直接序列扩频智能超声雷达建模与信号处理*
2022-12-07李翔宇殷树娟
孟 洁,李翔宇,殷树娟
(1.北京信息科技大学 理学院,北京100192;2.深圳清华大学研究院,广东 深圳518057)
0 引 言
利用人工智能技术对雷达回波信号进行分析可以实现复杂目标的识别,具有很大的应用潜力。例如,基于智能雷达技术的手势交互技术因其无隐私泄露、简单、自然、易于掌握和理解等优点被认为是更适用于可穿戴设备的人机交互方式。现有主要智能雷达实现方案有的基于WiFi等射频信号[1-4],有的基于超声波[5-6],有的基于毫米波雷达系统[7-8]——这些方案所采用的雷达体制有调频连续波[9]、脉冲多普勒[10-11]、多普勒雷达等[12-14],但它们都只能一套系统孤立工作。在人员聚集的空间中通常有多个同类设备同时工作,某一设备发射的探测信号可能直接或通过散射进入其他设备,形成虚假目标,彼此干扰。而多套设备近距离同时工作是可穿戴设备人机交互应用的必备要求,在频率资源有限的条件下,解决多个相同频率的雷达收发器之间的信号干扰问题成为了手势识别等智能雷达应用必须解决的关键技术。
直接序列扩频(Direct Sequence Spread Spectrum,DSSS)技术基于码分复用原理,可以分解采用不同扩频码调制的具有相同载频的信号,是解决上述问题最有潜力的技术方向。因此,本文对基于DSSS调制技术的手势识别系统的原理进行探索。手势识别和其他大多数智能雷达的典型工作原理是通过信号处理得到回波的距离-多普勒图像(Range-Doppler Map,RDM),然后利用人工智能技术对RDM进行特征提取与分类,RDM生成是手势识别等智能雷达系统信号处理的关键。近年来,虽然DSSS雷达已被广泛应用于多种雷达系统[15-17],但这些研究都是以测距为主要目的,目前尚无成熟的分解来自多个发射器的回波信号并得到目标RDM的信号处理方案。
本文通过数学推导给出了DSSS雷达信号分解及RDM生成的具体信号处理算法。为了验证算法的有效性,使用Matlab建立了DSSS超声雷达手势识别系统的收发机和回波信号模型,该模型采用一种新的发射波回溯算法,具有通用性强和仿真度高的优点。
1 原理与算法
1.1 手势识别原理
雷达发射机向探测空间发射信号,手势动作会对入射的信号产生调制效应并将其反射回去,使回波信号中包含关于手的各个部位的运动信息。手势识别把手看成多个散射中心组成的非刚体目标,并以RDM作为识别手势的原始特征。RDM是一个二维的灰度图像,图像平面的两个维度分别是径向距离和多普勒频率(与散射中心的径向速度成正比),图像的像素值是能量值,所以它是不同径向距离和径向运动速度的散射中心的回波能量分布图。RDM中能量值超过噪声水平的像素点的位置间接反映了目标各个部位的距离和速度情况,所以RDM特别适合表征非刚体目标的运动和形变情况。接下来,使用机器学习的分类算法依据RDM数据特征对回波信号进行分类,即可从预先定义的有限手势集合中识别出所探测到的手势类别。
1.2 基于DSSS的RDM生成算法
适用于多系统同时同地工作的DSSS手势识别雷达系统的工作原理是:每套系统采用独特的扩频序列对载波进行相位调制后发射,接收时通过回波信号与扩频序列的相关解扩,从相关函数中获得回波信号的延迟信息。不同设备采用彼此正交的扩频序列,利用正交扩频码之间的弱互相关性可以抑制不相关的信号分量。这是一种码分复用的频段复用方式,可以解决多个相同频率的雷达设备之间的信号干扰问题。
下面以两个设备同时工作的场景为例,推导具体的信号处理方案。设相互正交的两组等长的二进制扩频码序列x(n)和y(n),理想情况下它们的互相关系数等于0。把每个扩频码的0、1码元值分别转换成-1和+1,并使各码元持续一个固定的时长,就可以产生对应的时域连续的扩频信号x(t)和y(t),其时间长度为Tr。两个设备(记为X和Y)分别通过使用各自的扩频信号与相同频率的载波信号相乘完成二相位调制。设ωc为超声波收发器的中心角频率,DSSS雷达以Tr为周期,重复发射已调信号,分别采用x(t)和y(t)扩频的两路发射信号TX、TY在第n个重复周期内的值为
(1)
假设设备中的发射器和接收器的距离远小于目标距离,则可近似认为目标到达发射器和接收器的距离相等。设第n周期起始时刻目标到X和Y设备的距离分别为R1和R2,Vs为超声波在空气中的传播速度,由目标径向运动引起的多普勒角频率分别为ωd1和ωd2,则任一设备接收到的回波信号都是两路发射波形的混合回波。若A、B分别作为两路信号的衰减系数,对应式(1)的第n个周期内的回波信号解调后得到的基带信号为

(2)
式中:t∈[nTr,(n+1)Tr]。
在DSSS体制下,解调后的回波时域信号无法直接获得延时信息,也难以提取多普勒频率。针对此问题,本文方案从回波与扩频信号之间的互相关函数中提取距离-多普勒信息,生成RDM。在某一个设备中的具体做法是:对于X设备,采用扩频信号x(t)和每个Tr内的回波基带信号计算互相关函数进行解扩,第n个重复周期内得到的相关函数为
(3)
将式(2)代入式(3)可得

A·x(t-nTr+k-τx)·
exp{j[ωdx·(t+k)-ωcτx]}dt+
B·y(t-nTr+k-τy)·
exp{j[ωdy·(t+k)-ωcτy]}dt=
A·exp[j(ωdxk-ωcτx)]·
x(t-nTr+k-τx)·exp(jωdxt)dt+
B·exp[j(ωdyk-ωcτy)]·
y(t-nTr+k-τy)·exp(jωdyt)dt。
(4)
式中:k为相关函数的偏移量;τx和τy分别是在第n个周期时目标距离对应X、Y设备的两路回波延迟时间;ωdx和ωdy分别是目标第n个周期相对于X和Y设备的径向速度对应的多普勒角频率。因为多普勒频率通常远低于信号的重复频率,所以式(4)中的exp(jωdxt)和exp(jωdyt)项在[nTr,(n+1)Tr]的时间范围内变化很小,可分别用常数exp(jωdxnTr)和exp(jωdynTr)近似[18],从而得到

exp(jωdynTr)·Rxy(k+τy)。
(5)

Rxx(k+τx),
(6)
即完成了对混合回波中无关的Y路信号的抑制。
将一个相参处理周期(Coherent Processing Interval,CPI)内的N个周期的相关函数值根据快时间和慢时间划分成一个二维数据矩阵——快时间是指在一个Tr内的时间,以基带信号采样间隔ts为时间单位;慢时间是指以Tr为时间间隔的采样时刻序列,是周期数所在的维度,对应一个CPI内的N个相关函数。由式(6)可知,经过相关解扩后,对于任一给定的快时间偏移量k=m×ts,互相关函数组成的慢时间序列R[n,k](n=1,2,…,N)具有ωdx的频率,因此,通过对每个互相关函数慢时间采样形成的序列做离散傅里叶变换可以得到多普勒频率信息。对应给定的慢时间n,快时间互相关序列中峰值出现的位置(k=-τx)对应本设备发射信号的回波延迟时间,即目标的距离信息。按照上述转换方法,即可将快时间-慢时间相关函数数据矩阵变换为距离-多普勒数据矩阵。考虑到真实扩频序列之间的互相关系数并不为零,为了进一步抑制干扰分量以便后续信号处理和观测,还需要采用γ>1的伽马变换对距离多普勒数据矩阵进行处理得到最终的RDM图。
一幅RDM图可对一个CPI内的回波进行表征,手势识别系统在识别一次手势时按照一定时间间隔采集多个CPI的回波数据并处理,得到一组随时间变化的RDM图序列,该序列即可作为整个手势运动过程的原始表征数据。
1.3 系统结构
根据上述数学原理,DSSS雷达系统的前端(即在识别之前的功能)构成如图1所示。

图1 系统信号流图
1.3.1 发射部分
发射部分的主要功能是产生基带扩频序列,并对载波进行扩频调制,通过发射器(TX)发射已调信号。本文系统采用40 kHz的超声波发射器。发射部分从预先生成的一组伪随机二进制序列中选择一个序列作为本设备的扩频序列,按照上一节所述方法生成对应的连续扩频信号,再将连续扩频信号与频率fc=40 kHz的余弦波相乘,完成相位调制。
扩频序列的设计是发射部分的关键点。本文系统采用4阶m序列作为扩频序列[19]。两个设备各自使用的m序列的本原多项式分别如式(7)所示:
(7)
图2显示了随机选取的一条m序列进行扩频的效果(该实验中码元时长tc设为0.4 ms)。
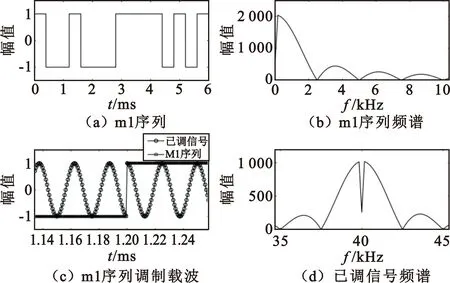
图2 m序列调制载波及其频谱图
正交性是扩频序列的关键性能指标。为了检验所选扩频序列方案的正交性,在所生成的m序列集中任选5条31位长的序列,计算它们两两之间的互相关系数。统计所有互相关系数结果得其平均值为0.345,最大值为0.387。由此可知,所选m序列集的互相关峰值都在自相关函数峰值的38.7%以内,能够对其他发射器信号起到抑制作用。
1.3.2 接收部分
接收部分包括接收器和接收信号的处理通路两部分,在多个系统同时同地工作时,每个系统的接收器接收到的都是不同发射波的回波叠加后的混合回波。接收信号处理通路首先采用I/Q解调方式对信号进行解调;再在每个序列周期内对解调后的信号和基准相位的扩频序列按照式(3)进行相关处理,完成解扩;最后按照1.2节所述的变换方法得到RDM。此后的步骤和其他雷达体制所实现的手势识别系统一样,不是本文研究的范围。
2 仿真模型
为了进一步验证本文方案的有效性和可行性,使用Matlab平台构建仿真环境进行实验。进行仿真的关键难点是如何尽量真实、准确地模拟发射波和回波信号。首先,收发器的带宽直接影响扩频序列的参数选取,因此本模型必须模拟收发器的频响特性。其次,手势目标的运动情况复杂,难以直接得到对应的回波信号解析表达式,因此需要一个回波综合器——它可以根据指定的目标运动轨迹和任意的入射波形自动生成对应的回波信号。本节围绕上述关键模拟技术进行介绍。
2.1 收发器模型
本模型中用带通滤波器来模拟超声波换能器的行为。系统采用的超声波发射器件为村田制作的MA40S4S,该发射器件相当于一个中心频率为40 kHz、-20 dB频率大约在35 kHz和45 kHz处的带通滤波器。据此设计滤波器模拟收发器的频响特性,其频谱特性如图3所示。系统所使用的MA40S4R接收器的频率响应特性与发射器类似,也采用相同的带通滤波器模型模拟。
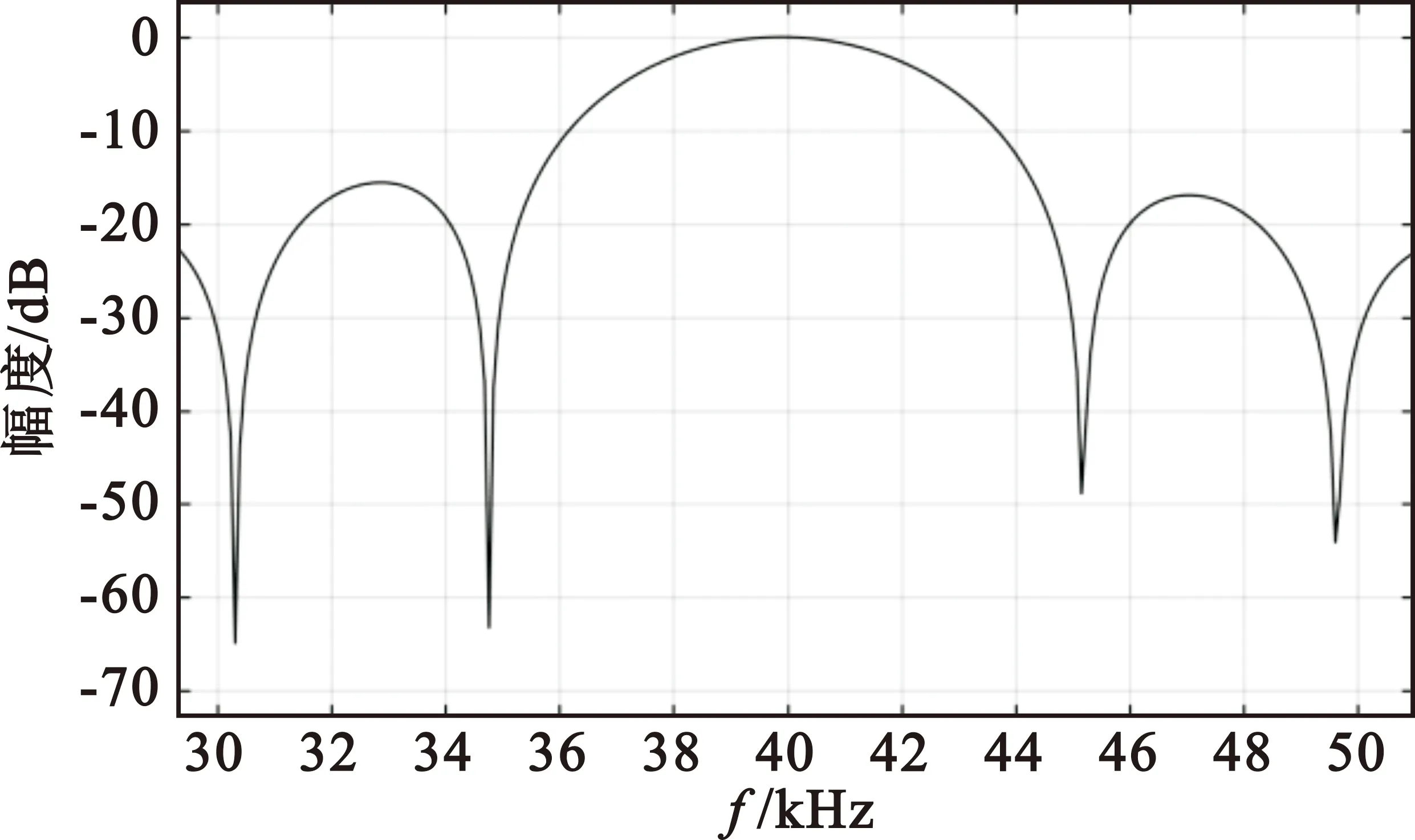
图3 带通滤波器频谱特性
2.2 回波综合器
回波综合器模拟发射信号经过手势动作调制后产生的相应回波。回波综合器由目标动力学模型和回波生成器两部分组成:目标动力学模型是特定手势运动过程中各个散射中心的空间位置和瞬时运动速度矢量随时间变化的轨迹;回波生成器则是根据相应的轨迹生成目标的回波波形。手势形状和运动的不规则性以及DSSS调制模式的复杂性使得难以写出回波的解析表达式,也难以依靠数学推导准确预测出目标运动分量较多条件下的多普勒效应和干涉现象。为了解决上述难题,且不受发射波体制以及手势的限制,本文设计了通用化的回波综合算法:生成回波时把目标看作多个独立的散射中心,先根据轨迹模拟每个散射中心的回波,然后对回波进行矢量叠加从而得到整体的回波;在模拟每个散射中心回波时采用了“发射波回溯”的模拟算法。该算法通过数值方法模拟每个时刻的信号振幅和相位,将连续的发射波形离散成等间隔的时间序列。
设发射器的位置矢量(绝对坐标系原点指向发射器位置的矢量)为Remit,接收器位置矢量为Rrec,temit时刻发射的波接触目标并反射的时刻为tf,该时刻该目标的位置矢量为R0,r为收发器的径向单位矢量,接收器接收到该点的反射波的时刻为t,则t时刻的回波值即等于temit时刻的发射波值乘以传播过程和散射中的能量衰减因子。因为发射波形序列已知,所以预测t时刻回波值的关键是计算temit。首先,对于给定的时刻tf,动力学模型提供了R0,根据这一对数据和发射器的位置就可以计算出temit,相应算式为
(8)
类似地,可以计算对应的回波入射接收器的时刻t,相应算式为
(9)
temit时刻的发射波值乘以衰减系数(衰减系数值可以从波传播的距离计算得出)即可作为t时刻的回波信号值,如果t时刻不是回波信号的采样点,则把该值赋给最近的采样时刻;如果temit不是发射信号的采样点,则取最靠近temit时刻的采样点的值近似。考虑到按照上述方法得到的回波信号序列的采样时刻间隔是不均匀的,为了保证模拟的精度,发射信号和动力学模型轨迹的采样率以及回波综合器输出的回波信号的采样率均远大于系统对回波的ADC采样频率(fs-out=320 kHz),设回波综合器各模型信号的采样频率fs=4×fs-out=1 280 kHz。回波综合器最终的输出信号按照ADC采样率对原始回波信号进行抽样,得到用于后续信号处理的离散回波信号。
上述方法得到的是某一个发射器的回波信号,在实验中测试两个发射器同时工作的场景时,实际输入给接收器的信号是两个回波序列按时间点相加后的波形。此方法和直接用解析函数表示回波的仿真方法相比,因为模拟了波的传播过程,所以更接近物理实际,而且和发射波以及目标的情况无关,通用性强,模块化好——对于不同形式的发射波都适用,实验结果证实其可以模拟出多普勒效应、干涉等现象,能够胜任不同调制方式和参数、复杂目标和复杂运动场景的仿真。
3 实验分析
3.1 系统仿真
为了验证本文算法,除了上述收发器模型和回波综合器,本文还用Matlab实现了所提出的系统模型,该模型包括扩频码生成、发射信号的扩频与调制和接收信号从ADC到生成RDM序列的信号处理流程。基于系统模型、收发器模型和回波综合器搭建的仿真平台进行如下实验:在空间中放置两个发射器X和Y,一个接收器。实验环境坐标系设定为:以发射器X为原点,竖直向上为z轴,使接收器与发射器处于同一平面,垂直于发射器-接收器平面为x轴(指向探测空间为正方向)。相关设备具体坐标为:发射器X(0,0,0)m,发射器Y(0,0,0.2)m,接收器(0,0.05,0)m,如图4所示。

图4 系统设备位置图
以匀速远离的单个理想散射中心为目标,设定其初始坐标为(0.025,0,0)m,沿x轴正方向以v=0.2 m/s的速度运动0.5 s后停止。为实现上述直接序列扩频体制方案,发射器X和Y分别采用x(t)和y(t)对同频载波进行扩频调制。扩频序列越长,其正交性越好,但是最大码长受到重复周期和码元时长的限制。因为收发器带宽约为5 kHz,所以实验中选取码元时长tc=0.4 ms,根据允许的最大重复周期确定本系统的扩频序列码长为15,仿真系统1 s的工作情况。
作为对比实验,又搭建了使用经典的相参脉冲串雷达体制[11-12]的系统模型,采用相同的动力学模型仿真相同目标运动情况下的RDM序列作为对照组。所用相参脉冲串信号参数为:脉冲宽度与码元时长相等,脉冲重复周期和CPI参数也和DSSS方案一致。
对比实验结果如图5所示,(a)和(b)分别代表两种信号体制下得到的回波信号的RDM,x轴为距离维,y轴为速度维,图中像素的明暗程度反映了目标回波信号的能量大小,高亮区域的横纵坐标分别对应目标相对于发射器与接收器连线中心的径向距离和径向速度。其中,图5(a)分别给出了接收器以x(t)和y(t)进行解扩得到的两路发射信号回波的RDM图,可见图中都只有一个明显的高亮区域,且在图中的位置不同——这表明另一发射器的回波信号已被抑制,位置不同是因为同一目标到达不同发射器的径向距离和速度不同。图5(a)说明本文所提出的DSSS体制和信号处理方法可以有效分离不同发射器的回波信号。相反地,在图5(b)中同时出现了两个高亮区域,这说明在脉冲串体制下两个发射器的回波信号产生了彼此干扰,基于图5(b)的RDM图,后端目标识别算法会误认为空间中同时存在两个目标。
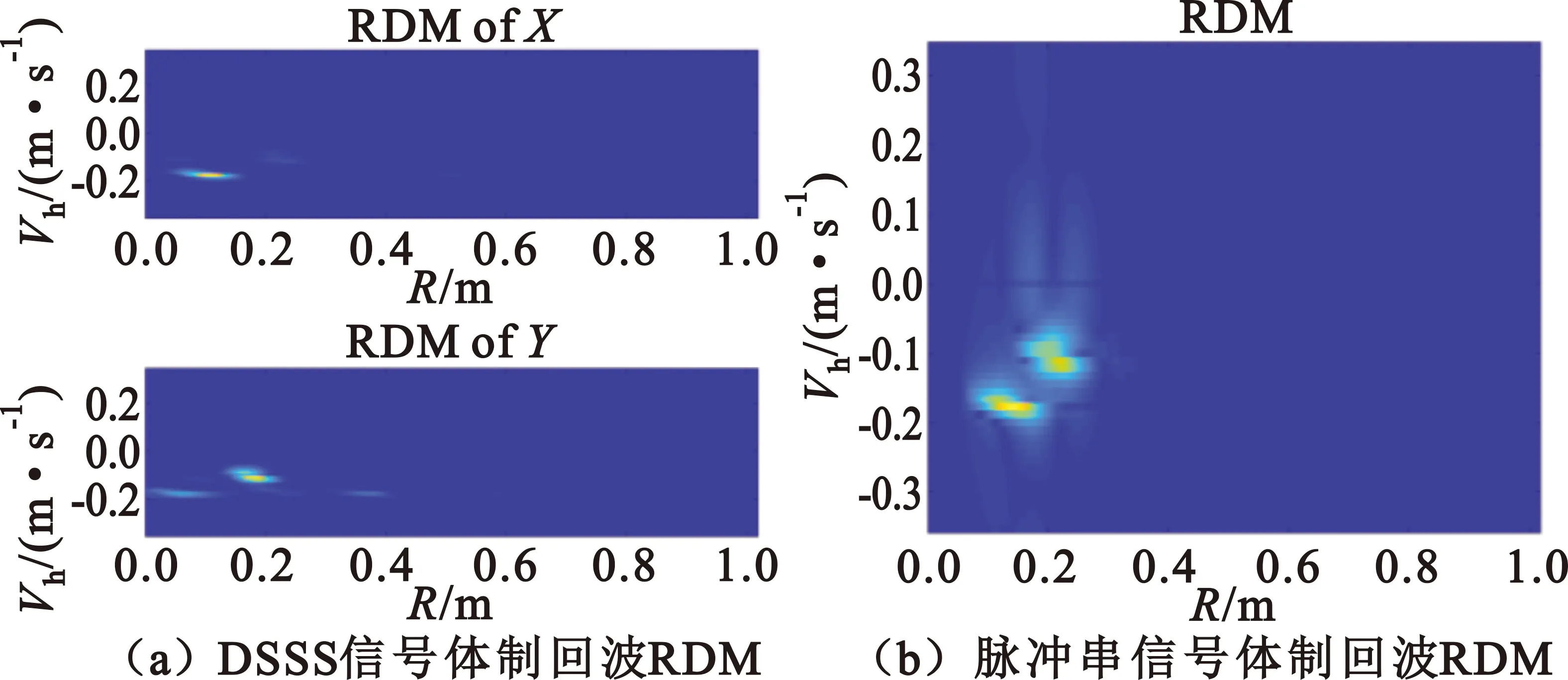
图5 回波信号的距离-多普勒图
为了直观地判断系统生成的RDM的正确性,本实验通过目标运动过程中不同时刻的距离像(Range Profile)和速度像(Doppler Profile)变化进行观察判断。距离像是对一幅RDM图中每列数据求和得到的一个一维向量,该组数据反映了回波能量在不同径向距离单元上的分布。速度像则是对一幅RDM图中每行数据求和得到的一维向量,反映回波能量在不同径向速度单元上的分布。将目标运动过程对应的一组RDM序列的多个距离(速度)像按时间顺序排列拼接在一起,即可表征回波能量在距离和速度维度上的分布随时间变化的情况。本实验中,DSSS体制下得到的距离像与速度像变化情况如图6所示。

图6 匀速运动目标的距离和速度随时间的变化
图6(a)和图6(b)中的左图为距离像变化图,右图为速度像变化图。从图6(a)(左)中可以看到,随着时间推移,高亮区域逐渐上移,并在t=0.5 s附近开始保持水平,即表示目标持续远离0.5 s后停止,且由图可得整个运动过程中目标距离变化约为0.1 m;根据图6(a)(右)可知运动过程中主要速度分量在-0.2 m/s附近(负号对应远离),且在t=0.5 s后恢复至0 m/s。由图6(b)可知发射器Y的回波具有相同运动趋势,但高亮部分的位置整体偏上,这是因为目标到Y的距离比到X远。这一结果符合前述目标运动情况的设置,说明基于本文信号处理方法的DSSS体制雷达系统得到的RDM序列是正确的。
3.2 性能分析
3.2.1 精度测量
仿真得到目标运动过程中不同实际距离和速度下的距离像和速度像,先定位距离像峰值对应的距离值,再使用最小二乘法校准得到距离测量值。速度测量值也采用类似方法从速度像中得到。修正后的距离、速度测量值与目标相对于两个设备的实际值的对比如图7所示,统计精度数据如表1所示。
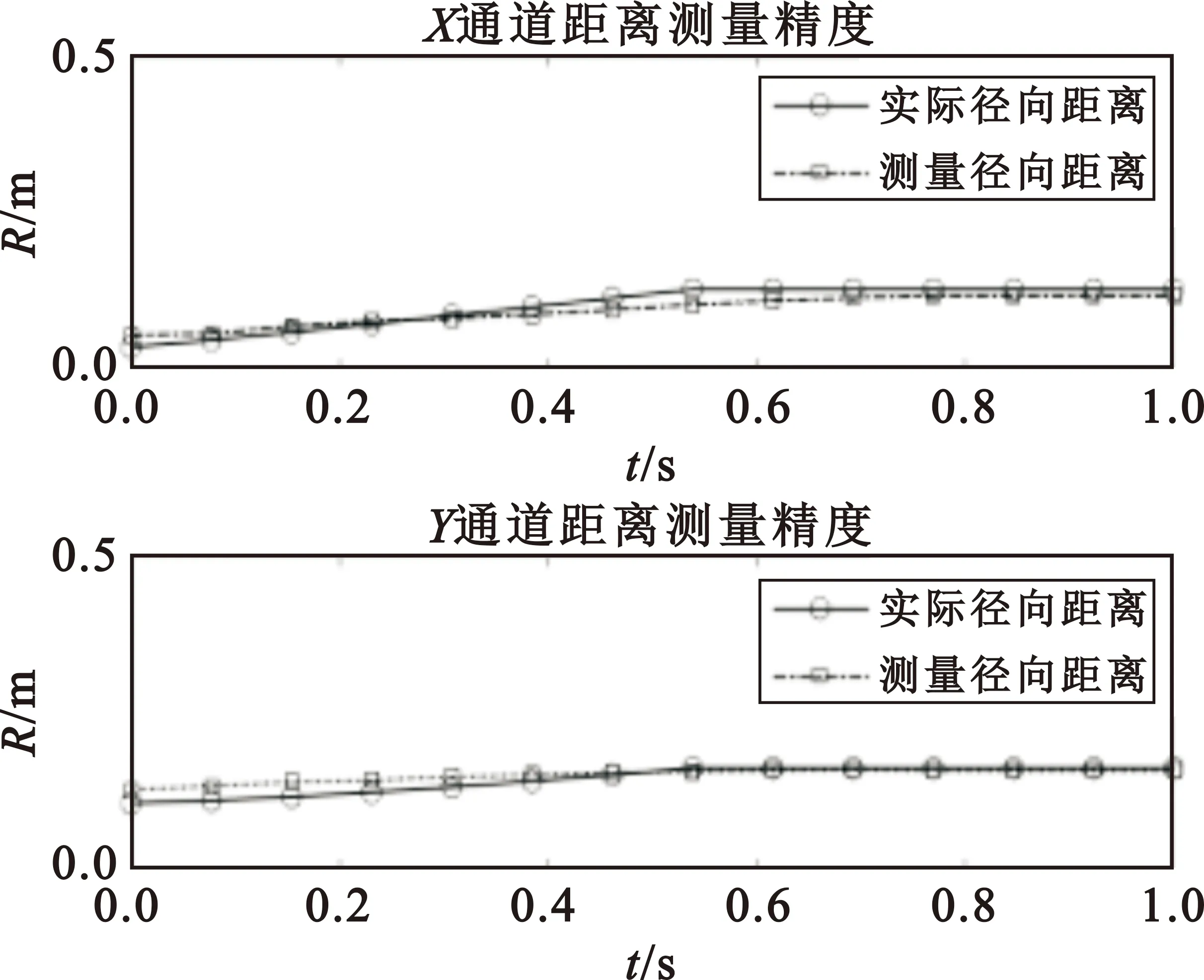
(a)距离测量精度

(b)速度测量精度图7 测量精度对比

表1 测量精度统计结果
3.2.2 距离分辨率
本文在模拟器中同时放入两个沿径向排列的彼此靠近的静止散射中心,只放置一个发射器和一个位置重合的接收器,仿真得到原始相关曲线,从重合开始逐渐增大两个散射中心之间的距离,重复实验,直到相关曲线有两个尖峰且两个的尖峰之间的幅值落差等于幅度的一半为止,此时对应的散射中心距离即作为系统的距离分辨率。实验测得在DSSS体制下系统距离分辨率ΔR=4.03 cm,能够满足手势识别应用,此距离下对应的相关曲线如图8(a)所示。使用同样方法测量脉冲串体制下的距离分辨率,不同之处在于观察对象是回波基带信号的时域波形,测得的距离分辨率为7.87 cm,对应的回波基带信号波形如图8(b)所示。由此得出本文方案的距离分辨率比脉冲串方案更优。

(a)DSSS体制系统距离分辨率
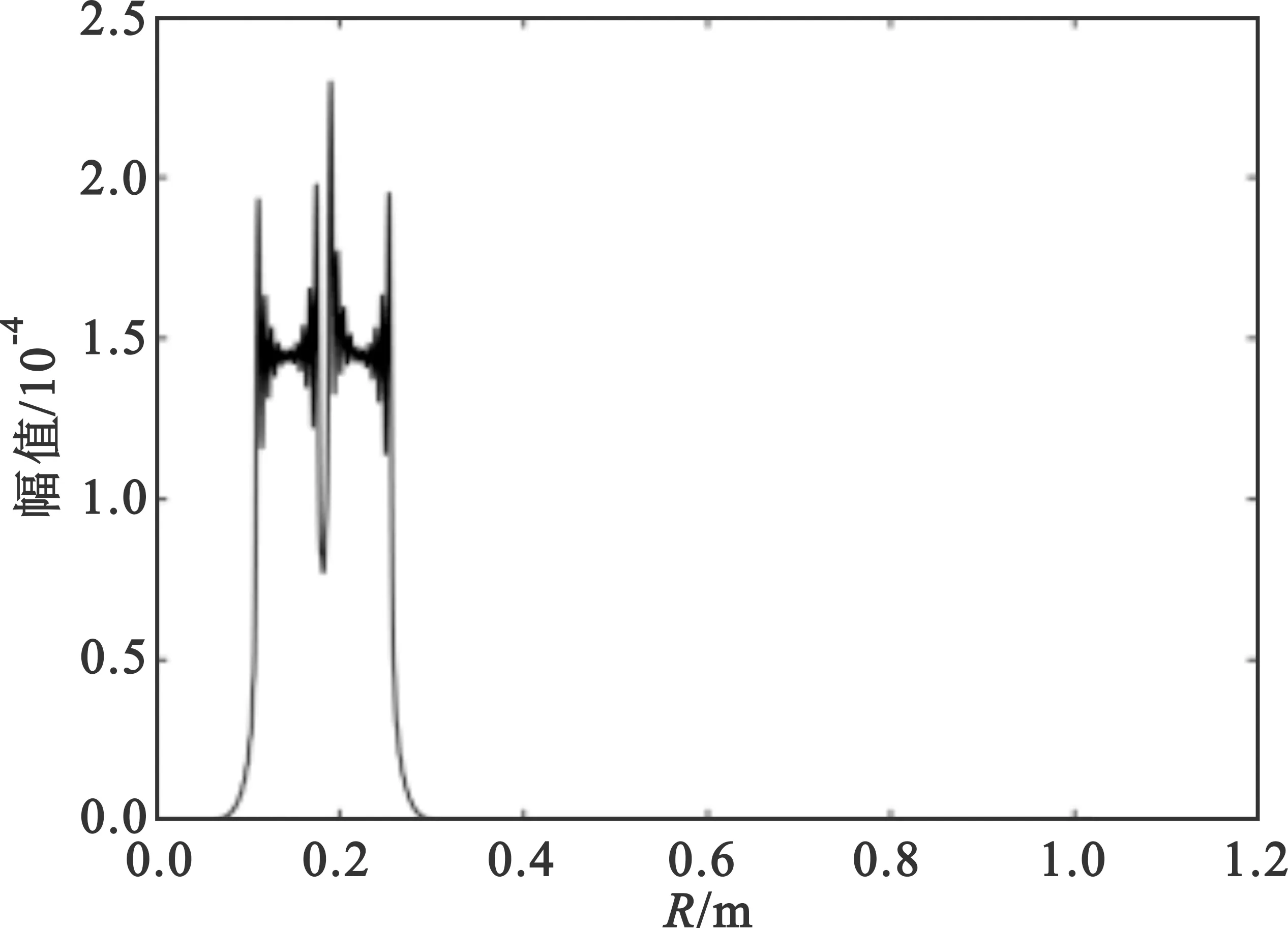
(b)脉冲串体制系统距离分辨率图8 实测系统距离分辨率
4 结束语
本文给出了DSSS体制下的RDM图生成算法,并确定了一组扩频序列产生参数;建立了超声手势目标和DSSS雷达系统的仿真模型,基于该模型进行了初步的实验,验证了在该算法下DSSS技术可以分解不同发射器的回波并得到正确的RDM图,具备应用于手势识别的可能性。模型中加入了对收发器有限带宽效应的模拟,提出的发射波回溯算法解决了目标在复杂情况下的回波模拟问题,并具有通用性。
本文工作对进一步实现实际的DSSS超声手势识别系统具有指导意义,但如何实现真实的DSSS超声手势识别系统还需要进一步深入研究。
