矿井提升机变频控制系统优化设计*
2022-11-28寇斌
寇 斌
(山西西山煤电贸易有限责任公司,山西 太原 030053)
0 引 言
矿井提升机是煤矿重要的运转设备之一,负责矿井上、下人员,物料和煤炭的运输工作,关系到整个煤矿的生产安全,是煤矿生产的关键设备之一。 因此,结合当前先进控制技术,设计具备动态调速功能的矿井提升机变频控制系统成为提升矿井提升机工作效率和安全性的重要目标。
现有矿井提升机存在耗电量高、调速性能有限、安全性差的问题,对提升机高效运转、矿井安全生产带来许多不利和困难。 智能变频控制技术的应用,为矿井提升机的适应性调速、节能降耗、安全生产带来便利,能够充分应用智能变频控制技术达到矿井提升机安全、节能、高效运行的目的。
笔者基于智能变频控制技术设计的矿井提升机变频控制系统优化方案,重点对矿井提升系统、提升机变频控制系统硬件方案、软件方案进行设计阐述,通过系统测试验证上述功能的适用性和正确性,实现矿井提升机控制系统智能化、信息化的运行目标,对提升矿井提升机井下安全作业系数和作业效率具有重要意义。
1 矿井提升系统分析
矿井提升系统结构框图见图1 所示,其中主轴装置用于固定滚筒,可承受机械旋转部分的径向和轴向负荷,同时可承受危险情况的特殊负荷值;可缠绕钢丝绳控制罐笼上提或者下放,同时可调节钢丝绳的长度[1]。
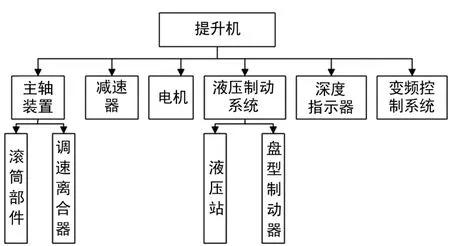
图1 矿井提升系统结构框图
减速器与主轴相连,用于降低或增加电机的输出转速,并可以将其调节至滚筒所需工作转速。 电机为交流绕线式感应电机,通过电机旋转带动滚筒旋转,进而达到罐笼上提或者下放的目的。 液压制动系统用于控制提升机可靠停车制动和安全制动,同时可实现参数速度控制、钢丝绳长度调节。 深度指示器用于明显指示罐笼的运行位置,接近上下井口时发出减速信号,发生故障时切断安全回路。 变频控制系统用于控制矿井提升机的运行,是矿井提升机的核心系统[2]。
2 提升机变频控制方案设计
矿井提升机变频控制方案设计原理见图2 所示,其由PLC 控制系统、低压配电系统、变频调速系统、操作台控制系统、能耗制动系统以及上位机监控系统组成[3]。

图2 矿井提升机变频控制方案设计原理
3 硬件设计
矿井提升机变频控制系统优化方案硬件设计主要包括控制器、变频器、检测传感器等。其中控制系统采用双线制PLC 控制系统,选用西门子313C-2DP PLC 控制器两个,各自附带16DI/DO;根据提升机变频控制方案设计要求,扩展32 DI SM321 模块4 个,16 DO SM322 模块4 个,8 AI SM331 模块2 个,4 AO SM332 模块2 个,5A PS307 电源2 个。 表1 为根据提升机变频控制方案设计原理,对PLC 控制系统的地址进行I/O 点分配的统计表。
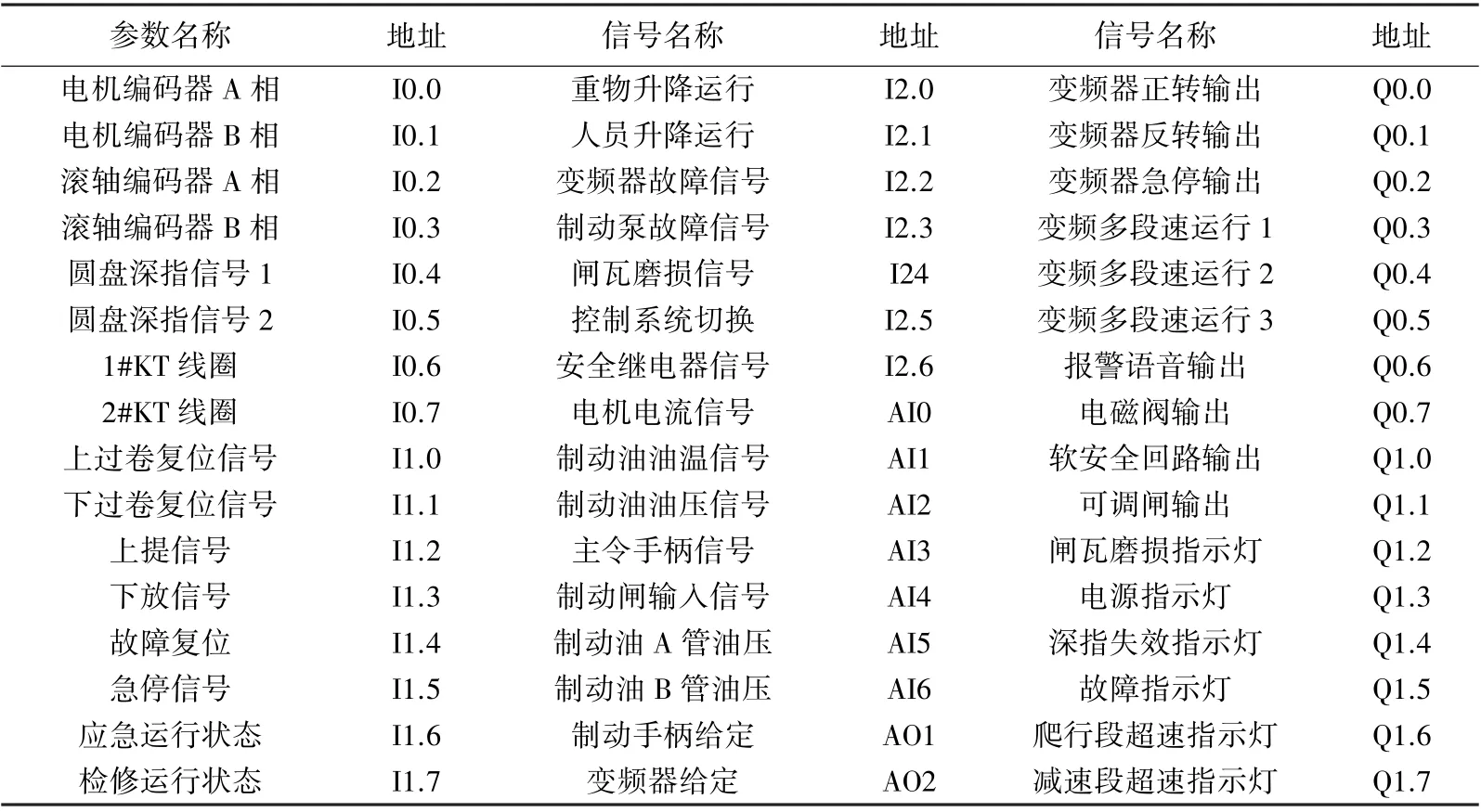
表1 矿井提升机变频控制系统PLC 地址分配统计
根据矿用提升机负载性质、变化规律,计算变频器的容量、过载能力以及起动能力,选用的变频器型号为ACS800-07-0550-7,采用直接转矩控制模式[4]。 闸磨损检测行程传感器安装于每一组(共四组)闸边,为LXK3-20S/L 碰头式行程开关,碰头顶住闸皮时,输出常闭信号;当闸瓦磨损时,输出常开信号,同时切换安全回路,保证提升机安全运行。 松绳检测行程传感器安装于钢丝绳两端,为LEX-3-001摇臂式行程开关[5]。 当提升机钢丝绳发生松绳时,钢丝绳会压倒行程开关,断开安全回路,迫使提升机无法运行。 罐笼到位检测行程传感器用于检测提升机的运行规律和速度曲线,利用磁敏开关和磁钢的吸合作用达到确定罐笼位置的目的。 选用罐笼到位检测行程传感器的型号为BEX-5-02,防爆等级IP55。圆盘深度指示检测开关安装于提升机的上下过卷以及终端,利用霍尔效应确定罐笼的位置。 制动油压检测传感器安装于液压站出管的A 管、B 管上,可检测0~10 MPa 压力,输出为4~20 mA 电流信号[6]。
4 软件设计
矿井提升机变频控制系统优化方案软件设计基于STEP7、采用功能块编程方式实现。 根据提升机变频控制方案设计以及硬件设计原理,软件流程以及模块划分见图3 所示。
为保证提升机运行过程平稳、安全、可靠,采用带加速度变化限制的速度给定模式,由软件实现提升运行速度曲线的S 化,产生S 型速度给定曲线,保证提升机在加速起动段、减速制动段产生期望运行曲线[7]。
5 试验分析
5.1 试验参数
矿井提升机变频控制系统试验时选用的提升机主要参数见表2 所列,额定电压为AC380V,额定电流为320 A,额定功率为160 kW,电机转速为742 r/min。

表2 提升机主要参数
试验前,需对变频器的主要参数进行设置,详细参数设置值以及物理意义见表3 所列,将额定电压、欸顶电流、电机转速设置为与提升机参数一致。

表3 变频器主要参数设定
5.2 试验过程
通电前完成系统硬件连线检查,在确保安全的情况下通电。 在完成PLC 控制系统输入、输出逻辑调试、整体调试、系统保护调试、操作台监控调试后,重点完成手动控制、自动控制模式下的提升机加速过程、等速过程、减速过程试验[8]。
加速过程:司机收到开车信号后,先推工作闸,再推主令,绞车开始运行后,将主令手柄慢慢推位或推至极限位置[9]。
等速过程:此时工作闸比例电流在显示屏上显示3.7 mA 左右,当显示屏上速度显示为最大值3.2 m/s时,转矩输出、速度输出趋于平稳。
减速过程:减速点到后,有相应的语言报警和警铃声,提升速度逐渐降低,到位后自动停车。
5.3 试验分析
试验过程中,连接示波器并实时采集提升机在加速、等速、减速过程中的速度曲线,如图4 所示,其中1 为提升机速度响应曲线,2 为速度给定曲线[10]。 由图4 可知,应用变频控制系统优化方案后,该提升机加、减速平稳,停车时能实现电气和液压制动,能实现高性能的频率控制、转速控制和转矩控制,大大改善了提升机工作性能。
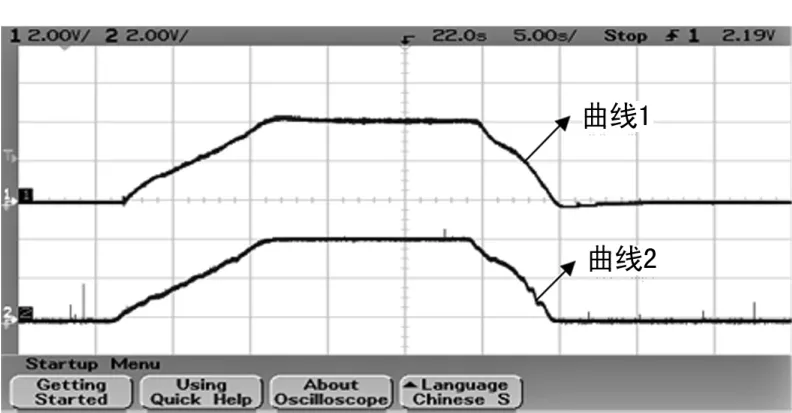
图4 手动控制全过程速度响应曲线
6 结 论
以矿井提升机为研究对象,重点介绍了硬件、软件设计思路和方法,基于双PLC 控制系统,融合变频控制技术、传感器技术对原矿井提升机控制系统进行优化并完成试验分析。
(1) 优化后的矿井提升机控制系统,在满足提升机安全、稳定运行的前提下,实现了加速、等速、减速过程的平稳运行,改善了提升机的工作性能。
(2) 经试验分析验证,优化后的矿井提升机控制系统满足设计要求,提升了矿井提升机的智能化水平,有助于提高提升机井下作业安全系数和作业效率。
