“人-机-环境”系统下智能花椒采摘机设计研究
2022-12-07史志远靳雨欣郑杨硕冉秋艺
史志远 靳雨欣 郑杨硕 冉秋艺
摘要:为解决现有花椒采摘机在适应性上存在缺陷、椒农接受度低的问题。基于“人-机-环境”系统理论,根据现有农机技术构建智能采摘机功能模型,并分析影响采摘机设计的“人”与“环境”因素,针对性地进行设计创新。通过分析结果准确设计采摘机的采摘方式、尺寸造型、交互方式、运输动力系统,使采摘自动化程度、效率品质、易用性、贴合环境程度有明显提升,满足椒农使用需求。该设计方法也为提升农机装备研发应用水平,进而全面推动乡村振兴提供借鉴与启示。
关键词:“人-机-环境”系统理论 花椒 智能农机 采摘机设计 乡村振兴
中图分类号:TB472 文献标识码:A文章编号:1003-0069(2022)11-0150-04
Abstract:In order to solve the problems that the existing Zanthoxylum bungeanum Maxim pickers have defects in adaptability and low acceptance of farmers. Based on the "man-machine-environment" system theory. According to the existing agricultural machinery technology,the intelligent picking machine function model is constructed,and the "man" and "environmental" factors that affect the design of the picking machine are analyzed,and the design innovation is carried out in a targeted manner. Accurately design the picking method,size and shape,interaction method,and transportation power system of the picking machine according to the analysis results. so that the degree of picking automation,efficiency,quality,ease of use,and fit for the environment have been significantly,improved to meet the needs of farmers. This design method also provides reference and inspiration for improving the level of research and development and application of agricultural machinery and equipment,and then comprehensively promoting rural revitalization.
Keywords:“Man-Machine-Environment” system theory Zanthoxylum bungeanum Maxim Intelligent agricultural Machinery design of picking machine Rural vitalization
引言
花椒是集油料、香料、藥用于一体的经济植物,有“五宝树”之称[1]。随着火锅及众多川菜品牌的流行,花椒作为主要调料,其市场需求与种植产业不断增大。目前花椒基本靠手工采摘,该采摘方式的众多弊端成为制约花椒种植产业的主要瓶颈。得益于农业机械研究的发展,市面上也出现各类手持采摘机、智能采摘设备,但由于忽视“人-机-环境”的关系,采摘机在适应性上存在缺陷,导致椒农对采摘机的接受度普遍不高。在相关学者对花椒采摘机的研究中,李凯欣[2]、刘蒙蒙[3]对花椒采摘及控制系统、采摘机器人及关键技术进行设计,张永梅[4]、杨萍[5]分析花椒果实的自动识别技术与可行性,使其能够精准识别、定位花椒果实的母枝并准确计算出采摘点。以上学者研究的重点主要集中在采摘机技术实现上,但缺乏使用者、环境等限定性因素的考虑。本文以“中国花椒之乡”汉源县汉源花椒为例,基于现有花椒采摘智能识别、农机自走系统等技术,以“人-机-环境”系统理论为指导,从“人”“机”“环境”三个维度进行分析并设计,使花椒采摘更加智能化、易接受化,进而提高花椒采收效率。
一、设计背景
汉源花椒,古称黎椒,在汉源县已有2100多年的栽培历史,因其果色红润,粒大油重、香气浓郁、麻味醇厚,深受消费者喜爱,位居全国花椒销售之冠。汉源县位于四川西南部,其日照、湿度、温度、土壤、海拔均适宜花椒生长。汉源花椒产量极大,数字花椒基地已达到5万亩,以2021年汉源花椒统计量为例,其预计产量已达到4000万余公斤,预计产值高达9.8亿元,品牌价值高达49.65亿元。
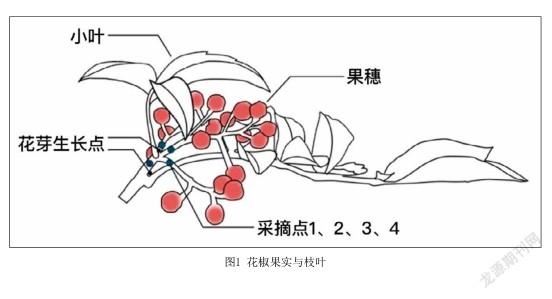
花椒种植属于劳动密集型产业,目前汉源花椒产业采摘机械化水平较低,且汉源花椒的特性决定了其手工采摘难度大、效率低:(1)花椒树身布满皮刺,叶片边缘亦有细小锯齿,椒农采摘时极易被刮伤。(2)花椒果穗为一簇,紧挨着小叶与花芽,如图1所示的4个部位均可以作为采摘点。花椒采摘需尽量保证花椒穗的完整性,不能连枝带果地掐摘,以免将花芽一并摘下,影响来年结果。在掐摘过程中指肚易被叶片边缘的锯齿及叶柄小刺扎破,指甲缝也易产生刺痛感。(3)花椒果表皮有凸起油腺点,碰破油腺会导致花椒晒干后颜色发黑,成色降低。(4)花椒对采摘时间要求十分严格,采摘期仅有40余天[6],且早摘香气不明显,晚摘果实开裂脱落,短时间内需要大量劳动力。当前农村青壮年较少,劳动力短缺,雇佣外地工人费用较高,采摘一公斤鲜花椒成本高达5-6块,人力采摘成本极高,导致经常出现增产不增收的情况。市面上常用的花椒采摘机尽管能够提高采摘效率,但其暴力式的采摘方式严重破坏花椒品质,也影响了花椒来年发芽结果,这也成为椒农不愿使用该类采摘机的主要原因。
综上所述,随着花椒产业的不断发展,椒农对花椒采摘机械化有着强烈需求,同时也对采摘机有更高的适应性要求。
二、“人-机-环境”系统理论模型
人类社会发展历史即是人、机、环境相互关联、相互制约、相互促进的历史。“人-机-环境”系统是基于以人为本的原则、在产品开发中更多地考虑人与环境的因素,更好地发挥人的能力、提高人的效率[7],实现安全、高效、经济等目标。“人-机-环境”系统是将三者视为一个整体系统,在研究单个子系统影响因素时探究三者之间的作用与反作用关系,使其形成内部子系统相互影响、关联的综合性系统。
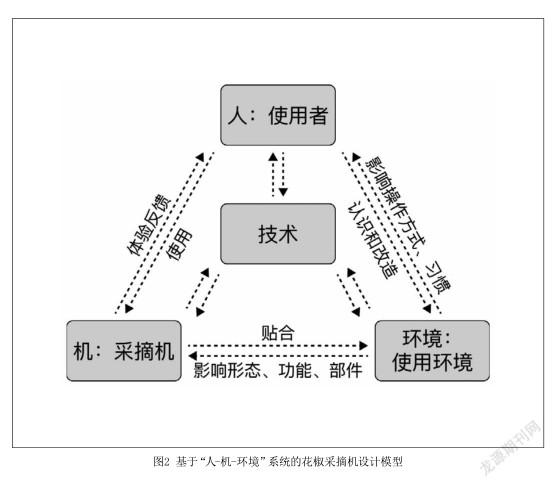
在花椒采摘机“人-机-环境”系统研究分析中,“人”是产品的使用者,即花椒采摘机的最直接接触者;“机”是人使用并控制的产品,本文指花椒采摘机;“环境”包括有形的自然环境、无形的社会环境和人文环境。花椒采摘机的使用环境是由自然环境、社会环境、人文环境中的一部分构成。花椒采摘机的工作过程可视作由人、采摘机、使用环境组合构成的完整系统,包含3个层次互动关系:(1)人与机,指用户的正向使用及反向获取体验反馈的双向互动;(2)机与环境,指采摘机的形态、功能、部件与其种植环境、采摘、运输环境的贴合;(3)人与环境,指用户与作业环境的相互作用,这一关系体现为用户对作业环境的认知及操作方式、习惯,如图2所示。
三、“人-机-环境”系统下花椒采摘机设计
在智能花椒采摘机设计阶段,首先根据现有智能农机研究技术,构建完整智能采摘机功能模型。并将采摘机放置于“人-机-环境”系统中,将其融入“人-机”“人-环”的分析中,综合“技术”条件的影响因素,对花椒采摘机的作业方式、技术原理、结构、尺寸、造型、材质、色彩等方面进行设计研究。
(一)“机”的概念与组成
智能花椒采摘机通过发动机驱动采摘系统对花椒进行采摘,实现花椒采摘功能。除此之外,智能采摘机若要实现集储存、运输为一体,仍需涵盖以下如花椒采摘机储存、采摘机行走等功能,涉及系统组件主要包括:自动识别系统、履带行走底盘系统、通讯与控制系统、动力系统、花椒集存系统等。
当前市面花椒采摘形式较多,有高枝剪切式、机械振动式、气吸、手持枪形式等。汉源椒农常用的是手持枪形电动采摘机,刀头多为梳齿型、双面M锯齿型、勾切型,但在采摘机的采摘系统选择时,需重点考虑采摘环境因素,减少因收割破坏花椒品质与影响花芽等实际问题。与此同时,花椒机的行走、储存功能也受限于环境因素。一般情况下,履带式行走系统是山坡环境下最佳选择之一,但履带尺寸、形式多样,如何设计适用于汉源花椒种植地的履带需要在环境因素中进行具体讨论。同样,采摘机储存功能也受限于种植环境的规模与作业时长影响,并进而影响到采摘机的尺寸与造型设计。
(二)“人”因素对花椒采摘机设计影响分析
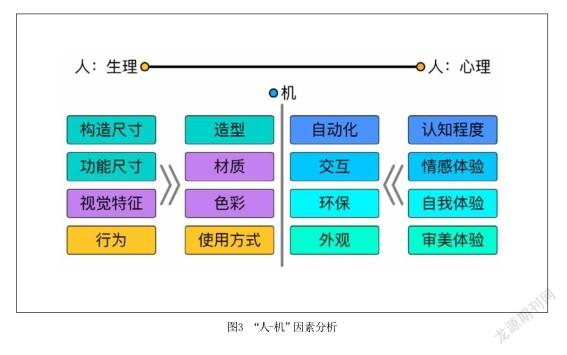
智能花椒采摘机设计应当符合使用者的生理和心理需求,使用者生理需求因素对采摘机的造型、材质、色彩、使用方式设计产生影响;心理需求因素影响采摘机的自动化程度、交互设计、环保特性、造型设计等方面(如图3)。
在当前汉源花椒产业中,劳动力资源短缺、椒农普遍年龄偏高已成为当前急需解决的问题,且椒农在接受度与认知水平方面也相对欠缺,这也对采摘机在易用性方面提出更高的要求。随着城市化发展速度加快,农村的年轻一代多数人缺少务农经验,很难再像祖辈一样从事“累苦”农活。未来人才回流农村形成农民职业化需要借助智能农械设备,让用户如使用电脑、手机般控制设备,进行农业工作。[8]因此,大规模采摘机械化已然成为花椒种植产业发展的必然趋势,同时椒农在采摘机的功能属性与交互体验方面需要更多的关注与优化。
在人机交互方面,椒农对采摘机的控制可通过交互屏幕完成,其中包含:(1)对行走系统与采摘系统的控制。(2)借助可视化地图选择采摘区域,实现多机器协同合作进行采摘。(3)使用面板關联移动终端,当集存箱满或发生故障时及时向椒农的移动终端发送提醒,以便椒农快速响应并处理,减少因机器故障带来的实际损失,提升椒农对采摘机的掌控感。
在造型设计方面,采摘机多以产品功能提示作用为主,旨在辅助采摘机功能更好地发挥,用户更易掌握使用方法。花椒采摘机机身材质由于环境复杂,采用不锈钢金属材料并喷涂防腐防锈油漆,使采摘机具有更耐腐蚀性与强度。在采摘机色彩选择上,结合使用环境的因素,机械臂与主体色彩选择视觉冲击较强的橙色,便于用户清晰观察采摘机所处位置。机械臂部分部件采用与橙色形成对比更加丰富的银灰色,部件分色喷涂并组装,使产品整体具备更强层次感与整体质感。
(三)“环境”因素对花椒采摘机设计影响分析
“人”“机”两者均处于“环境”因素中,“机”受“环境”因素影响较大,直接决定采摘机的正常运作以及采摘效率。“环境”因素对采摘机造型、材质、色彩、技术有着极大的影响(如图4)。通过对汉源地区花椒种植地调研,从有形与无形两个方面对“环境”因素进行分析。智能花椒采摘机主要受限于有形环境因素影响,即:采摘环境、运输环境、与种植环境,在下文中会进行详细的分析与设计。而无形环境中则是更多指导、赋能“机”的设计。花椒作为高附加值农产品,在不与粮食作物争土地的同时充分能够利用荒山并获得较高的经济回报,符合我国生态环境保护、农业综合开发、绿色产业等发展战略。2022年中央一号文件指出长期稳定支持丘陵山区小型机械、智能机械研发制造,并重点支持履带式作业[9]。同时农业机械发展进入第三代信息化技术体系,这个阶段农机创新体系的核心思维方式就是把农机转变为以信息技术为核心的高科技智能农业装备[8],政策的支持不断推动农业机械自动化程度、行走系统及控制系统的升级与发展。
1.种植环境分析与设计
汉源花椒属于红花椒类,由于红花椒种植特性,种植地一般选在背风、向阳山地坡上,以成片造林或林粮间种植。花椒树每株之间留有固定株距,便于苗木生长、椒农管理采摘,株距一般为3000mm×4000mm或2000mm×2000mm。汉源花椒种植间距多为2000mm×2000mm。
针对种植环境特点,对采摘机身尺寸及底盘进行设计。花椒采摘机机身尺寸(长×宽×高)设计为1200mm×800mm×700mm,机械臂伸直长度为1500mm,采摘高度范围为500mm-2200mm,采摘最大半径为3000mm。采摘机底盘采用倒梯形履带底盘,使采摘机能够适应更加复杂的地形,并具有通过性良好、转弯半径小、稳定性优良、爬坡能力强、可变速等优点。履带单侧外形尺寸(长×宽×高)设计为1200mm×150mm×280mm,履带轨距为550mm,转弯半径小于1500mm,在硬质与松软的路面环境下,底盘的跑偏率分别是3.45%和0.78%,可以通过25°的斜坡,稳定性和爬坡能力优良[10]。履带系统由履带、驱动轮、驱动电机、拖带轮、紧张装置、车架组成,实现加减速、直行、转弯等功能。履带底盘的行走速度设计为3个档位,从而满足行走、爬坡、采摘等作业要求,1、2档用于作业,3档用于行走。
行走系统采用以嵌入式PC处理器为核心,结合IOT技术和Linuxi嵌入式系统,搭载RFID、视觉传感器、VZ-XJGY-1300G双目相机以Eye-in-hand的方式水平放置于机身前端、GPS卫星导航系统,通过无线网、局域网、互联网等进行传输网络数据[11]。线路规划采用多级PID沿线控制、动态PID沿边控制和BFS算法以及基于有限状态机的目标点导航算法完成基于栅格法的全路径规划[12]。
2.采摘环境分析与设计
花椒树的顶端优势和枝条垂直优势较强。在花椒种植过程中,为方便椒农采摘,贴近地面的枝条与过长枝条将会被修剪到合适长度,两树之间通常留出一人能够通过的宽度。根据人机工程学[13]中百分位99的最大肩宽为486mm,计算为500mm,在减去500mm后花椒水平生长半径为1500mm。果穗生长垂直区间大致为500mm-2000mm,水平生长直径在3000mm内,枝条的生长情况影响采摘机末端执行器活动范围的设计。花椒果柄为0.5~0.9mm,且位于果实与小叶中间,采摘点范围有限,影响末端执行器的形态、大小、切断方式。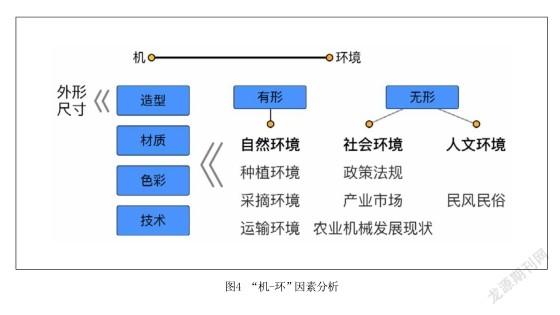
采摘系统由机械臂与末端执行器组成:(1)机械臂材料选择变壁厚的碳纤维增强环氧复合材料,使机械臂轻量化,与等壁厚的铝合金机械臂相比,重量降低了90.9%[14]。机械臂的控制算法使用模糊算法和RBFNN算法结合的方法,使机械臂能适应复杂的采摘环境[2]。(2)末端执行器由两个夹持装置和四个切断装置组成,在小臂滑轨上自由变换位置与角度,结合广角彩色摄像头以Eye-to-hand的方法分别放在夹持和切断装置上。摄像机识别花椒果穗母枝采用Otsu与K-means聚类算法,再结合图像相减法,在图像中得出采摘点坐标后,根据三维世界坐标与图像坐标的转换定位采摘点的三维世界坐标,从而控制末端执行器进行采摘,如图5所示[5]。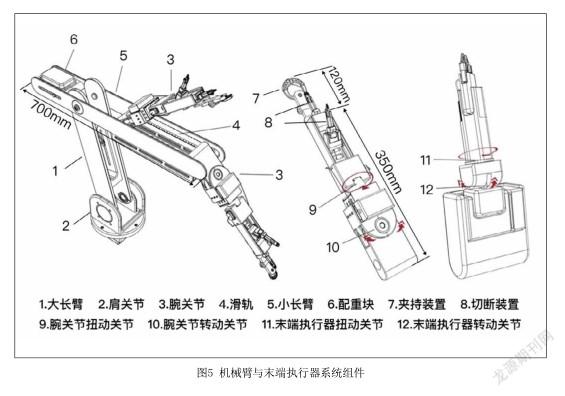
机械臂肩关节的尺寸(长×宽×高)为140mm×140mm×150mm,大长臂长500mm,小长臂长700mm,腕关节长350mm,夹持装置长120mm,切断装置长100mm,夹子尺寸(长×宽×高)为25mm×50mm×12mm,剪刀头尺寸(长×宽×高)为10mm×20mm×5mm。夹持装置顶端由两半圆夹组成,在采摘过程中将切断装置附近的树枝夹住,防止树枝晃动,方便切断装置采摘,夹持力设定为3N。切断装置的剪刀由刀头、橡胶垫组成,在采摘时橡胶垫起到防滑的作用,辅助刀头切段果穗母枝,切断力设定为5N。
两个腕关节可以在小长臂上350mm的轨道上自由滑动,末端执行器与腕关节都设有转动关节和扭动关节,可用来调整末端执行器的空间姿态。转动關节的步进电机选用藤尺公司的D2BLD75-12A-30S型号,扭动关节选用D0BLD40-12A-30S型电机[3]。腕关节转动带动夹持装置与切断装置倾斜、旋转,夹住枝条,进行采摘,花椒垂直掉落进下方的收集箱。
在采摘机工作时长需求方面,动力系统在大面积采摘环境中应具备较强的续航能力。动力系统使用柴油发动机,标定功率为17kW,转速为2200/rpm,动力底盘主要由履带底盘、配重块、液压系统、遥控控制系统、柴油机、变速箱、离合器等部件组成。动力通过V带从柴油发动机经过离合器传输变速箱输入轴,并传递给后动力输出轴和提升液压泵,提升和输出作业机具的动力,履带底盘的主要技术参数如表1所示[15]。
3.运输环境分析与设计
运输环境不仅包括采摘机自身的运输,而且也包括花椒的运输。在农村面包车的使用频率最高,可作为主要运输工具。以五菱荣光为例,后备箱进门宽度为1200mm,高度为1270mm,纵深为370mm-1580mm[16]。花椒摘下后应该集中堆放晾晒或放进烘房中烘干,在此过程中花椒果实不宜经过多次拿放,以免油腺破裂。采摘机机身的设计应该同时考虑运输与种植环境,在满足正常使用的情况下方便运输。
针对花椒运输环境,花椒收集箱采用抽屉式设计,尺寸(长×宽×高)为450mm×600mm×300mm,采摘机工作前用户需要将防雨罩抽出,机身与底座由回转机构连接可以360°旋转,使收集箱与采摘装置一直出于上下垂直状态,花椒果穗垂直掉落进收集箱内。在收集箱满后,用户可以直接取出收集箱进行倾倒清理,避免过多触碰果实。
(四)“人-机-环境”影响下智能花椒采摘机设计
将“技术”条件分别融入“人”与“环境”因素,作用于采摘机的设计,形成最终智能花椒采摘机设计方案。采摘机由自动识别系统、履带行走底盘系统、通讯与控制系统、末端执行器系统、动力系统、花椒集存系统等组成。新型行走系统和采摘系统设计,能够减少操作者的劳动强度;整机操控可通过智能屏幕完成,并且支持智能屏幕或移动终端选择作业区域、接收提示,更加符合使用者需求;造型设计简洁,结合使用环境与用户视觉特性,采用高强度的钢板与防锈防腐工艺处理,选择橙色与黑色为主体颜色;考虑山地、坡地的种植环境,底盘设计选择倒梯形底盘,稳定性和爬坡能力优良;末端执行器由两个夹持装置与四个切断装置组成,并且均带有摄像头,在采摘过程中能够精准识别果穗与采摘点,腕关节与末端执行器均带有转动关节与扭动关节,用于调整末端执行器的空间姿态,符合末端执行器的运动精度要求;花椒收集箱采用抽屉式;发动机采用柴油发动机,保证充足的动力,如图6所示。
结语
基于“人-机-环境”系统理论模型,对“人-机”“环境-机”进行了深入分析,根据“人”与“环境”两个因素的影响对采摘机进行设计创新,使花椒采摘自动化,采摘效率、采摘精准度大幅提升。新型采摘机为当前花椒基本靠手工采摘、劳动力短缺、采摘成本高等问题提供有效解决方案,使花椒产业在增产的同时实现增收,更加满足椒农使用需求。结果表明“人-机-环境”系统理论在农机设计时有着良好的指导作用,使花椒采摘机的设计既能符合用户需求,又能适应作业环境。该类设计方法对我国多样化的地貌特征所需的多样化农机设计有着一定指导意义,也为农业生产、现代农业园区的推进,特别是山区生态农业带来积极的影响,在一定程度上推动乡村振兴。
基金項目:本论文得到中央高校基本科研业务费专项资金资助(项目批准号:2021VI040)。
参考文献
[1]马君义,张继,冯洋洋,黄玉龙,李佳佳,邢润苗,魏相龙.甘肃花椒产业发展现状及对策分析[J].安徽农业科学,2011,39(16):10055-10057+10091.
[2]李凯欣. 花椒采摘机器人控制系统研究与设计[D].兰州理工大学,2020.
[3]刘蒙蒙.花椒采摘机器人的机械系统方案设计及其关键技术研究[D].兰州理工大学,2019.
[4]张永梅,李菊霞.成熟花椒果实的自动识别技术研究[J].农业技术与装备,2019(01):4-6.
[5]杨萍,郭志成.花椒采摘机器人视觉识别与定位求解[J].河北农业大学学报,2020,43(03):121-129.
[6]侯维,廉通,彭小芮.多举措推动县域特色农产品蓬勃发展——以汉源花椒为例[J].乡村振兴,2022(01):54-55.
[7]陈信,袁修干.人机环境系统工程总论[M].北京:北京航空航天大学出版社,1996.
[8]孙凝晖,张玉成,石晶林.构建我国第三代农机的创新体系[J].中国科学院院刊,2020,35(02):154-165.
[9]中共中央统一战线工作部网站.2022年中央一号文件公布 提出全面推进乡村振兴重点工作.[EB/OL].(2022,02,23)[2022,03,01]http://www.zytzb.gov.cn/szyw/367597.jhtml.
[10]刘妤,谢铌,张拓.小型山地履带底盘设计与仿真分析[J].机械设计,2020,37(06):115-122.
[11]殷玥.基于嵌入式PC和物联网的无人驾驶拖拉机研究[J].农机化研究,2018,40(01):247-251.
[12]张驰洲.基于惯性导航的扫地机器人关键技术研究与实现[D].南昌大学,2020.
[13]丁玉兰.人机工程学(第5版)[M].北京:北京理工大学出版社,2017.
[14]隋显航,郭辉,李显华,林凤森,李光友.碳纤维增强环氧复合材料机械臂结构设计与性能研究[J].化工新型材料,2020,48(07):235-237+243.
[15]柳国光,杨自栋,张加清,王涛.笋用毛竹林履带式动力底盘研制[J].中国农机化学报,2019,40(09):131-135.
[16]孙虎,周洁,雷颜瑞.基于人机环境系统的喷流式挖藕机改良设计[J].包装工程,2019,40(22):130-135.
[17]厉钰琪,巩淼森.复杂驾驶任务下基于多资源理论的汽车人机交互设计方法[J].设计,2022,35(10):24-27.
[18]汪瑞,沈伟豪,宋吉明*.基于公共利益的纯机械拉线式水果采摘器设计[J].设计,2022,35(11):136-139.
[19]井忠祥,漆磊,杨承龙.月球营地机械爪设计[J].设计,2021,34(12)125-127.
