基于双时间点检测的毫米波雷达人流量监测方法*
2022-12-07陈金立瞿彦涛冯仰歌付善腾王礼正范晨阳
陈金立,瞿彦涛,冯仰歌,付善腾,王礼正,范晨阳
(1.南京信息工程大学 电子与信息工程学院,南京 210044;2.南京常格科技发展有限公司,南京 210031)
0 引 言
随着社会发展,人们的出行率不断提高,尤其是商场、车站和景区等公众场合的人流量增加,导致安全问题日益突出。2020年新型冠状病毒肺炎席卷全国,为了减缓疫情的传播,各地政府相继出台社交距离规定,因此对公共区域进行人流量实时统计具有重要意义[1]。
早期对公共场所的人流量统计主要使用人工计算的方式,该方法人力成本高,管理复杂,不利于快速发展的大数据分析及其应用。为此,国内外的学者研究了自动统计人流量的方法。基于红外线传感器探测的人流量监测方法[2]利用发射红外线的发光二极管和感知红外线的接收二极管,实现红外线感应,对经过感应区域的具有一定温度的目标自动计数,但是该方法应用场景有限,不能区分目标个体的运动方向,且难以分辨多人并排行走的情况。基于超声波探测的人流量监测方法[3]通过对超声回波信号处理来实现人体目标位置测量,实现人流量的统计,但此方法作用距离有限,容易受外界环境的干扰,存在测量盲区。随着人工智能算法的兴起,视频监控成为人流量监测的主要方式之一,目前基于视频监控系统来统计人流量的方法主要有基于图像底层特征的方法[4]、基于特征点运动轨迹的方法[5]以及基于运动目标的检测跟踪方法[6]。然而,基于视频监控的人流量监测技术利用摄像头等光学传感器,对于光照、烟雾等环境因素敏感度高,难以全天候工作,同时采集的监控数据存在人员隐私泄露的风险[7]。
针对上述人流量监测方法的弊端,本文使用调频连续波毫米波(Frequency Modulated Continuous Wave,FMCW)雷达进行人流量监测。由于毫米波雷达的距离分辨率高、发射功率低、穿透能力强[8-9],进行人流量监测时不会涉及个人隐私的信息,受光线、烟雾等环境因素影响小,且具备全天候工作能力。与视频监控方法相比,利用毫米波雷达进行人流量监测仍然存在诸多难点:毫米波雷达获取的目标信息量较少,缺乏视觉识别能力,无法提取人的面部特征;场地以及同行的人员之间存在多径干扰,形成虚假目标,从而造成统计的误判;人体散射的点云数据进行聚类处理时,易受噪声点数的干扰,从而出现虚警现象。为了克服以上难点,本文首先建立人体目标回波信号模型,通过对人体目标回波信号进行二维快速傅里叶变换(Two-dimensional Fast Fourier Transform,2D FFT)处理来获得人体散射点的距离以及多普勒频移信息;接着利用恒虚警(Constant False Alarm Rate,CFAR)处理滤除杂波散射点,对保留散射点进行方位角估计,获取人体散射点的角度信息,并使用二维坐标变换得到点目标位置,与对应多普勒频移信息一起构成点云数据;然后依据多普勒频移的正负来判断人体的运动方向,同时根据人体运动时不同部位多普勒特征的差异对点云数据进行筛选以减少干扰点数,避免基于密度的聚类算法(Density-Based Spatial Clustering of Applications with Noise,DBSCAN)出现虚警问题;最后在双时间点对特定区域的人员数量进行统计,并利用双时间点之间所获取的聚类结果来进一步修正人流量数据,从而解决因人体行走速度不同而引起的误判问题。实验结果表明,该方法能够在不侵犯个人隐私的前提下以较高准确率来统计实时人流量。
1 人体目标回波信号模型
图1为本文人流量监测场景示意图,将毫米波雷达置于检测区域斜上方,可以更好地探测多个人体目标[10]。毫米波雷达模块选用TI公司的IWR6843评估板,板载3发4收天线,可以发射60~64 GHz的调频连续波信号,内部集成有射频前端、低噪声放大器、ARM处理器、DSP、内存等,可以满足对回波信号的中频采样缓存、多维FFT以及恒虚警检测等处理。毫米波雷达发射和接收阵列结构如图2所示,两个邻近发射天线的间距dt=5 mm,两个邻近接收天线的间距dr=2.5 mm。假设探测区域内有多个人体目标,共对应I个散射点,其中散射点i(i=1,2,…,I)的方位角为θi。
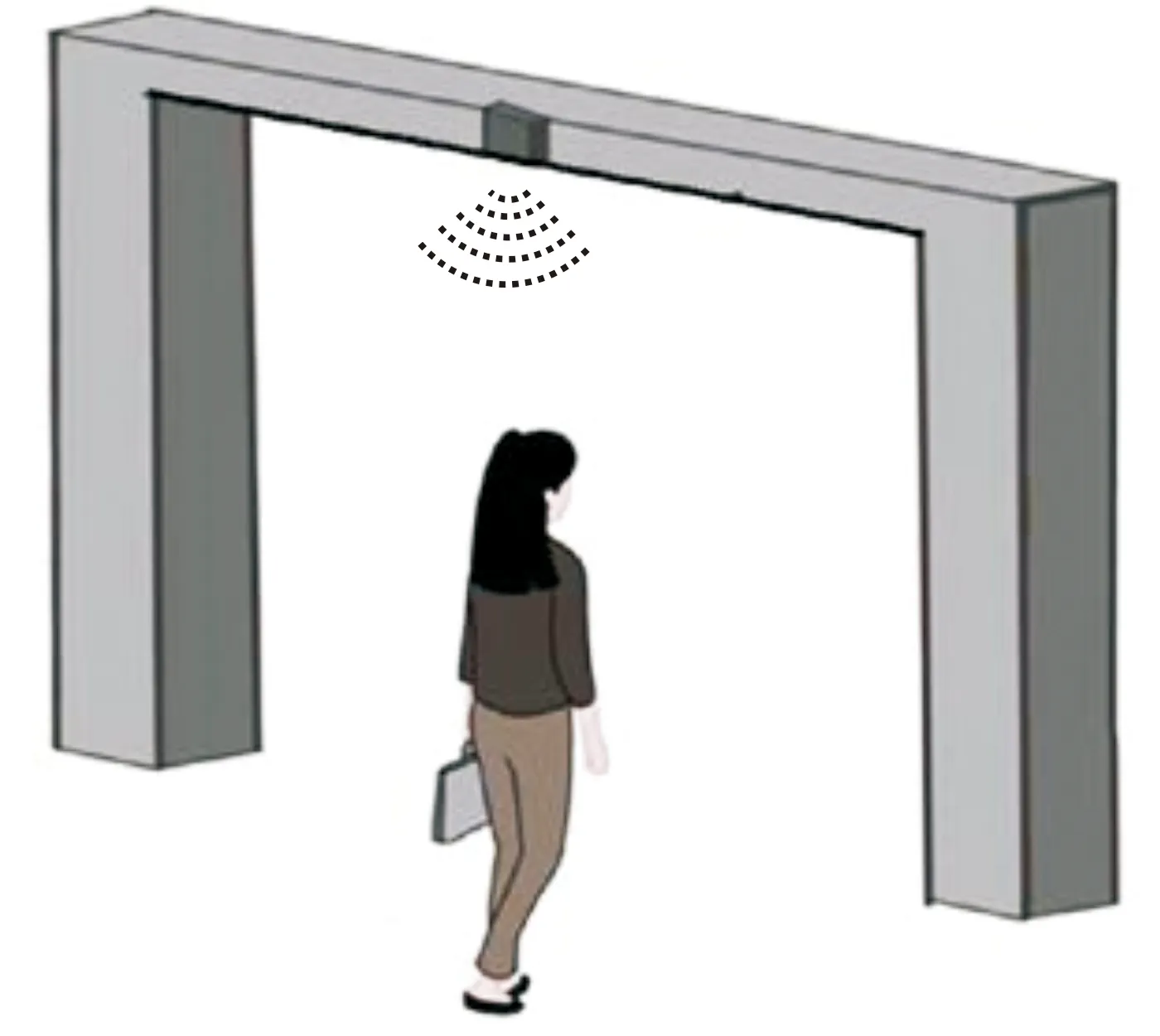
图1 人流量监测场景示意图

图2 毫米波雷达发射/接收阵列结构
假设调频连续波雷达发射锯齿形线性调频连续波,其发射信号为
(1)
式中:AT表示发射信号的幅度;fc表示Chirp的起始频率;B表示Chirp的带宽;Tc表示Chirp的持续时间;φ(t)表示相位噪声。FMCW雷达的回波信号为
(2)

(3)

对混频后的中频信号进行采样,假设每个周期采样点数为N,采样周期数为M,中频信号可以表示为采样矩阵形式:
(4)
式中:n=1,2,…,N表示快时间采样轴上对应的标号;m=1,2,…,M表示慢时间采样轴上对应的标号;Tf、Ts分别为快时间和慢时间轴上的采样间隔。
2 人体目标点云数据的获取
人体目标点云数据包含人体目标散射点的坐标和多普勒信息,点云数据的获取对于后续人体目标的凝聚和统计具有重要意义。
2.1 二维FFT处理
针对式(4)所示的雷达采样数据矩阵Y,中频信号频率fbi和多普勒频移fdi中包含每个散射点的距离和多普勒信息,故对雷达采样数据矩阵Y的每一行做N点FFT处理可求出目标的距离信息,每一列做M点FFT处理可求出目标的多普勒信息[11],其处理流程如图3所示。
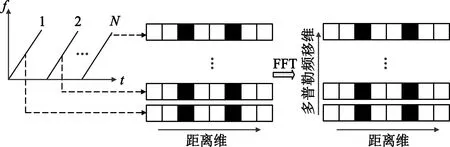
图3 二维FFT处理流程
2.2 恒虚警检测
人流量监测方法的使用场景多在拥挤的环境,因此在回波信号中往往会包含目标信息、背景噪声以及杂波干扰。为了实现对人体目标进行有效检测,需要滤除杂波散射点。CFAR算法是基于门限的目标检测算法,通过估算测试单元邻近参考单元的背景噪声和杂波功率,对接收机接收的包含有效信号和噪声进行判别,确定目标是否存在[12]。CFAR算法中最常用的是单元平均恒虚警检测算法(Cell Averaging-CFAR,CA-CFAR),通过对保护单元外的邻近单元取平均值来估算背景杂波功率。本文采用二维CA-CFAR检测器[11],对雷达采样数据矩阵Y的距离维和多普勒频移维分别进行恒虚警检测。
2.3 相位法测角
对于同一散射点i(i=1,2,…,I),其角度可通过两个接收天线所接收的回波相位差进行估算[13]。假设两个邻近接收天线的接收回波路程差为ΔRi,则第i个散射点接收信号在t时刻的相位差为
Δφi(t)=2πΔRi/λ。
(5)
由图2可知,两个邻近接收天线的接收回波路程差可近似为
ΔRi=dtsinθi。
(6)
由式(5)和式(6)可知,第i个散射点的方位角θi可表示为
(7)
因此,第i个散射点的二维坐标可以表示为
(8)
式中:xi和yi分别为第i个点目标在二维平面的坐标位置。综上可得到包含散射点位置和多普勒信息的点云数据,可用数据集P0表示为
P0:{(xi,yi,fdi),i=1,2,…,I} 。
(9)
3 基于双时间点检测的人流量监测方法
3.1 基于多普勒频移筛选的DBSCAN聚类
聚类方法通常将距离较近的点聚成簇,一个簇对应一个目标[14]。由于人体目标点云数据集P0规模较小且形状不规则,同时检测区域中人体目标的数量是未知的,因此选用DBSCAN算法。该聚类算法以点的密集程度为聚类依据,对聚类的形状没有偏倚,且不易受噪声的影响[15]。
在人流量监测应用场景中,除人体整体的躯干平动外,人的呼吸、心跳和手臂的小幅度摆动会产生微多普勒效应,对应多普勒频移较小的点云数据。本文设计了一种基于多普勒频移筛选的聚类方法,通过设置适当的多普勒门限来去除频移较小的这些点,以降低微动干扰点对聚类结果的影响。设置多普勒门限为ft,则去除多普勒频移较小的点之后的数据集P1为
P1:{(xj,yj,fdj)||fdj|>ft,j=1,2,…,J} 。
(10)
式中:xj和yj分别表示多普勒频移大于门限值的第j个点目标坐标位置;fdj表示第j个点目标的多普勒频移;J表示满足|fdj|>ft的所有散射点数;|·|为绝对值。目标相对雷达的径向速度以靠近雷达的方向为正,而目标的运动方向决定多普勒频移的正负,因此按照多普勒频移的正负将数据集P1分成人员进和出的两个数据集,即
(11)
式中:Pin和Pout分别表示人员进和出的点云数据集;J1和J2分别表示人员进和出的散射点数。分别对Pin和Pout两组点云数据使用DBSCAN算法进行聚类,将人员进和出的散射点数凝聚成人体目标的位置集合:
(12)

图4为仅有一个运动人体目标时传统DBSCAN方法和本文方法的聚类结果,可见传统DBSCAN方法聚类后出现虚假目标,而本文方法滤除了人体微动带来的频移较小的散射点,DBSCAN聚类结果正确。

(a)传统DBSCAN聚类

(b)基于多普勒频移筛选的DBSCAN聚类图4 单人进出时的聚类结果
3.2 基于双时间点检测的人流量监测
图5为检测区域示意图,雷达位于原点处,黑色虚线所围扇形区域为雷达扫描覆盖区域,阴影部分为人流量检测区域。以雷达为坐标原点建立二维坐标系,假设人流量检测区域为xi∈[xl,xr],yi∈[yl,yr],其中xl、xr、yl、yr分别为检测区域的边界条件。

图5 检测区域示意图


(a)人员行走速度正常时的示意图
(b)人员行走速度较快时的示意图

(c)人员行走速度较慢时的示意图图6 不同情形下人员行走示意图
(1)人员行走速度大于正常速度的情形
以人员进入为例,当人员行走速度大于正常速度时,可能会出现t1和t2时间点在检测区域内都没有检测到人体目标存在,此时对应两种情况:一种是无人员进入;另一种是由于行走速度较快,此时人员在Δt时间内快速通过检测区域而导致在t1和t2时间点均检测不到人体目标存在,如图6(b)所示。为了区分上述两种情况,通过遍历t1和t2之间的其余时间点在检测区域内的人员数据来进行修正,若检测区域内在间隔Δt时间内有超过一半的时间点能检测到同一行走路径上人体目标存在,则统计为进入人员数,反之则无人员进入。
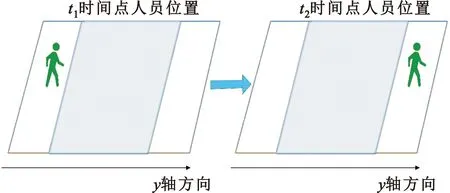
(2)人员行走速度小于正常速度的情形
以人员进入为例,当人员行走速度小于正常速度时,可能会出现t1和t2时间点在检测区域内都检测到人体目标存在,此时对应两种情况:一种是有不同人员进入;另一种是由于行走速度较慢,相同人员经过Δt时间仍在检测区域内,从而导致t1和t2时间点均检测到相同人体目标,如图6(c)所示。为了区分上述两种情况,仍通过遍历t1和t2两个时间点内的其余时间点在检测区域内人员数据来进行修正,若检测区域内在间隔Δt时间内有不超过一半的时间点检测到同一行走路径上人体目标存在,则统计为不同人员进入,反之则同一人员进入。
综上所述,本文提出的人流量监测方法流程图如图7所示。

图7 基于双时间点检测的人流量监测方法流程图
4 实验结果与分析
在实验室内模拟现实生活中人流量监测场景,通过搭建图8所示的实验场景来对本文方法进行测试。毫米波雷达带宽为4 GHz,单位帧下的Chirp数为128,帧周期为40 ms。在实际测试中,设置门宽约1.5 m,高约2.2 m,用三角支架将毫米波雷达固定在与门同高处,即检测区域斜上方,倾斜角α约为45°。设置多普勒门限ft=125 Hz。选择检测区域:xl=-1 m,xr=1 m,yl=1.2 m,yr=1.6 m。通常人员行走速度v≈1.1 m/s,设置对检测区域内人流量进行统计的时间间隔Δt=0.4 s,则满足条件(yr-yl)cosα 图8 实验场景图 图9 人员进出测试场景图 表1 不同场景人流量统计结果 由表1可知,针对5种场景,本文方法均能以较高的准确率统计人员进出,且通过设置多普勒门限去除干扰点,降低了虚警概率。图9(a)、(d)场景均获得不低于95%的监测准确率,连续单人进出时干扰点数较少,监测准确率高,双人间距1 m连续跟随进出时,雷达的距离分辨能力显著,因此可获得与连续单人进出时相似的监测准确率。由于本文方法根据多普勒频移正负将点云数据分成进和出的两个数据集分别进行统计,双人反向连续进出(图9(c)场景)时能达到不低于90%的监测准确率。人员密集时电磁波的多径传播现象明显,同时受到雷达的方位和距离分辨率的限制,双人同向连续进出(图9(b)场景)和双人间距0.6 m连续跟随进出(图9(e)场景)的监测准确率有所下降且漏警概率较高。 人流量监测数据对于公共场合安全具有重要意义,使用视频监控存在人员隐私泄露的风险。本文根据毫米波雷达体积小、成本低、分辨率高以及保护个人隐私等优势,提出了一种基于双时间点检测的人流量监测方法。该方法根据点云数据中的多普勒频移正负来判断人体的运动方向,同时设置多普勒门限值来去除频移较小的点,降低干扰点对聚类结果的影响。最后在双时间点对检测区域内的人员数量进行统计,并利用双时间点之间的人体目标聚类结果来进一步修正人流量数据,有效避免因人员行走速度差异而带来的多检和漏检问题。实验结果表明,本文方法能够在不侵犯个人隐私的前提下以较高的准确率来统计实时人流量。但是受限于雷达分辨能力,人员的密集程度往往会影响监测准确率,因此下一步将研究适用于多人进出复杂场景的人流量监测方法。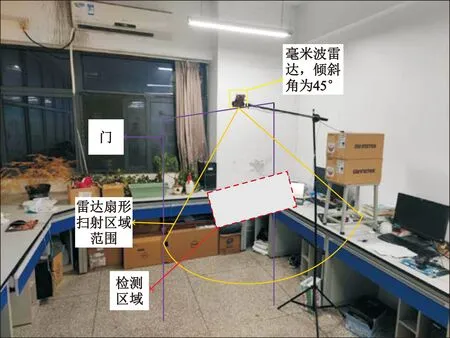



5 结束语
