耙吸挖泥船环保阀全自动控制技术研究与应用
2022-11-30周昭旭潘永军何彦行张晴波衣凡
周昭旭,潘永军,何彦行,张晴波,衣凡
(中交疏浚技术装备国家工程研究中心有限公司,上海 200082)
0 引言
耙吸挖泥船挖泥时通过装舱溢流来增加装载量是关键施工工艺,而溢流过程中由于溢流混合物携带了大量空气,促使泥沙颗粒进入水体后不能快速沉降而处于长时间悬浮状态,造成悬浮颗粒污染。通过在溢流筒内安装环保阀装置,持续调节阀体开度,进而控制溢流液面落差,使溢流筒保持一定的浸没高度,减少溢流混合物气泡含量,可有效降低泥沙颗粒悬浮时间,减少悬浮物扩散污染,提高整船施工的环保性[1-3]。
装舱溢流过程中如何调节环保阀开度使溢流环保效果最佳是挖泥船环保疏浚的关键技术。操作人员需要频繁调节环保阀,同时操作其它疏浚机具,势必出现工作量大、注意力不集中,影响施工效率的同时降低施工标准,严重时造成安全事故[4-7]。
针对现阶段环保阀人工操作的局限性,本文在分析环保阀控制需求的基础上,综合考虑耙吸船施工工艺和疏浚设备工作特性,研究环保阀全自动控制技术,设计环保阀自动化与智能化控制策略,研发环保阀全自动控制器。
1 环保阀装置
溢流筒中的环保阀由耐磨阀板、支架结构、中间连杆、长连杆和液压油缸以及线缆架组成,见图1。

图1 环保阀装置Fig.1 Green valve equipment
环保阀对溢流的关键作用是减少气泡的进入。通过安装可调节开度的环保阀装置,增加溢流混合物的流动阻力,降低溢流流速,减少溢流筒入口处与大气压之间的压力差,同时增加溢流筒上方的水位,使溢流筒保持一定的浸没高度,直接降低溢流混合物的落差高度,减少与空气的接触时间,筒底排出的溢流混合物中气泡的含量也相应减少,进而减少船尾泥沙颗粒悬浮扩散,起到环保疏浚的作用[8]。
2 控制需求与技术路线
耙吸挖泥船挖泥时由耙头挖掘泥沙,经泥泵作用通过管路进入泥舱,当舱内液位上升至溢流筒高度时发生溢流,操作人员需要持续观察溢流情况来动态调节环保阀开度,使溢流效果达到施工环保标准,同时还要兼顾操作其它疏浚设备,容易出现疲劳分心,影响施工安全。
针对环保阀人工操作的局限性,设计环保阀全自动控制策略,从环保阀主流程控制逻辑、溢流过程自动控制与智能寻优方面,开展环保阀自动化与智能化控制技术的研究,实现环保阀全自动无人化调控,达到最佳环保溢流效果。
3 环保阀全自动控制器设计
环保阀全自动控制器的控制对象是环保阀开度,装舱溢流过程中,通过自动调节环保阀开度使溢流筒保持合适的浸没高度,进而减少溢流液面落差是关键控制目标。
3.1 主流程控制
3.1.1 参数配置
耙吸挖泥船施工作业受环境工况和疏浚土质影响因素大,因此挖泥前需要进行参数设置,见图2。

图2 环保阀全自动控制器参数设置Fig.2 Parameter setting of fully automatic green valve controller
1)模式选择
控制器配备了2种模式:自动模式和智能模式。自动模式中溢流筒浸没高度的控制目标值由人工设定,控制器调节环保阀开度使溢流筒的实际浸没高度匹配设定目标值。智能模式中控制器根据实际装舱溢流效果对环保阀开度进行动态寻优调节。
2)目标土方量
当挖泥土方量大于设定目标值时,环保阀自动关闭,防止泥沙流失影响装舱产量。
3)最大吃水
当船体平均吃水超过最大吃水设定值时,环保阀自动全开,控制器报警提示。
3.1.2 流程总体设计
1个挖泥周期中环保阀全自动控制器的主流程控制逻辑见图3。
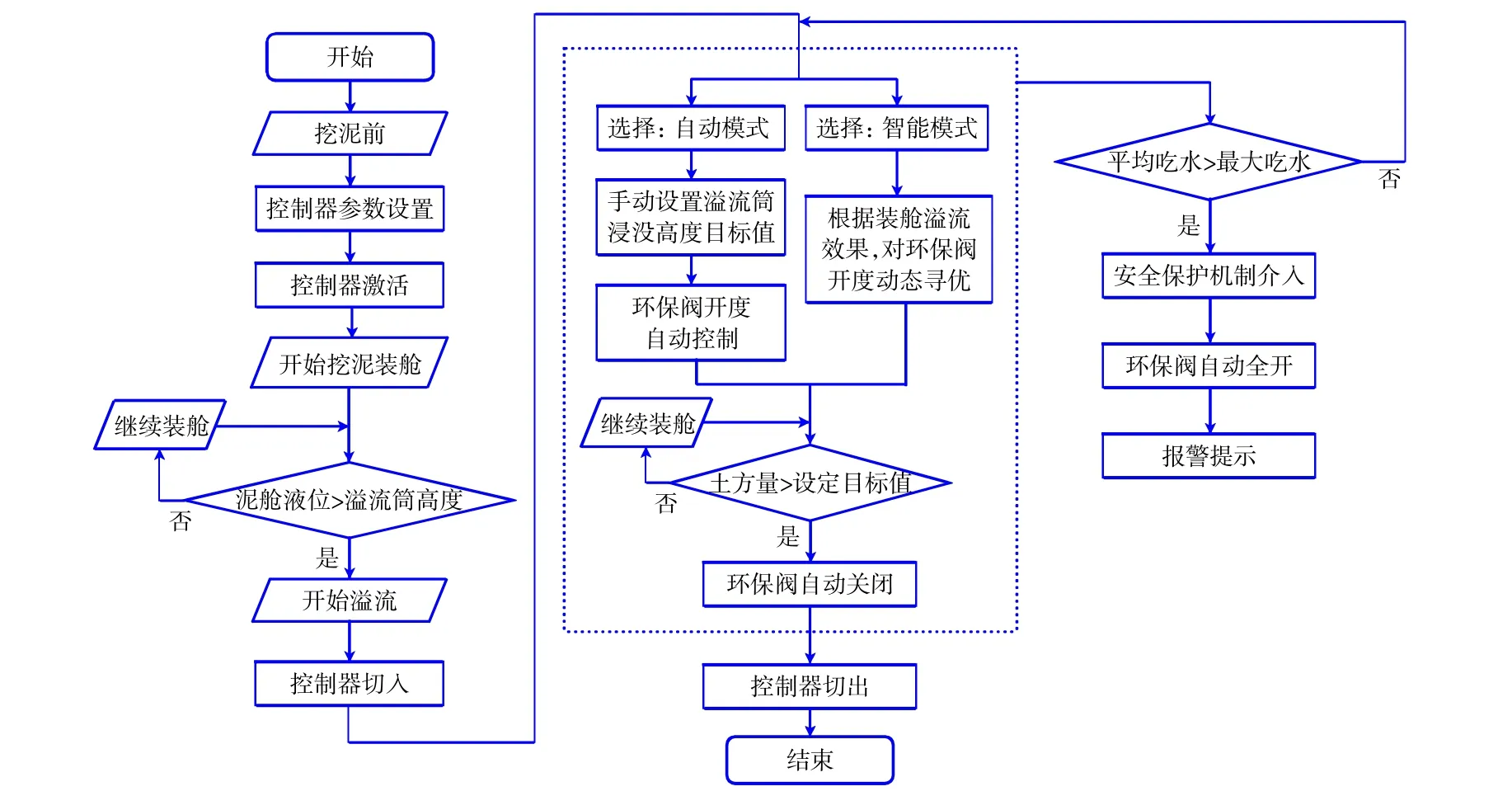
图3 环保阀全自动控制器主流程逻辑Fig.3 Main process logic of fully automatic green valve controller
挖泥前对环保阀全自动控制器参数进行设置,通过疏浚监控系统的人机界面激活控制器。挖泥时当泥舱液位高于溢流筒时开始溢流,控制器开始切入。
控制器根据配置模式对环保阀开度自动调节。自动模式中控制器通过控制阀体开度将溢流筒实际浸没高度控制在手动设定的目标值附近。智能模式时控制器根据当前装舱溢流情况对环保阀开度进行动态寻优控制,使溢流环保效果最佳。
当挖泥土方量大于设定目标土方量时,控制器自动关闭环保阀并切出,减少溢流损失并维持当前产量。装舱溢流过程中若船体平均吃水超过最大吃水设定值,控制器的安全保护机制触发,环保阀自动全开并报警提示。
3.2 自动控制
控制器的电气控制对象是电磁阀的动作,自动模式中当溢流筒实际浸没高度与设定目标值偏差较大时,采用控制环保阀开、关液压油缸电磁阀得电的方式实现开度自主调控,动作表见表1。

表1 环保阀全自动控制器动作表Table 1 Action table of fully automatic green valve controller
其中ΔH为溢流筒浸没高度实际值,通过液位雷达和溢流筒行程传感器信号计算;ΔHs为溢流筒浸没高度的目标控制值;D为控制死区,根据船型泥舱结构设置为固定值。结合环保阀的控制原理,采用常规PID控制策略的方法实现自动控制,控制架构如图4所示。

图4 环保阀自动控制架构图Fig.4 Structure diagram of automatic green valve controller
PID控制模块的输入为溢流筒浸没高度目标值、控制死区,kp、ki、kd为PID修正参数,反馈值为溢流筒的实际浸没高度,输出量为环保阀液压油缸的电磁阀指令。
3.3 智能寻优控制
实际应用中发现,自动模式能够根据溢流筒浸没高度的实际值和目标值对环保阀开度进行自主调控,但频繁出现环保阀全开、全关等大幅度开度调节的问题,导致液压油缸频繁动作,长期使用会降低液压系统的使用寿命,同时溢流筒实际浸没高度存在较大的振荡性,溢流环保效果不明显。这是由于挖泥装舱具有可变性,疏浚土质和工况环境是装舱溢流过程的关键影响因子,采用自动模式的控制器无法充分感知装舱溢流参数,对工况的适应能力差。
针对该问题,设计装舱溢流智能感知模块,充分感知预测装舱溢流的工作状态。在此基础上引入智能寻优算法,分析研究环保阀智能寻优控制策略,最终实现阀体开度的动态寻优调节。
滑动聚束方式下波束在地面照射区域具有一定移动速度vf,因此在增加定点聚束每个波位脉冲驻留数,打破波束扫描速度与飞机平台速度的平衡,进而使得波束在地面照射区域具有一定的移动速度。这里引进滑动系数k(k≥1),滑动聚束方式下,波位驻留脉数N0=k·R·sin(θv)/va·PRF,通过设置k的取值,调节波束在地面的滑动速度。
3.3.1智能感知模块
装舱溢流智能感知模块不仅对疏浚监控系统现有手段采集的信号进行监控,还能感知溢流损失等传感器无法监测的数据,同时预测装舱溢流状态。感知模块架构见图5。
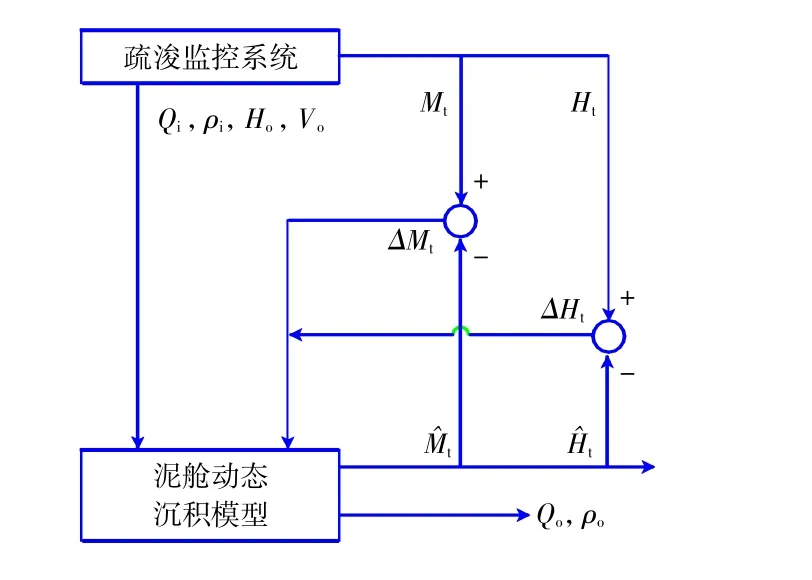
图5 装舱溢流智能感知模块架构Fig.5 Structure diagram of intellisense for loading and overflow process
泥舱动态沉积模型是智能感知模块的关键数学模型,模型的输入为进舱流量Qi、进舱密度ρi、溢流筒高度Ho、环保阀实时开度Vo、当前装载量Mt和液位Ht,实时计算溢流混合物流量Qo、溢流密度ρo,在此基础上输出装载量M^t和液位H^t的预测值。
泥舱动态沉积模型的建模原理是基于泥舱装载量、舱容量和舱内液面高度建立基本平衡方程,根据泥舱和溢流筒的结构按照挖泥工艺分阶段计算溢流流量,通过引入疏浚土质参数来构建泥沙沉降模型,进一步构建水层模型来模拟舱内泥浆混合物的密度分布情况,计算溢流混合物密度,同时对后续装载量和液位进行预测。泥舱动态沉积模型的详细建模原理和方法可参考相关文献[9-11]。
3.3.2智能寻优算法
针对耙吸挖泥船施工过程时可变性特点,采用自主适应能力强、算法简易、配置参数少的粒子群寻优算法[12-13],对环保阀开度进行动态寻优。粒子群算法寻优步骤见图6。
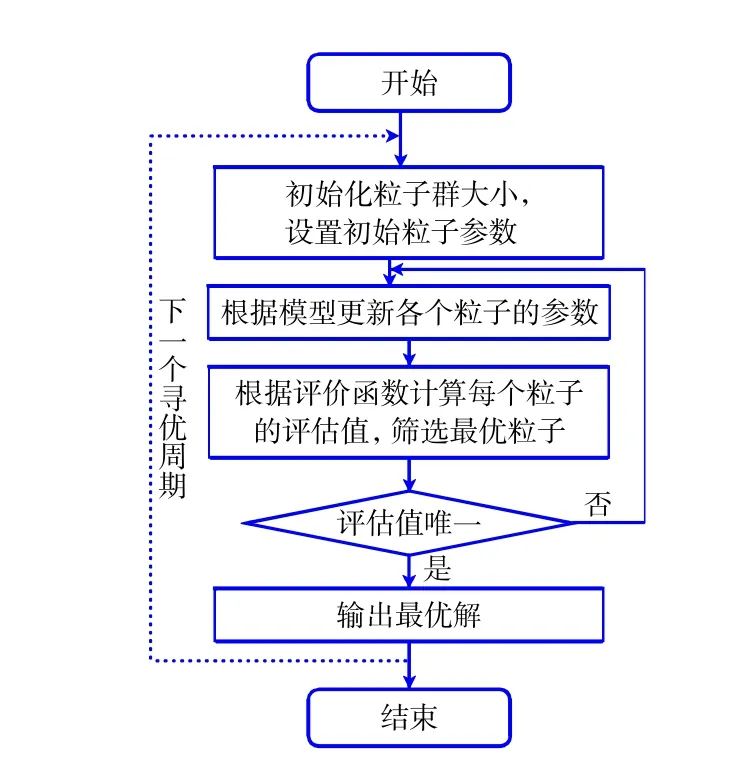
图6 粒子群寻优算法流程图Fig.6 Flow chart of particle swarm optimization algorithm
针对寻优算法在工程应用的时效性问题,设置粒子群体的数量为100个,由于装舱溢流是连续性过程,因此每次寻优的迭代周期设置为30 s。每个迭代周期内粒子的初始参数为当前泥舱液位、装载量、溢流筒高度,所有粒子依次对环保阀开度从0至100%进行模拟。
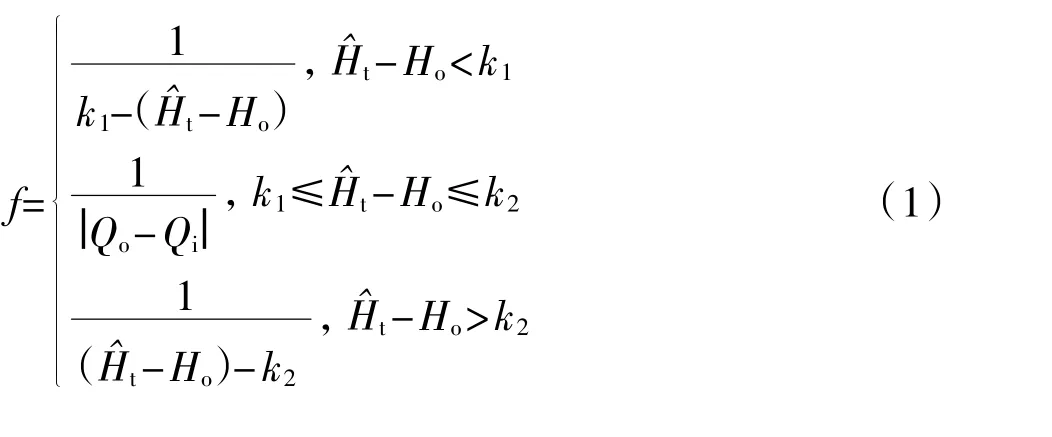
粒子群体中每个粒子根据泥舱动态沉积模型,对装舱溢流过程进行推演,计算并预测该周期内的相关溢流参数,根据评价函数(式(1))计算每个粒子的评估值:
4 实船试验与应用
环保阀全自动控制器已部署于“航浚3011”和“航浚4019”轮,并成功应用于黄骅港、日照等施工现场。
实船试验时在相似工况条件下分别对环保阀全自动控制器的自动模式和智能模式进行测试,试验工况参数见表2。
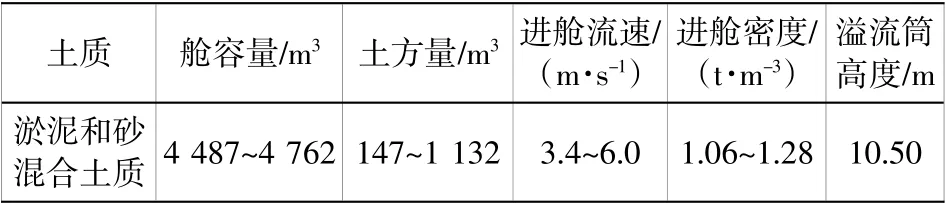
表2 实船试验工况(开始溢流后的30 min内)Table 2 Actual testing conditions(within 30 min of starting to overflow)
自动模式中手动设定溢流筒浸没高度为0.5 m,控制死区设置0.05 m;智能模式中评价参数k1、k2分别设置为0.2 m和0.5 m。由于溢流环保效果无法通过现有传感器信号进行数字化标识,因此实船试验时综合分析环保阀控制开度和溢流筒实际浸没高度来对2种运行模式的控制效果进行评估。
图7、图8分别反映了溢流开始后的30 min内,控制器2种模式工作时溢流筒浸没高度和环保阀开度的实际控制效果。2种模式均能实现环保阀开度的自动调节,控制溢流落差减少溢流混合物的气泡含量,从而达到环保溢流的效果。当环保阀逐渐闭合时,溢流混合物流量小于进舱流量,使溢流筒保持一定的浸没高度;当浸没高度上升到一定值时逐渐开启环保阀,防止船体平均吃水大于最大吃水设定值,起到安全保护的作用。
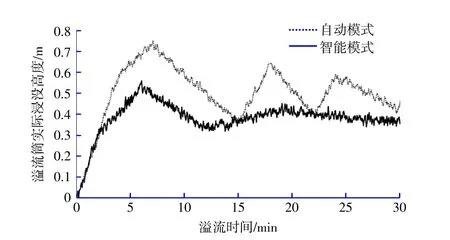
图7 环保阀全自动控制器的溢流筒浸没高度控制效果Fig.7 Control effect of overflow cylinder immersion height of fully automatic green valve controller
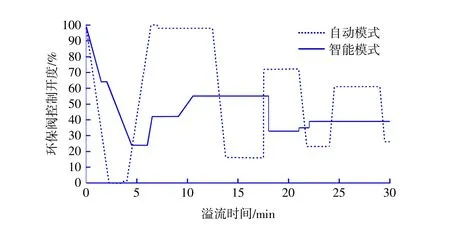
图8 环保阀全自动控制器的环保阀开度控制效果Fig.8 Control effect of green valve opening degree of fully automatic green valve controller
对装舱溢流过程的智能感知与自主预测,采用智能模式的控制器通过调节环保阀开度使溢流混合物流量控制在进舱流量值附近,使溢流筒全程保持相对稳定的浸没高度,控制效果更加平稳,减少环保阀调控的幅度,在保证环保溢流效果的基础上对环保阀的调控更加平滑,有效提升了控制效率,提高了设备使用寿命。
5 结语
通过对环保阀全自动控制需求的分析,本文梳理了环保阀全自动主流程控制逻辑,根据工程应用需求分别设计了环保阀自动控制与智能控制策略,实现了装舱溢流过程中环保阀开度的安全稳定与动态寻优控制。实船应用表明,该技术控制效果稳定可靠,能有效降低劳动力,提高环保溢流效果,具备施工工况高度自适应与自学习的特征,可快速推广应用至其它耙吸挖泥船。