度图来代替梯度图,综合利用了梯度、局部梯度差和梯度方差等多种图像信息,有效提高了对弱边缘的检测准确率。并基于Otsu提出一种新的自适应获取双阈值的方法,有效提高了边缘检测的自适应性。经过实验检测,本文提出的基于边缘隶属度的边缘检测算法相对于其它边缘检测算子而言,准确率更高,能够有效满足智能电铲自动装载作业需求。
1 基于边缘隶属度的边缘检测算法
新提出的基于边缘隶属度的边缘检测算法主要包括四个步骤:
1)滤波降噪:采用高斯滤波对输入图像进行滤波降噪,减少噪声对边缘检测的影响。
2)计算边缘隶属度图:采用Sobel算子计算梯度图,综合利用像素梯度、局部邻域梯度差和局部梯度方差等图像信息计算边缘隶属度函数,生成边缘隶属度图。
3)非极大值抑制:采用非极大值抑制方法,沿着梯度方向进行细化边缘,提高像素的定位准确率。
4)自适应滞后连接:采用Otsu法自适应的确定滞后连接高阈值和低阈值,对经过非极大值抑制后的边缘隶属度图进行阈值化处理,生成最终的二值化边缘图。
1.1 滤波降噪
首先对输入图像I进行高斯滤波降噪,以减少噪点对边缘检测的影响。采用的二维高斯函数为:

假定D为滤波后的图像,高斯滤波计算如下:

1.2 计算边缘隶属度图
作为经典的一阶微分算子,Sobel算子计算简单、效果好,被许多边缘检测方法所采用。在此,采用Sobel算子来计算梯度图。本文采用一组3×3的卷积掩模分别来计算x方向和y方向的梯度:

式中:Sx为x方向的卷积掩模,Sy为y方向卷积掩模。对于经过高斯滤波的图像D,x方向的梯度Gx和y方向的梯度Gy分别为:

梯度幅值G为:

梯度方向θ为:

为了更好地区分弱边缘和噪点,提高边缘检测的准确性,综合利用梯度、局部梯度差和局部梯度标准差提出一种新的边缘隶属度图。边缘隶属度图M为:

式中:γ=2n-1,n为图像的位数,对于一般的8位图像,γ取值为255;Tij(m,n)表示像素G(i,j)局部邻域内的梯度差信息,设Gmax和Gmin分别为梯度图中梯度幅值的最大值和最小值,则Tij(m,n)计算如下:

假定σ(i,j)为梯度图中像素G(i,j)局部邻域内的方差信息,局部邻域均值为M(i,j),均值和方差计算如下:

1.3 非极大值抑制
采用非极大值抑制对边缘隶属度图M中的边缘进行细化处理,提高边缘的定位精度。该方法在边缘隶属度图上进行遍历,对于每一个候选边缘像素M(i,j),沿着梯度方向比较其边缘隶属度值与以该像素为中心的相邻像素的大小。若该像素的边缘隶属度值大于相邻像素的边缘隶属度值,则其为局部极大值点,认为该像素为边缘像素,并保留其边缘隶属度值。若该像素的边缘隶属度值小于任意相邻像素的边缘隶属度值,则其不是局部极大值点,认为该像素为非边缘点,将其边缘隶属度值置为0。通过非极大值抑制,实现对边缘的细化处理,得到候选边缘图C。
1.4 自适应滞后连接
滞后连接通过设定高阈值Th和低阈值Tl将图像分割为真实边缘、非边缘和存疑边缘三部分。在候选边缘图C上,边缘隶属度值>高阈值的为真实边缘点,<低阈值的为非边缘点,位于高阈值和低阈值之间的为存疑边缘点。为了提高边缘连续性,需要对于存疑边缘点进一步进行判断。如果在存疑边缘点的局部邻域内存在边缘点,则认为该点为边缘点,如果在局部邻域内不存在边缘点,则认为该点不是边缘点。
传统的Canny算子通过人工选取高阈值和低阈值,自适应能力差,边缘检测结果容易受到人为因素干扰,不利于边缘检测算法的实际应用。对此,本文基于Otsu提出一种自适应滞后连接方法,如下页图1所示。该方法主要包括四个步骤:

图1 自适应滞后连接流程图
1)采用Otsu方法处理候选边缘图C,计算高阈值Th:

2)采用计算得到的高阈值Th对候选边缘图C进行阈值化处理,得到剩余边缘图R,像素R(i,j)的值计算如下:

3)采用Otsu方法处理剩余边缘图R,计算低阈值Tl:

4)采用计算得到的高阈值Th和低阈值Tl对候选边缘图C进行滞后连接处理,得到最终的边缘图。
2 实验验证与分析
为了验证改进边缘检测算法的性能,本文选取电铲装载作业过程中常用的两款矿卡,以及电铲实际装载作业图像作为验证图进行边缘检测试验。为了更好地进行对比验证,本文选用Canny算子和Han算子作为对照方法。本试验在Visual Studio 2013平台下进行验证,硬件平台为Intel core i7-8700,16G运行内存的计算机。
两款常用矿卡的边缘检测结果如图2所示。对于第一款矿卡,从虚线框里可以看到,由于部分矿卡边缘和背景非常接近,存在明显的弱边缘,Canny的检测结果存在边缘缺失的问题,而Han和本文提出的改进算法都能够有效的检测出矿卡边缘。对于第二款矿卡,车斗上边缘和背景非常接近,属于明显的弱边缘,Canny和Han均无法有效的检测出车斗的上边缘,而本文提出的改进算法能够检测出所有边缘。这对于自动装载过程中,自动识别矿卡车斗的位置,防止铲斗与矿卡发生碰撞事故,是非常关键的。
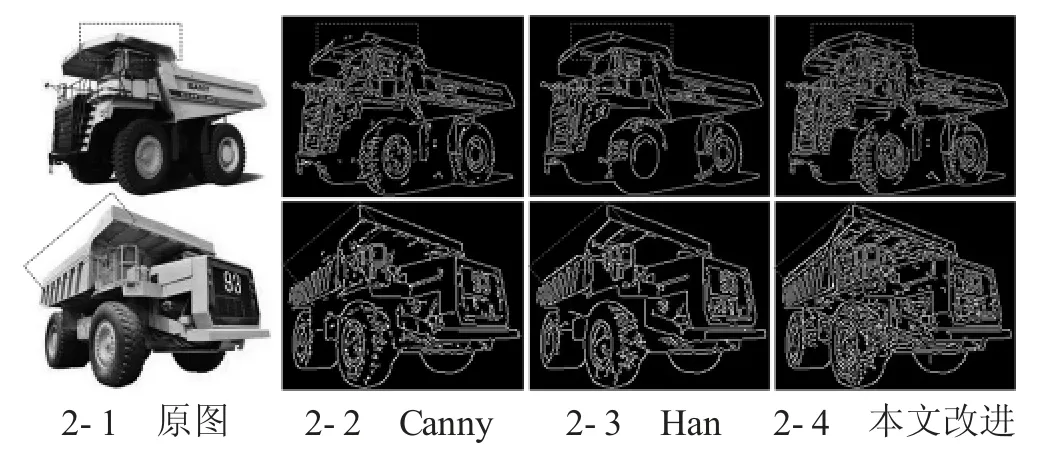
图2 矿卡边缘检测图
电铲实际装载作业目标边缘检测结果如图3所示。从虚线框内可以看出,对于矿卡车斗的上边缘,Canny存在边缘丢失问题,而Han和本文提出的改进算法可以较为清晰完整的检车出车斗边缘。对于矿卡上的车辆识别号和电铲上的栏杆,Canny和Han均无法有效的检测出有效边缘,存在边缘丢失问题,而本文提出的改进算法可以对车辆识别号和电铲栏杆进行有效的边缘检测。

图3 电铲装载作业目标边缘检测图
通过上述两组实验对比可以证明,改进后的边缘检测算法对弱边缘的检测能力更强,能够有效提高边缘检测的连续性和完整性,这对电铲自动装载作业具有非常重要的作用。
3 结论
本文针对电铲自动装载作业目标边缘检测需求,以及Canny算子存在的弱边缘检测能力不足,自适应能力不高等问题,提出一种改进边缘检测算子用于电铲自动装载作业目标边缘检测。本文提出的改进方法综合利用像素梯度、局部邻域梯度差、局部梯度方差等图像信息生成边缘隶属度图来代替传统的梯度图,有效提高了图像信息利用率和弱边缘检测能力,并且提出一种自适应滞后连接方法,根据Otsu自动选取高低阈值,有效提高了边缘检测的自适应性和实际应用能力。实验证明,本文提出的改进算法边缘检测效果更好,能够有效满足电铲自动装载作业目标的边缘检测需求。
