基于S32G274A 的车载域控制器设计
2022-12-02张大霖马涛
张大霖,马涛
(东软睿驰汽车技术(沈阳)有限公司,辽宁沈阳 110179)
随着汽车智能网联的发展,传统的整车电子电气架构和车内网络通讯方式已经难以满足越来越多样化的功能需求。电子电气架构方面,域控制器+区域控制器的集中式架构正逐渐取代分布式架构成为主流[1],车内功能逐渐集中融合到域控制器中[2]。车内通讯方面,不同于传统基于信号的通讯架构[3],SOA(Service-Oriented Architecture)架构采用基于服务发布调用的方式,通过配置服务发布列表和调用列表来实现功能更新,不再需要更改整车通讯矩阵实现变更。作为整车电子电气架构的核心部件[4]和SOA 架构载体,域控制器相较于传统车载控制器在硬件上需要更为强大的处理芯片以提供更高的算力,同时在软件开发上也更注重降低耦合度,提高软件的复用度降低开发量。S32G274A 芯片是NXP 为适应整车电子电气架构的变革在2021 年推出的高性能域控制器处理器,S32G274A 芯片可以提供高达15900DMIPS 的算力,相较于传统车载处理器算力提升了十几倍。为了在提升算力的同时满足实时性和功能安全等级要求,S32G274A 采用异构架构(ARM A53 LINUX+ARM M7 RTOS)相较于传统只支持一种架构的车载处理器具有更广阔的应用空间,便于实现平台化开发。
1 硬件系统
1.1 需求分析
本文中的域控制器为整车的中央域控制器,作为整车的中央计算单元和网络通讯网关,需要在为整车车身和动力功能提供高性能算力的同时满足整车数据传输和转发的要求。主要的外设接口是以太网接口和CAN 通讯接口。其中,与车载网联终端,座舱域控制器,智驾域控制器分别有一路千兆网口(1000base-T1)和一路CANFD 进行数据传输。前后左右区域控制器作为中央域控制器的应用执行机构分别与中央域控制器通过一路百兆网口(100base-T1)和一路CANFD 传输数据。另外,针对一些传感器和暂时无法整合到区域控制器中的独立控制器(例如BMS 和电机控制器),预留了5 路CANFD 和2路LIN。总计需要三个千兆以太网接口,4 个百兆以太网接口和12 个CANFD 接口以及2 路LIN 接口。
1.2 硬件系统设计
S32G274A 有4 个MAC 接口,分别为PFE0,PFE1,PFE2 和GMAC。根据需求分析采用3 个独立千兆PHY 和一个SWITCH 来扩展以太网接口,千兆PHY 选用博通的BCM89883,SWITCH 选用博通的BCM89551 将一个MAC 扩展为4 个百兆以太网(100base-T1) 和1 个RJ45 的百兆工业以太网接口,RJ45 以太网接口可用于调试。CAN 芯片选取TJA1043 共计设计12 路,两路LIN 选取芯片为TJA1021。运行内存LPDDR4 规格2GB,EMMC 数据存储规格8GB。为满足国密数据加密的需求,采用了一个信大捷安的XDSM3276 的信息安全加密芯片。整个系统的电源芯片是NXP 与S32G 平台匹配的VR5510,板上还放置一个RTC 芯片用以实现定时唤醒检测功能,除此之外还预留了部分ADC 采样和I/O 控制接口。系统中关键元器件与S32G274A 的连接方式在图1 中做了标识。
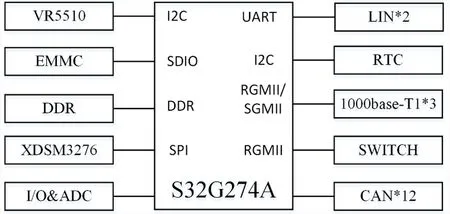
图1 系统框图
图2 给出了主要元器件在PCB 板上的布局,电源部分布置在PCB 板的右侧,主要的通讯芯片布置在PCB 板的左侧降低干扰,PCB 不含接插件的整板尺寸149mm*198mm。
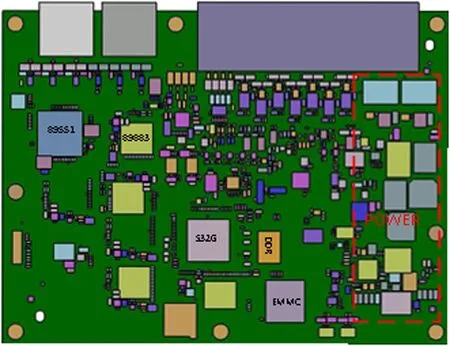
图2 PCB 布局
2 软件系统
2.1 整体架构
域控制器相较于传统控制器在软件架构上更加注重通用化和标准化,因此在软件架构上采取分层架构。应用层功能在核间的分配需要综合考虑功能安全等级,实时性和算力要求。A53 核的算力较高但是系统的功能安全等级和系统实时性等级较低,A53 核如果要求满足功能安全需求需要采用QNX系统,主要原因是LINUX 操作系统是开源系统,操作系统内核过于庞大无法进行功能安全的失效率分析,考虑QNX 操作系统有高昂的授权费因此对于没有功能安全要求的部分采用LINUX 系统以降低成本,LINUX 和QNX 系统通过HYPERVISOR 进行分割隔离,采用QNX 操作系统的两个A53 核在运行自身分配的功能基础上还要互为BACKUP 以保证其系统失效率。M7 核由于算力有限无法运行LINUX/QNX 系统,运行基于AUTOSAR CLASSIC平台的RTOS 系统,RTOS 系统虽然在内核调度能力上弱于LINUX 和QNX,但是在实时性和功能安全等级上要远远优于LINUX 和QNX 系统。考虑到功能安全的等级严重影响系统的软件复杂度和开发成本。根据功能失效的影响将3 个可用的M7 核分配为ASILB 和ASIL D 等级,具体的功能分配见图3中的应用功能分配。

图3 软件系统架构
操作系统和驱动之上布置了AUTOSAR 基础软件和域控制器工作的必要软件组件。AUTOSAR 基础软件根据处理器内核架构的不同分别采用AUTOSAR ADAPTIVE 平台和AUTOSAR CLASSIC平台,必要软件组件包括电源管理,数据存储和核间通讯等。与常见的车载控制器不同,由于S32G274A芯片是异构架构,A53 核和M7 核的通讯没有办法通过操作系统的统一调度实现,需要设计一个核间通讯模块来保证整个控制器实现数据和功能的统一调度。S32G 有两种异构架构的核间通讯通道,一种是基于共享内存配置中断的通讯方式IPCF(NTERPLATFORM COMMUNICATION FRAMEWORK),一种是基于类似于以太网的SOCKET 通讯方式PFE(Packet Forwarding Engine),PFE 可以等效为是在芯片内部封装了一个SWITCH。两种通讯方式比较,IPCF 采用共享内存中断的效率必然好于PFE,但是由于共享内存使用的是S32G 芯片的SRAM,SRAM总量只有8MB,其中大部分被M7 核的应用占用,通过测试在本文中M7 核应用功能正常工作的情况下SRAM 最大可分配3MB 用于IPCF 使用,因而IPCF的处理能力非常有限。PFE 的数据处理能力非常强,在每包数据大小64 字节的压力测试环境下可以达到2Gbps 处理能力。核间通讯的路由表配置为实时性高且数据量不大的信号通过IPCF 传输方式,数据量较大的数据通过PFE。A53 核和M7 核两种操作系统中数据在系统内部的传递形式不一致,因此在核间通讯时需要实行统一的数据组包解包协议,在M7 核和A53 核分别设置相应核间通讯模块对数据进行序列化和反序列化。
对于应用层与下层通用基础软件和必要软件组件的接口差异性设计了专用软件中间件。这种架构通过专用中间件将通用组件与应用层隔离开,降低软件耦合度便于实现平台化开发,作为域控制器核心的SOA 中间件由于与功能耦合度较高因此布置在专用中间件层。
2.2 SOA 组件设计流程
域控制器做为整车的中央网关节点,是整车SOA 的核心。本文中的SOA 服务设计流程如图4。首先要列出需要实现服务化的业务列表,根据不同的功能设计相应服务,明确服务内容和角色,将设计好的服务简化为变量,并根据变量的用途进行数据类型分类,然后根据整车网络架构的部署选择对应的SOA 协议栈进行数据部署(将数据类型和协议栈数据属性对应)。上述过程完成后,需要将服务涉及的逻辑功能进行建模得到应用软件模块SWC,由于组合服务可能需要调用不止一个SWC 模块,需要将多个SWC 模块结合在一起,因此需要进行接口设计与映射,最后将服务应用与进程进行绑定,就实现了SOA 服务化设计。
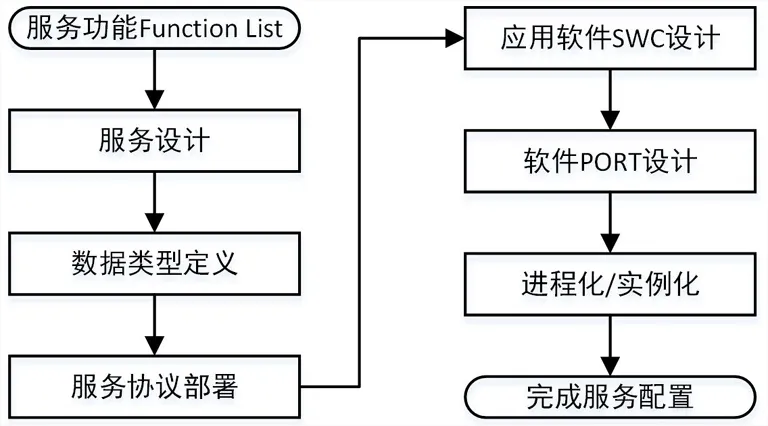
图4 SOA 组件设计流程
对上述的设计方法设计了验证台架,负载使用雨刮电机和前大灯,指令发布通过PC 和无线路由器下发给域控制器。SOA 协议栈采用车载领域主流的SOMEIP 协议,选取的SOMEIP 数据属性是method,method 绑定的应用分别是method ID 000a雨刮高速档运行1 分钟,method ID 000b 大灯点亮5分钟关闭5 分钟,验证流程如图5。

图5 验证流程示意图
根据图5 的验证构想搭建了验证台架,图6 是验证台架实物和Wireshark 数据解析截图。

图6 台架验证结果
3 结语
当前,车载控制器正面临硬件平台可拓展性低、开发周期长、成本难以控制等方面的难题。以S32G274A 高性能处理器为主处理器设计域控制器可以满足跨域融合的算力和通讯性能要求。实现车身、动力、网关等功能的整合实现硬件平台化开发。同时,软件架构的分层模块化和基于SOA 架构的车内通讯架构能大幅度提升平台的可拓展性和可移植性,具有广泛的应用前景。