复杂地形条件下多目标应急救援辅助决策系统的设计
2022-12-01罗勇军
谭 超,曾 泽,罗勇军
(陆军军医大学陆军卫勤训练基地军事医学地理学教研室,重庆 400038)
0 引言
山区战场环境相对复杂、作战人员高度集中,导致伤员大量发生[1],第一时间到达伤员位置展开医疗救治对于挽救伤员生命、降低部队伤残率和阵亡率、保证部队战斗意志持续高涨具有重要意义。目前,在高海拔山区作战,除伤员数量多以外,还具有伤情复杂和抢救难度大等特点[2],普通的战场搜救方法已不能满足高原高寒特殊战场的急救需求,如何构建高原复杂地形下多目标应急救援的最短路径及其辅助决策系统成为亟待解决的问题。
在战现场急救培训平台构建方面,杜文琼等[3]基于我军重要战略方向的地理环境,构建了高仿真战现场急救训练平台,具有模拟高原地形、地貌、地物、气候以及水文等功能。然而,该研究着重于三维虚拟化培训,并未涉及如何以最快速度和最短路径到达急救地点的问题。刘雅[4]提出了一种融合战场态势的路径规划方法,能为战场中车辆快速寻找战术机动提供最优路径。我军于2015年研究了一种战场伤员搜救系统,该系统的所有单兵信息终端和搜救信息终端分布在一定空间范围内,彼此之间共同形成战场无线自组网以发送呼救信息[5]。然而,以往的研究中并未提供快捷搜索路径和实现缩短救援时间。对于高原地区的搜救任务,尤其是徒步搜救工作,快速确定最短路径对于提高伤员救治率具有重要作用。
最短搜索路径作为路径规划领域要解决的重要问题之一,是应急救援辅助决策系统实现的关键[6-10]。其中,栅格数据和矢量数据均可作为路径规划的输入参数,由此分为2种不同类型的路径规划。基于矢量数据的最短路径规划是在已经存在实际路网的前提下,沿着具体的路线和节点找出最短路径,目前此算法已经较为成熟,被广泛应用于城市应急救援领域。针对多点救援规划,吴瑶[11]将遗传算法与线性规划法相结合,提出了起始点选择与车辆路径集成优化的方法,该方法是沿着现有矢量图中多个线段的组合进行最短路径规划[12]。然而,对于没有道路网的高海拔山区,其可达性极差,该方法并不适用,需要以地形高程为基础规划最佳路线。因此,基于栅格数据寻找目标点之间最短路径为复杂地形条件下多目标快速救援提供了解决方法。张鑫[13]基于栅格数据,找到复杂地形条件下两点之间的最短路径,解决了救援点和目标点之间的路径问题,但是无法解决救援点到多个目标点路径规划的问题。
因此,本研究以30 m数字高程模型(digital elevation model,DEM)栅格数据为基础,采用Dijkstra算法,实现在复杂地形、道路缺失的情况下,从出发点到多个应急救援目标点的最短路径规划,以及在三维系统中山区环境快速救援最短路径的可视化,并在此基础上构建应急救援辅助决策系统,为战场救援提供辅助决策。
1 应急救援辅助决策系统的设计及实现
1.1 应急救援辅助决策系统的组成
应急救援辅助决策系统的基础架构主要由基础设施层、数据支持层、应用服务层和前端交互层4个部分组成(如图1所示)。本系统基于浏览器/服务器(Browser/Server,B/S)架构,用户使用浏览器即可实现对应急救援场景的浏览和使用。同时,本系统采用模块化和微服务的设计思想,各功能相互独立,耦合性较低,保证了后续在进行功能扩展时能够以较高的效率和较低的工作量完成系统扩建工作。
1.1.1 基础设施层
基础设施层包括系统运行所必需的服务器、操作系统等软硬件资源,以及在此基础上虚拟出的容器、文件存储等资源,为数据支持层和应用服务层提供运行环境。其中,容器主要用于支持救援辅助决策方案的计算生成,文件存储用于支持高分卫星影像、矢量地图、三维地形数据和图片文字等静态资源数据。
1.1.2 数据支持层
数据支持层主要用于数据存储和数据检索,主要分为3类数据:第一类用于覆盖在地球表面的地理底图数据,包括高分卫星影像和矢量地图;第二类为三维地形数据;第三类为文字、图片等数据。
1.1.3 应用服务层
应用服务层主要包含遥感影像的切片服务、矢量数据服务和三维地形数据服务,还包含ArcGIS Server提供的最短路径规划地理处理(geoprocessing,GP)服务中的空间分析,为救援辅助决策方案提供计算服务支持。
1.1.4 前端交互层
前端交互层指运行在客户端的浏览器,用户通过浏览器输入网址实现对系统的访问。本系统前端采用超文本标记语言(hyper text markup language,HTML)、层叠样式表(cascading style sheets,CSS)、JavaScript、jQuery和Cesium等框架进行设计。其中,HTML、CSS用于设计系统的用户界面;JavaScript和jQuery用于实现界面展示和交互功能;Cesium用于完成大范围三维地理信息系统(geographic information system,GIS)场景的仿真和渲染。当用户端根据需求发出指令时,系统即可响应用户端的请求完成数据可视化、动态驱动以及管理等功能。
1.2 应急救援辅助决策系统的实现
多目标应急救援最短路径规划是应急救援辅助决策系统实现的关键。本研究基于DEM栅格数据,先寻找复杂地形条件下两点之间的最短路径,将起始点和救援点合并为一个数据集,通过计算起始点和救援点两两之间的距离和路径,为使用Dijkstra算法计算起始点到多个目标点之间的最短路径提供基础。最后计算出多目标应急救援的最短路径,并将路径结果输出。
1.2.1 数据来源
本研究用于路径规划分析的DEM栅格数据来源于地理空间数据云平台,下载地址为http://www.gscloud.cn/,空间分辨力为30 m。通过DEM可以计算坡度、坡向和起伏度等地形要素。随着DEM栅格数据来源的多样化,国内高分三号民用卫星地形图的精度可达1∶10 000,无人机机载激光雷达可绘制1∶1 000精度的地形图,可根据需要补充到应急救援辅助决策系统数据库中。
1.2.2 实现步骤
本研究基于ArcGIS系列产品实现多目标救援最短路径的规划,其流程图如图2所示,具体步骤如下:

图2 多目标应急救援最短路径规划流程图
(1)创建成本栅格。使用ArcMap计算目标区域的坡度,并对坡度进行重采样,最终生成成本栅格。映射关系通过多次实验得出,坡度为>0°~5°时,成本为1;坡度为>5°~10°时,成本为3;坡度为>10°~15°时,成本为5;坡度为>15°~20°时,成本为8;坡度为>20°~25°时,成本为12;坡度>25°时,成本为30。成本栅格是用于识别通过每个像元所需的成本。在山区复杂地形、无道路的条件下,最大的成本来源于坡度的起伏变化。因此本研究基于坡度数据,通过坡度重采样得出对应的成本栅格。但这并不是唯一可行的方案,也可以将地质分类信息、土地利用类型等对救援活动密切相关的数据加入到阻抗的设计中。本研究目前仅参考坡度数据,其他类型的数据可以后续展开研究。
(2)使用ArcPy将用户输入的起始点文件和救援点文件进行合并,合并过程中记录起始点的ID,便于后期通过Dijkstra算法找到起始点。
(3)使用ArcPy调用ArcMap的CostConnectivity工具包,将步骤(1)~(2)的结果作为输入参数,最终生成最小跨度树、相邻连接拓扑图(如图3所示)以及相邻连接二维表(如图4所示)。其中,每一条记录表示一段路径,字段“REGION1”表示该路径的起始点ID,“REGION2”表示该路径的救援点ID。

图3 多目标应急救援相邻连接拓扑图

图4 多目标应急救援相邻连接二维表
(4)采用Dijkstra算法找到相邻连接拓扑图中起始点到所有救援点的最短距离,由此求解起始点到所有救援点的最短路径。
(5)将起始点到所有救援点的路径片段合并成数据集,输出结果。
(6)使用ArcPy将上述步骤整合成GP工具,以用户输入参数为起始点和救援点,计算成本栅格数据,并输出结果路径。多目标应急救援最短路径规划结果如图5所示。系统将结果路径发布到ArcGIS Server中形成GP服务,用户即可在前端进行调用。

图5 多目标应急救援最短路径规划结果
2 应急救援辅助决策系统的功能
2.1 三维场景浏览
Cesium是一个基于JavaScript编写的使用Web-GL的地图引擎,其支持三维和二维的地图展示,能够提供逼真的外部战场环境,也可以进行交互式信息查询。利用Cesium开发应急救援辅助决策系统,并执行最新的HTML5标准,可以使系统不用安装任何插件就能在支持的浏览器上流畅运行,能够很好地满足动态数据在GIS图层上的呈现。三维场景浏览界面如图6所示。
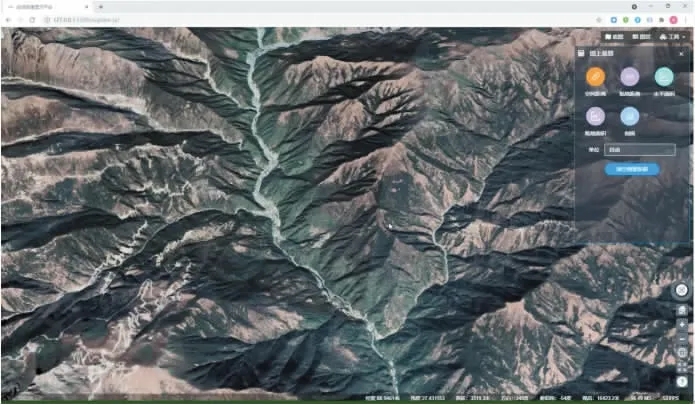
图6 三维场景浏览界面
2.2 多功能辅助标绘
本系统支持多功能辅助标绘功能,用于辅助解析战场救援态势,包括点、线、面以及文字的标绘。通过设置不同图标的点标注、不同颜色及粗细的线标注、不同颜色及形状的面标注,可以丰富当前救援态势查看方式,且标注的数据可以直接应用于救援决策分析报告,便于决策者了解整个战场救援环境。多功能辅助标绘界面如图7所示。
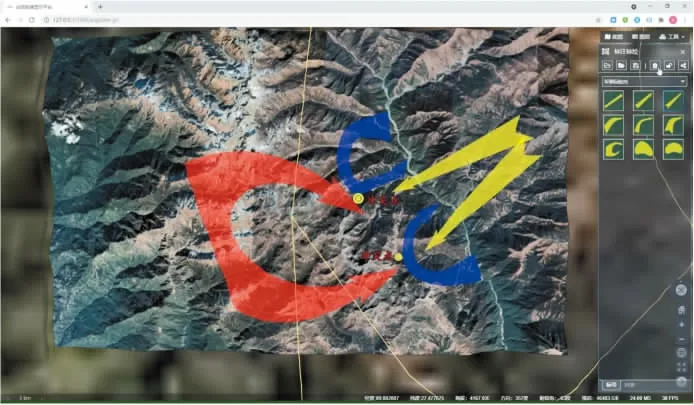
图7 多功能辅助标绘界面
2.3 多目标应急救援最短路径GP服务
本研究中的救援路径计算基于ArcGIS Server发布的自定义GP服务。GP服务是由ArcToolbox中的工具或者通过ModelBuilder、ArcPy等工具自定义创建的处理工具模块发布的,供前端工具调用以实现单点到多点的最短路径规划。本研究基于ArcPy开发了自定义GP服务,用户在前端自定义起始点和单/多个目标点(如图8所示),并将参数上传到服务器,GP服务通过计算将结果返回,最终呈现在系统的三维场景中(如图9所示)。
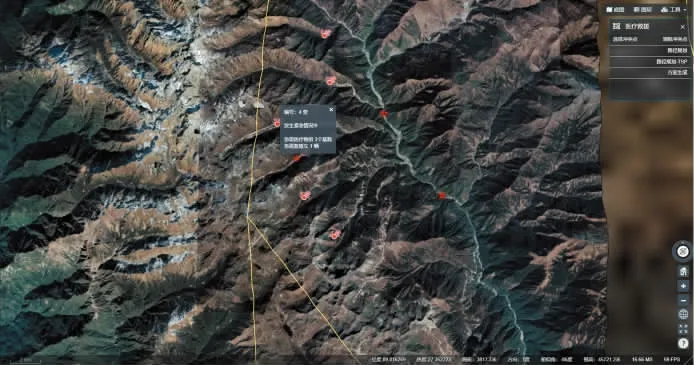
图8 自定义目标点(冲突点)界面

图9 救援路径动态生成结果
2.4 多目标应急救援决策分析报告
三维救援辅助决策功能主要实现事件接报、周边影响分析、周边资源分布分析、救援路径规划等。其中,救援路径规划主要通过调用GIS中的GP服务,将其中的路径规划整合到应急救援辅助决策系统中,从而实现多目标应急救援最短路径的规划。在应对突发情况时,将需救援的地点、人员以及所需物资自动导入系统,配合由计算生成的可视化路径,将决策者关注的信息自动导入到自定义模板中,快速辅助决策者制订医疗救援的最佳方案,可大大地提高救援人员决策的效率和准确性。多目标应急救援辅助决策分析报告示例如图10所示。

图10 多目标应急救援辅助决策分析报告示例
3 性能测试
本系统可以有效解决高原山区复杂地形无道路条件下的应急救援规划和资源调度问题。本研究对系统的6个功能和3个性能进行了测试,其中,6个功能主要包括基础平台支持二维/三维模式显示、数字地球的展现方式、基础的空间量算、态势标绘、动态生成救援路径、救援方案半自动生成;3个性能包括支持5个目标以上应急救援最短路径规划、屏幕分辨力自适应调整、DEM和影像叠加的三维显示。以下对性能测试介绍如下。
3.1 支持5个目标以上应急救援最短路径规划
分别对5、9和10个目标点数进行应急救援最短路径规划,测试其时间消耗。测试结果表明,本系统具有支持5个目标点以上的应急救援最短路径规划能力。其中,5个目标点的应急救援最短路径规划时间为6.49 s,9个目标点的应急救援最短路径规划时间为7.04 s,10个目标点的应急救援最短路径规划时间为11.49 s,均满足要求。
3.2 支持屏幕分辨力自适应调整
对本系统屏幕分辨力进行测试,测试结果表明其可支持1 920×1 080像素的屏幕分辨力,且可根据不同分辨力自适应调整。分辨力测试图如图11~12所示。

图11 分辨力测试图(1 600×900像素)

图12 分辨力测试图(1 920×1 080像素)
3.3 支持DEM和影像叠加的三维显示
对本系统是否支持DEM和影像叠加的三维显示进行测试,测试结果表明其可支持栅格影像和DEM叠加,并能实现三维显示效果,地形和高清影像叠加测试图如图13所示。

图13 地形和高清影像叠加测试图
综上,所有测试均能够正常响应操作指令,操作过程流畅无阻碍,满足指标要求。本系统可根据当前战场态势、伤员实时位置及所需救援物资,生成医疗救治机构到多个应急救援点的最短路径规划和最优资源调度辅助决策方案,并能三维可视化呈现,显著提高了救援人员决策的准确性、时效性和科学性。
4 结语
本研究从实际应用场景出发,在ArcGIS系列产品和Cesium三维数字地球的基础上,设计了多目标应急救援辅助决策系统,可用于在复杂地形、道路缺失的情况下,从起始点到多个应急救援目标点的方案辅助决策。本研究有较强的实际应用价值,为今后开展战场救援提供了技术参考。但本研究也存在一些不足,如成本栅格的生成方法有待进一步研究,由于其直接关系到距离路径的生成,下一步将考虑进一步优化成本栅格的生成方法,确保路径的生成科学、有效,提升辅助决策的准确性和科学性。
