面向模块化机械套件的伺服系统设计
2022-11-24张盛朱志豪
张盛,朱志豪
上海工程技术大学,上海,201620
0 引言
伺服驱动系统是自动控制系统的一个子集,用来调控被控对象的转角或位移,确保输入的实时指令可以在被控对象上自动地、连续地、精确地执行。自动控制系统可通过输入的信号来调整、改变物体的位置、方位、状态等输出被控量,依靠脉冲来定位,在收到脉冲后,控制系统根据对脉冲的单位设定值来完成位置的变化或者速度的增减幅度,从而实现位移以及速度变换,以负反馈闭环控制系统为主要工作状态,在特定情况下也使用开环控制来确保其功能的实现。
伺服系统是动态跟踪系统,所以达到的平衡也是动态平衡。其原理是基于开环控制的AC/DC 电机进行闭环反馈PID调谐控制,通过旋转编码器、旋转变压器等将速度和位置信号发送回驱动器,外加内部驱动控制,电流闭环。这三个闭环设置,大大提高了电机输出跟随设定值的精度和响应时间特性[1]。
1 伺服驱动系统的功能及原理
控制伺服系统机械元件运行的电机称为伺服电机,属于微型电机的一类,在自动控制装置中用作执行元件,原理结构如图1所示。伺服驱动系统组成部分可分为以下几项:(1)指令部分:动作指令信号的输出装置。(2)驱动部分:接收指令部分的输出,并驱动执行机构动作的装置。(3)反馈部分:检测执行结构或者负载状态的装置。(4)执行机构:接收驱动部分的输出信号产生的角速度、位置、线速度、转矩等状态。
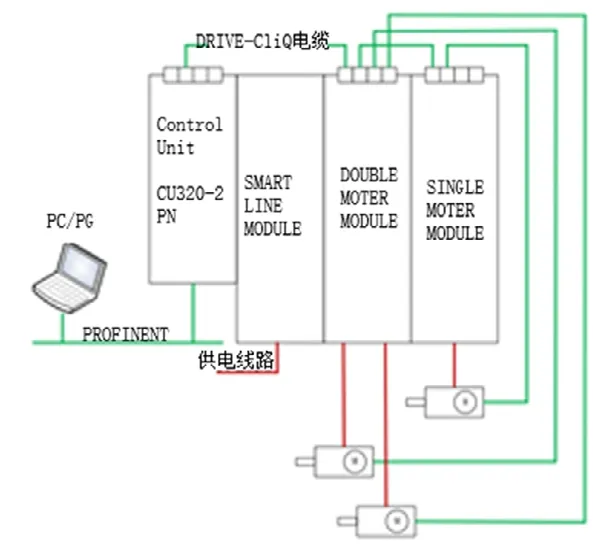
图1 模块化机械套件系统构成
伺服控制系统有三类控制模式:速度控制方式、转矩控制方式和位置控制方式。速度控制和转矩控制都是用电子信号模拟量来控制的,位置控制是通过激发脉冲来控制。伺服驱动系统上存在着机械装置,电信号可以通过机械装置传递到各个元件,从而可以带着轮子、齿轮或者皮带进行转动。伺服驱动系统里含有控制板,控制板里有各种程序,它的面板上有各种接口,如CAN总线接口、RS485接口及脉冲输入输出等。功率板上大都是元器件,它可将220V的电压转换成控制板和驱动板所需电压。其次控制板上的整流桥将电流整流后通过控制板给IGBT发布指令,然后用PWM控制这个电机进行转动。因此伺服系统可以将接收到的电信号转换成电机轴上的角位移或角速度输出,来达到指令的要求。
随着工业制造的飞速发展,设备不断更新,博途 TIA portal V15 和 SINAMICS S120 都得到了广泛的使用,其中博途 TIA portal V15 是全集成自动化实现的工程平台,实现了Step 7、WinCC软件等功能,能将全部自动化组态设计工具完美地整合在一个统一的开发环境中,并实现了硬件可视化。而SINAMICS S120是集伺服控制、矢量控制、V/F 控制为一体的多轴驱动系统,具有模块化的设计。各模块间通过高速驱动接口DRIVECLIQ相互连接。所以本文将采用博途 TIA portal V15 和 SINAMICS S120 组态关联的方式研究伺服电机性能,实现伺服电机的相关测试[1]。
2 SINAMICS S120的应用
SINAMICS S120伺服驱动器控制系统模块是一套集伺服V/F、矢量伺服驱动控制单元模块于一体的系统模块。其模块化的设计,提供了更高性能及可靠稳定的单轴驱动器系统和高性能双轴伺服马达驱动。从某种意义上讲,在SINAMICS S120中控制单元CU320起着类似人体大脑的作用,它类似是一个驱动整个系统运动的机械大脑,整个机械驱动的系统运动中涉及的其他所有系统模块也都需要由它来加以控制指挥和协调,来自不同轴上的电流环、速度环以及位置环同时也要由它来实现控制,并且满足在同一系统环境中控制单元上任何一根轴能够被读写的速度数据均能被控制单元上的所有其他轴同时读取,即允许同一块芯片(如CU320)所控制下的系统各轴之间仍能实时相互地交换速度数据,这一重要特征也被广泛用作于多根轴之间进行一种简单快速的系统速度同步[2]。
我们通过切纸机进行模拟,通过调整牵引辊和横切刀的同步运转速度,可调整纸张的切长长度。图2-图4是SINAMICS S120控制电机(切纸刀)的程序样例。

图2 大盘电机PLC流程图1

图3 大盘电机PLC流程图2
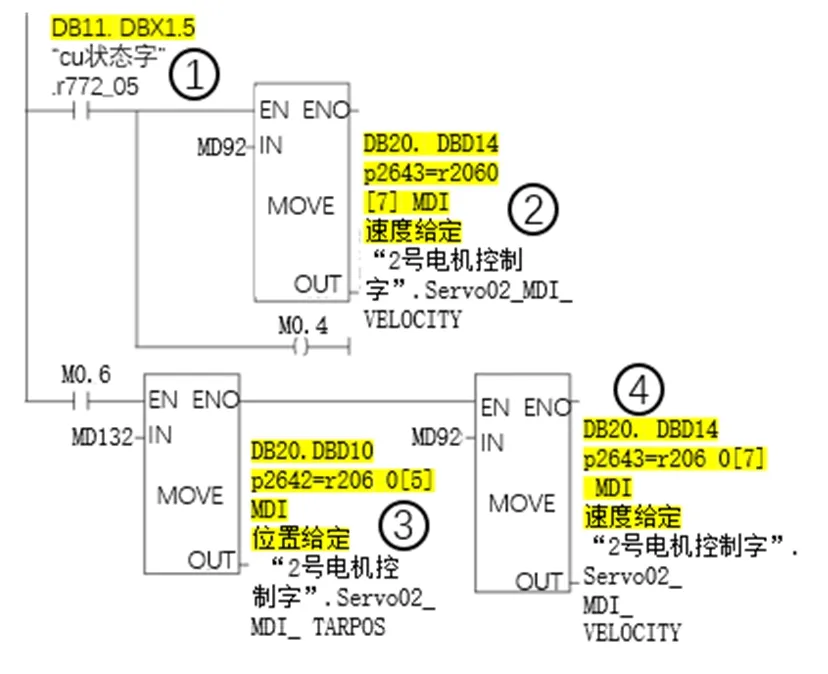
图4 大盘电机PLC流程图3
3 西门子报文
报文是一个网络结构,是一种计算机语言。它的形式多变,不同的形式传递不同的信息。当站点发送报文时,需要附加目的地址。事实上,报文的传输是可以分成多个节点的。即报文可以先发送到其他非目的地的节点,其他节点收到报文后会检查整个报文是否有问题,如果报文没有问题,就可以暂存整个报文,再利用路由信息找出下一个地址并传送,最后转送到目的地。因此,在使用SINAMICS S120时报文起到一个传输、翻译的作用[3]。实际上,报文的选择则是比较宽泛的。SINAMICS S120一般位置控制不仅支持西门子999报文同时也支持西门子111报文。
自由报文999是用户自由发挥、自由度空间最大的一种报文形式。而且,这种报文的允许通讯字数、数据数目也是最多的。它的整个通讯结构、通讯定义都可以由用户来定义。固定报文111的通讯定义及结构已经完全被定死了,是一种已经固定了的模式,用户不可能改变。通讯字数、数据信息已经完全固定。我们小组在自己编程的过程中则是选择了更为自由的999报文。如图5所示:
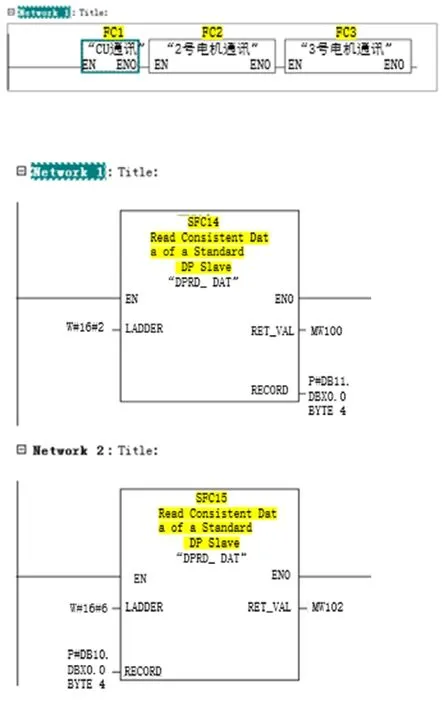
图5 报文通讯构架
4 触摸屏
触摸屏采用博途 TIA portal V15。博途系列软件通过将程序文件的编写过程和组态的画面过程集成在一起,使原有复杂程序的硬件注释也变得完整清晰。实际应用也说明了博途 TIA portal V15能快速进行相应程序的MODBUS通信处理,可大幅度减少相应程序文件的实际编写工作量,且代码直观简单易懂。现场操作维护时工作人员如发现有任何问题,可通过电话、微信等通信方式即时处理。该测试过程中涉及的主要是程序界面。因此,主程序设置中便不再需要用户编写管脚参数来设置模块的数据通信程序,且MODBUS通信协议的数据地址也可通过直接输入在主程序模块中来设置,大幅度减少了模块数据地址传输与程序脚本编写之间的复杂工作量,现场安装易实现调试,节省硬件调试设计人员大量的准备时间,可使调试设备尽早完成投入使用。
操作上首先可以新建SIMATIC面板,在此基础上找到对应的设备地址来连接相应PLC。设置不同功能界面、点动、回零、定位、同步,添加相关的按钮设置数据类型附加大小轮盘速度。对于速度显示框添加输入/输出属性。对按钮添加时间,以此来给按钮赋值使其具有特定的功能,亦可给它添加不同外观,按下放开时具有不同的颜色增加辨识度。在测试启动前可直接采用MODSCAN32接口来进行数据传输测试和数据模拟测试,在传输模拟测试的模块连接中首先应详细设置和确认好博途V15的硬件、CP341模块的板卡地址、MODBUS地址的起始点长度和数据长度。并通过在模块连接上设置,确认好博途V15的硬件模块连接所需对应连接的端口地址、波特率和传输测试模式等,设置软件中都采用标准的RTU传输模拟测试用协议。我们要保证每一条合格的RS485模拟通信电缆可通过另一个标准MODBUS模拟通信器连接到模拟测试用的计算机总线上。在完成了以上的所有设置及过程调试后,所有需要实时监视的数据均可在模拟通信的软件和应用平台中出现,实现线上监视。使用博途V15将伺服电机系统装置的全部控制信息送入中央控制器,不但大大提高了工程设计和编程人员的效率和准确度,同时还促进了中心控制器的信息对接,同时也给日后的应用维修和故障管理带来了便利[4]。
5 结语
在面向模块化机械套件的伺服系统的设计时,我们对博途TIA portal V15和SINAMICS S120等进行了研究。可使用西门子111报文(固定报文)或999报文(自由报文)将自己的想法编译传输至伺服电机。在此基础之上利用博途TIA portal V15将伺服电机系统装置的全部控制信息送入中央控制器。可以SINAMICS S120电机为主体来调试伺服电机性能,实现伺服电机的相关测试。
