汽车五连杆后悬架机械运动分析及DMU仿真
2022-11-23贾威振马祖国陈洪正
贾威振,马祖国,陈洪正,于 江
汽车五连杆后悬架机械运动分析及DMU仿真
贾威振1,马祖国2,陈洪正2,于 江2
(1.宁波极氪智能科技有限公司 杭州分公司,浙江 杭州 310051;2.极氪汽车(宁波杭州湾新区)有限公司,浙江 宁波 315336)
文章介绍了汽车底盘五连杆后悬架的结构、机械运动原理、悬架运动建模和电子样机(DMU)模型应用,从理论角度分析汽车五连杆后悬架的机械运动原理、计算构件数量、计算运动副数量、计算空间自由度。研究了CATIA DMU运动学建模过程,包括输入参数、创建零件、创建约束、创建驱动仿真,并用悬架DMU模型解决汽车底盘设计的实际问题,包括校核各运动件间隙预防零件碰撞干涉,制作轮胎运动包络支持车身造型设计,输出车轮位移和外倾角关系图,判断车辆是否具备优异的运动学特性,输出车轮前束角和外倾角调节范围,得到轮心、弹簧、减振器的三者运动的杠杆比,计算悬架零部件的载荷支持悬架设计。研究成果在汽车设计领域具有较广泛的应用价值。
五连杆悬架;机械原理;自由度;DMU仿真;汽车底盘;机械运动分析;CATIA
在车辆底盘研发过程中,会遇到以下实际问题:例如汽车机械运动原理自由度如何计算,在车轮上下跳动过程中,各个摆臂、驱动轴、连杆、减震器、弹簧是否干涉,需要计算零件之间的间隙。车轮在过坑、过坎、纵向冲击等工况下,如何制作轮胎包络支持车身造型设计。车辆是否有较好的运动特性,四轮定位参数数值和变化斜率是多少。轮心载荷、弹簧载荷、减振器载荷、缓冲块载荷的相关性是什么。为了解决以上汽车研发的问题,本文解析汽车机械运动原理图,计算机构的自由度,创建五连杆后悬架运动学模型并应用仿真。
1 五连杆后悬架简介
1.1 五连杆后悬架结构和功能
汽车的底盘悬架结构是汽车的重要结构装置,承担着汽车整个车身以及车轮的力矩,保证车辆能够安全稳定地行驶[1]。
五连杆后悬架包括后副车架、前上摆臂、后上摆臂、前下摆臂、后下摆臂、前束杆、前束角偏心螺栓、外倾角偏心螺栓、后减振器、后稳定杆、稳定杆连杆、转向节等零部件,结构如图1所示。
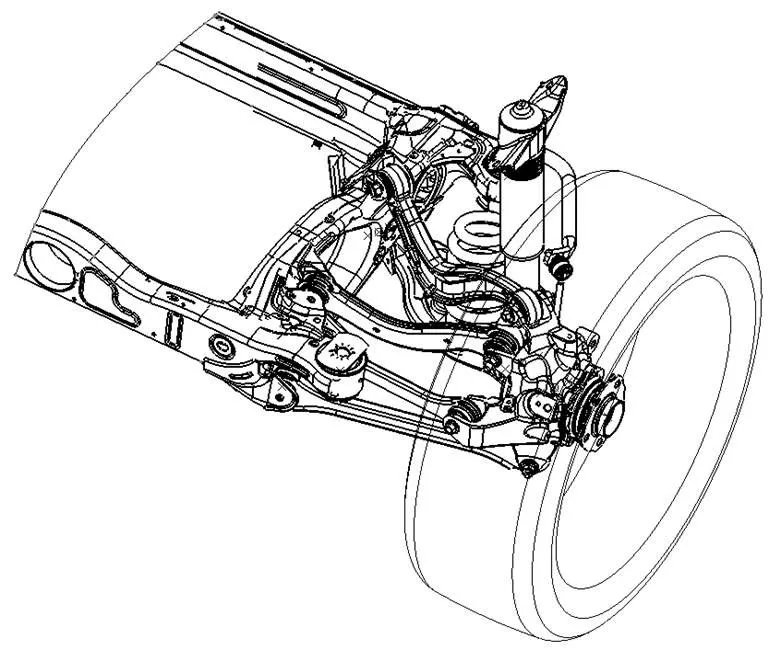
图1 五连杆后悬架结构图
五连杆后悬架各摆臂用途不同,其按功能可分为调节前束角的摆臂、调节外倾角的摆臂,支撑弹簧垂向载荷的摆臂、传递纵向侧向载荷的摆臂。五个摆臂共同控制了后车轮的运动轨迹,使车辆具备优异的运动特性。
控制臂本体是钢或铝材料的,用于传递侧向力。控制臂的两端是橡胶,它缓冲了冲击载荷,释放五个摆臂的自由度,避免机构过约束。
弹簧是支撑整车重量的零件,弹簧包括2个核心参数,分别是刚度(单位:N/mm)和载荷(单位:N)。车轮在上极限、设计状态、下极限各状态下,弹簧均处于被压缩状态,均有载荷。
车轮上跳时减振器被压缩,车轮下跳时减振器伸张[2]。减振器上端连接车身,下端连接摆臂,组成滑动副,控制着车轮向运动。
稳定杆是绕副车架做旋转运动的零部件。车辆在侧倾时稳定杆一端向上运动,另一端向下运动,此时稳定杆扭转变形。车辆垂向运动时稳定杆两端同时向上或向下运动,此时稳定杆衬套扭转变形。
稳定杆连杆的两端是球铰或衬套。稳定杆连杆是二力杆,它传递了稳定杆的垂向力。球铰和衬套释放稳定杆的自由度,使得机构能运动。
偏心螺栓在副车架的长圆孔中移动,它拉动摆臂改变位置,从而调整了车轮的外倾角和前束角。
2 机械运动原理
2.1 构件数量计算
构件是指机械中的一个独立的运动单元,机架是机械运动中的固定构件[3]。原动件是按照给定已知的运动规律独立运动的构件,从动件指其余活动构件。汽车悬架的机构组成及分类如表1所示。
2.2 运动副数量计算
运动副指两个构件直接接触组成的可动连接[3]。运动副按相对运动形式分为旋转副、滑动副、球铰副、刚性副、万向节副、点面副、点线副、圆柱副、螺钉副、平面副等。运动副的分类和定义如表2所示。
表1 机构组成及分类
序号构件分类备注 1后副车架和车身机架1个 2前上摆臂从动件10个 3后上摆臂从动件 4前下摆臂从动件 5后下摆臂(后外倾杆)从动件 6前束杆从动件 7后减振器活塞杆从动件 8后减振器油筒从动件 9后转向节单元从动件 10后稳定杆从动件 11后连杆从动件 12前束角偏心螺栓原动件3个 13外倾角偏心螺栓原动件 14后轮心垂向滑块原动件
表2 运动副的分类和定义
序号图标分类自由度定义 1固定副0一个部件相对另外一个部件没有运动 2旋转副1一个部件相对于另一个部件的旋转运动,其共用1个旋转轴 3滑动副1一个部件相对于另一个部件的平移运动,其共用1个滑动轴 4球铰副3一个零件相对于另一个零件的三个旋转运动,同时保持2个部件的铰接点重合 5刚性副0一个部件连接另外一个部件,没有运动 6万向节副2一个部件相对另外一个部件的两个旋转运动,同时保持2个部件的铰接点重合 7点面副5一个零件相对另一个零件的两个滑动和三个旋转运动 8点线副4一个零件相对另外一个零件的一个滑动和三个转动 9圆柱副2一个零件相对另外一个部件的滑动和转动 10螺钉副2一个零件相对另外一个部件的滑动和转动 11平面副3一个部件相对另外一个部件的XY平面运动
2.3 空间自由度计算
在空间中每个构件都有6个自由度,即3个相对移动的自由度和3个相对转动的自由度[3]。用表示运动副的自由度,它指两构件之间允许产生的相对运动的数目。用表示约束度,它指在运动副中自由度受到的约束的数目,满足关系式+=6。机构运动图如图2所示。
此运动模型可以简化为基本模块和其它模块。基本模块包含5个摆臂、1个转向节、1个副车架、1个轮心垂向移动。其他模块包含前束调节螺栓+外倾调节螺栓+稳定杆和连杆总成。汽车悬架约束和主动件的数量如表3所示。
表3 约束和主动件数量
序号项目I级运动副约束数主动件数 1机架100 2构件1300 3万向节副740 4球头副730 5滑动副450 6点面副110 7旋转副150 8前束角偏心螺栓001 9外倾角偏心螺栓001 10车轮垂向运动001
自由度的计算表达式为

式中,为活动件个数;为约束数;P为级运动副。
自由度数=13×6−(7×4+7×3+4×5+1×1+1×5)=3;主动件数=自由度=3,因此,机构可以运动。
3 悬架运动建模
3.1 输入参数
悬架运动件建模时需要输入以下参数,如表4所示。
表4 输入参数项目
项目硬点及行程参数数值 硬点副车架前安装点坐标(X,Y,Z) 副车架后安装点 前上摆臂内点 前上摆臂外点 后上摆臂内点 后上摆臂外点 前下摆臂内点 前下摆臂外点 后下摆臂内点 后下摆臂外点 前束杆内点 前束杆外点 后减振器上点 后减振器下点 后轮心 稳定杆安装点 连杆上点 连杆下点 四轮定位参数前束角 外倾角 前束杆偏心螺栓行程 外倾杆偏心螺栓行程 行程车轮上行程 车轮下行程
3.2 创建构件
依次创建后副车架和车身、前上摆臂、后上摆臂、前下摆臂、后下摆臂、前束杆、前束杆偏心螺栓、外倾杆偏心螺栓、后减振器活塞杆、后减振器油筒、后稳定杆、后连杆、转向节、垂向滑块(Aux_z)等零部件,零件装配图如图3所示。
3.3 创建约束
各零件之间的约束关系如表5所示,各零件约束图如图4所示。
3.4 创建驱动仿真
点击仿真按钮并输入车轮行程和偏心螺栓的行程,如图5所示。
4 悬架DMU模型应用
4.1 应用一:运动件间隙校核
在车轮上下跳动过程中,校核各运动件的间隙,预防各摆臂运动碰撞干涉,如图6所示。

图3 零件装配图
表5 零件约束关系
序号第一零件第二零件约束关系 1后副车架和车身地面固定副 2前上摆臂后副车架万向节副 3后上摆臂后副车架万向节副 4前下摆臂后副车架万向节副 5后下摆臂外倾杆偏心螺栓万向节副 6前束杆前束杆偏心螺栓万向节副 7前束杆偏心螺栓后副车架滑动副 8外倾杆偏心螺栓后副车架滑动副 9前上摆臂后转向节球铰副 10后上摆臂后转向节球铰副 11前下摆臂后转向节球铰副 12后下摆臂后转向节球铰副 13前束杆后转向节球铰副 14后减振器活塞杆车身球铰副 15后减振器活塞杆后减振器油筒滑动副 16后减振器油筒下摆臂万向节副 17转向节轮心垂向滑块点面副 18垂向滑块副车架垂向滑轨滑动副 19后稳定杆后副车架旋转副 20后稳定杆后连杆万向节副 21后连杆后摆臂球铰副
同时在本悬架DMU基础上,工程师可以用VB 编程语言对CATIA 进行二次开发,生成自动测量悬架零部件运动间隙程序,利用程序设计语言调用 CATIA 自动化对象,自动对悬架零部件的运动间隙进行测量,并绘制成曲线图[4]。
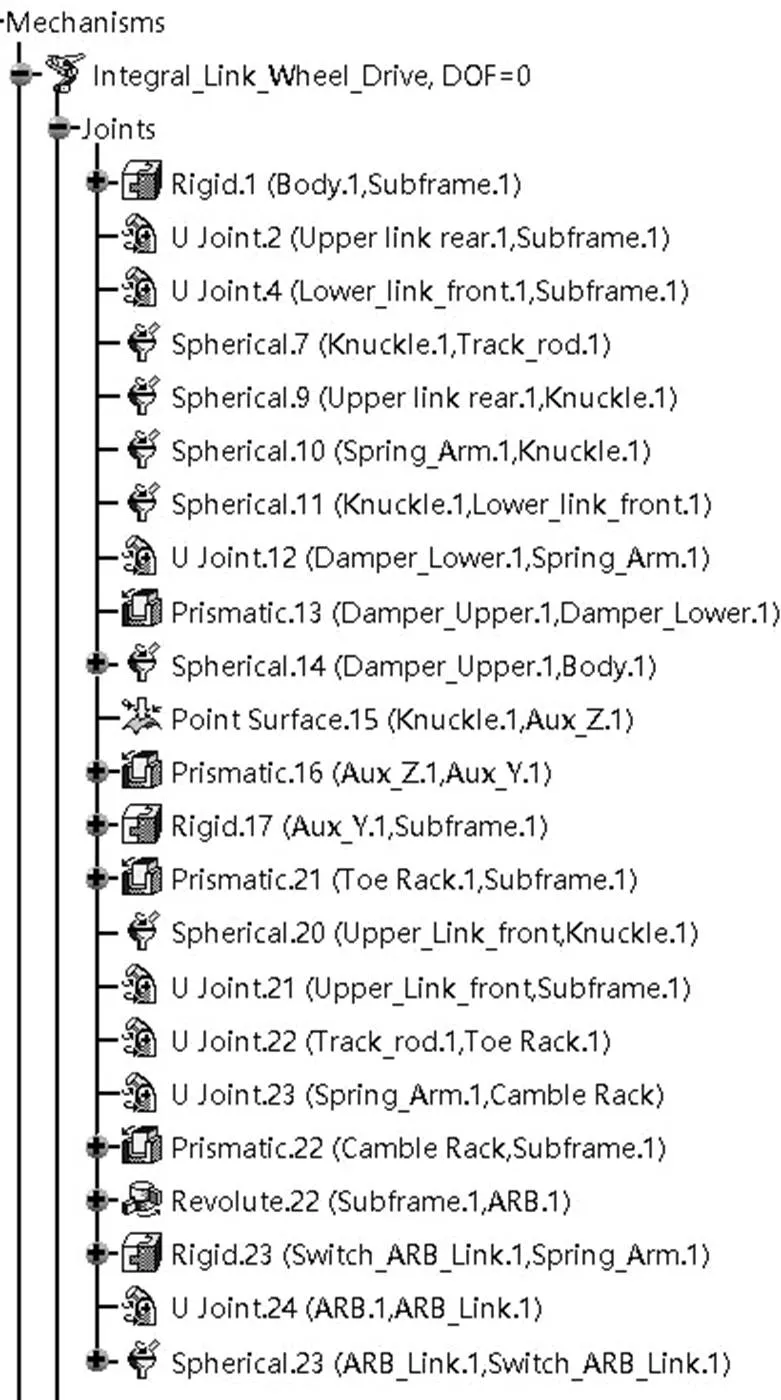
图4 零件约束图
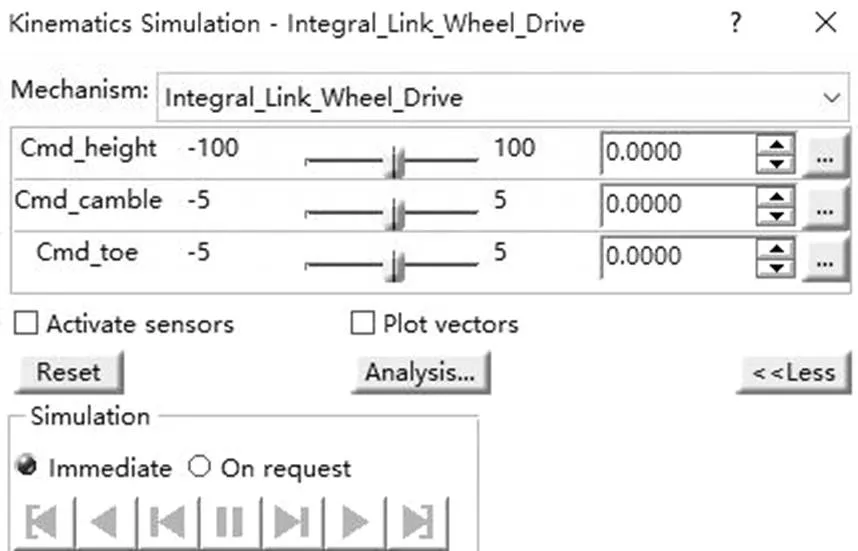
图5 驱动仿真图
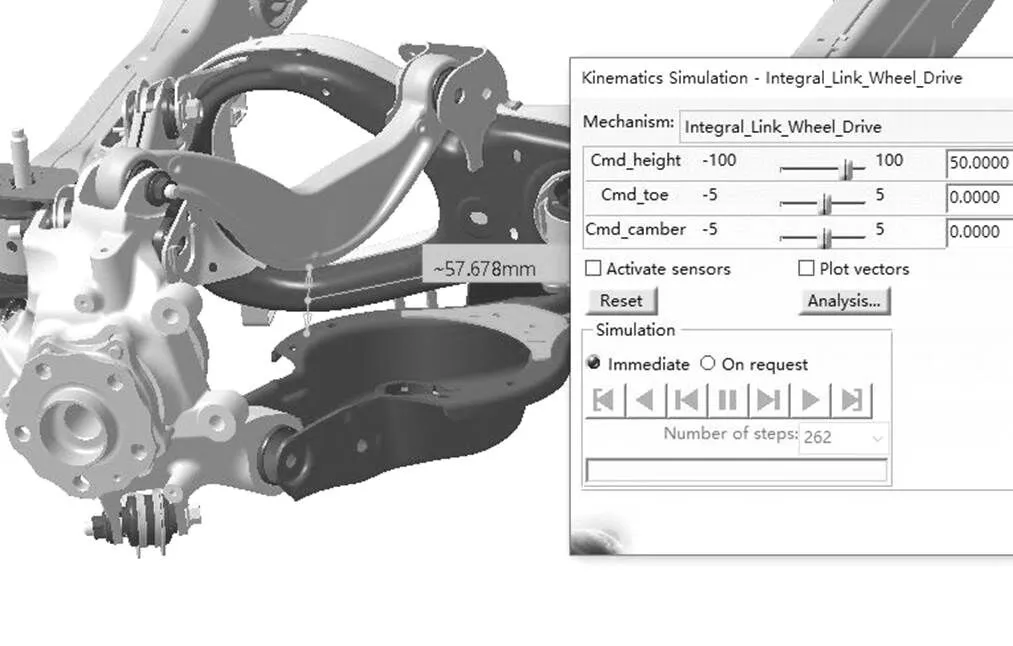
图6 校核运动件间隙图
4.2 应用二:制作轮胎包络支持
车辆行驶过程中车轮上下前后运动。本模型可生成轮胎包络,用于车身设计和造型设计,如图7所示。
图7 轮胎包络图
通过对轮胎与轮罩间隙设计的因素进行研究分析和整车耐久试验数据对比,工程师可以制定轮胎包络规范,预防新车型轮胎撞击轮罩[5]。
4.3 应用三:输出轮心坐标和四轮定位参数
输出轮心和摆臂硬点位置,如图8所示;输出车轮行程和外倾角关系图,如图9所示。输出调整偏心螺栓后的外倾角和前束角。

图8 轮心位置图
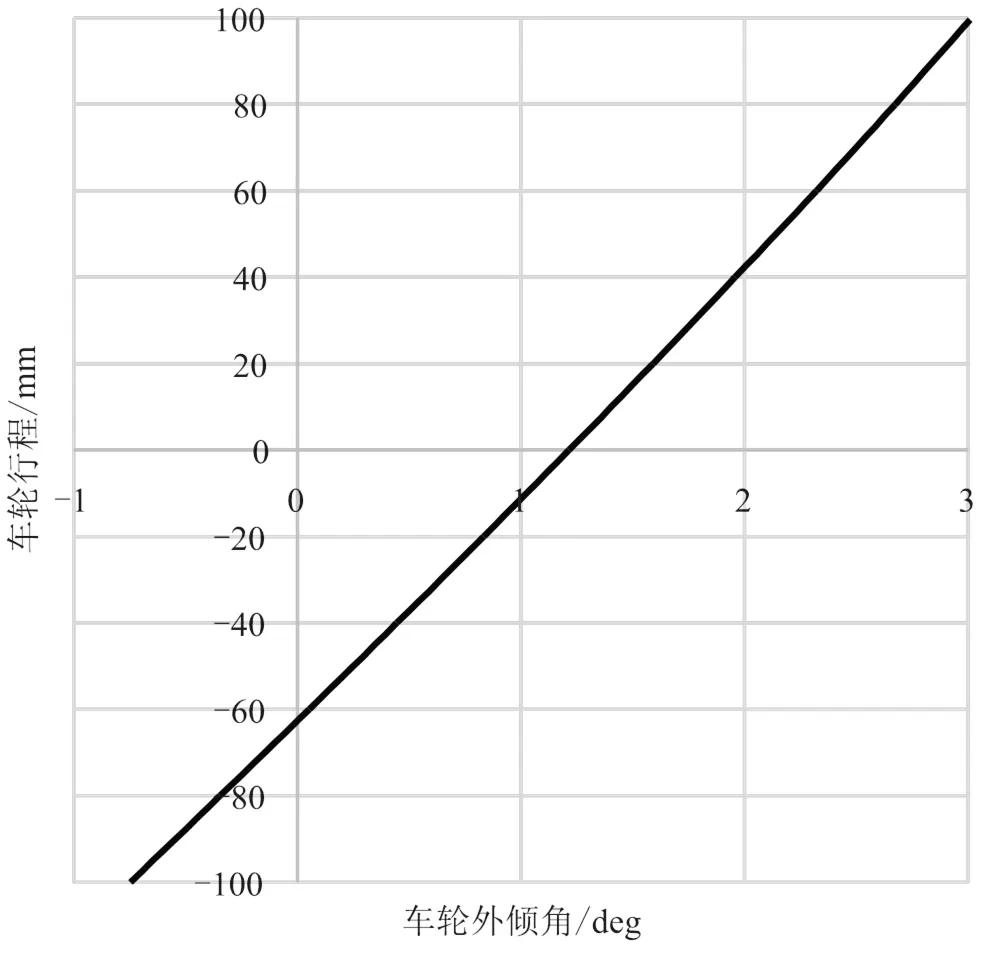
图9 车轮行程和外倾角关系图
本DMU模型可用于设计四轮定位目标值和公差,预防车辆跑偏。避免车辆行驶跑偏造成的啃胎和轮胎磨损。驾驶员不需要长期在方向盘上施加一个与跑偏方向相反的作用力,避免了驾驶员疲劳[6]。
4.4 应用四:悬架载荷分析
通过DMU获取车轮弹簧减振器的杠杆比,在得知轴荷、零件刚度等参数下,可计算车轮、弹簧缓冲块的受力载荷,支持悬架零部件设计。如图10所示。
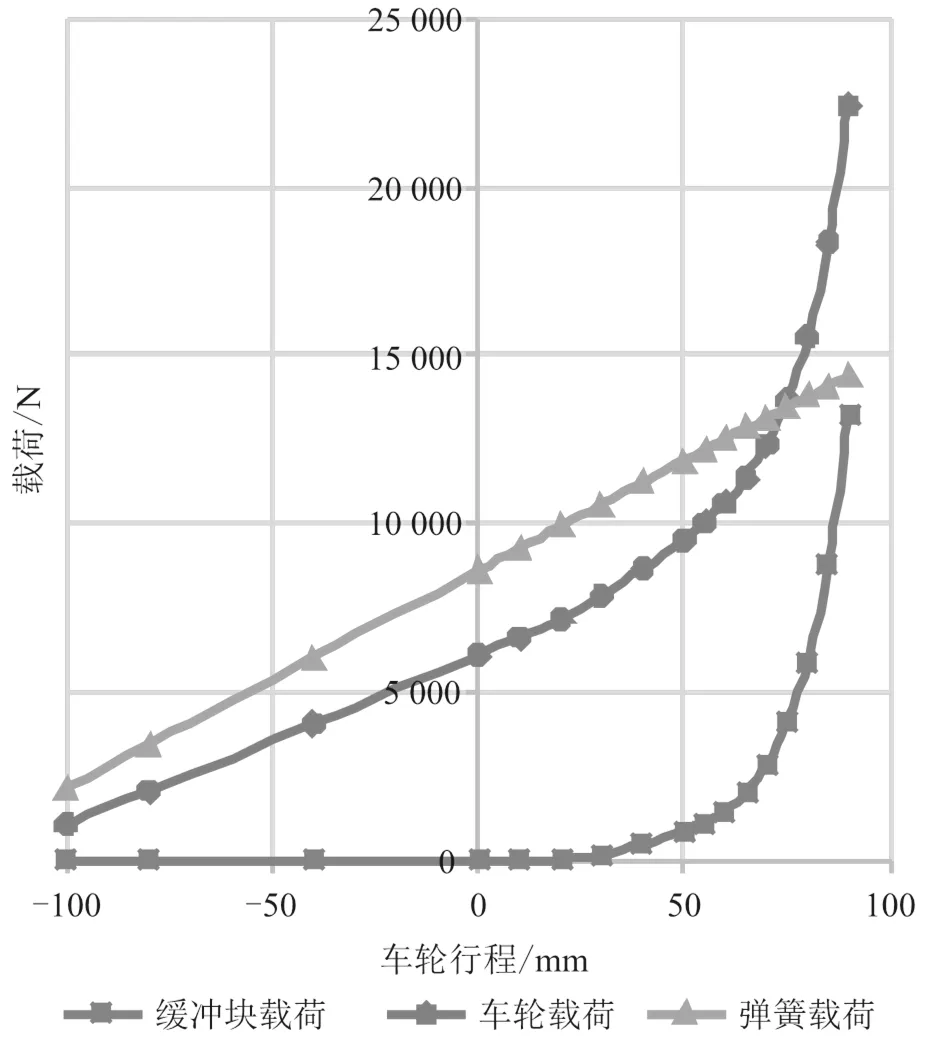
图10 车轮行程-载荷关系图
5 结论
本文旨在解决汽车设计中遇到的实际问题,校核零部件间隙,制作轮胎包络,提取四轮定位参数曲线,计算零部件载荷。
本文从理论力学和机械原理角度,通过计算构件数量,计算运动副数量,计算空间自由度,解释了后悬架机械运动原理。同时本文详细介绍了汽车五连杆后悬架DMU建模方法。
本文实用性强,在汽车设计领域具有广泛的应用价值。
[1] 俞海平.汽车底盘悬架结构设计要点分析[J].内燃机与配件,2022(11):20-22.
[2] 王霄锋.汽车悬架和转向系统设计[M].北京:清华大学出版社,2015.
[3] 孙恒,葛文杰.机械原理[M].北京:高等教育出版社, 2021.
[4] 段维.悬架零部件运动间隙自动测量程序开发[J].汽车实用技术,2022,47(6):36-42.
[5] 刘明,刘春梅,韩权武.车轮与轮胎设计间隙研究[J].时代汽车,2021(3):124-125.
[6] 刘杰,郑小龙.基于六西格玛的车辆跑偏问题分析[J].时代汽车,2022(12):22-24.
Mechanical Motion Analysis and DMU Simulation of Automotive Five-link Rear Suspension
JIA Weizhen1, MA Zuguo2, CHEN Hongzheng2, YU Jiang2
( 1.Hangzhou Branch, Ningbo ZEEKR Intelligent Technology Company Limited, Hangzhou 310051, China;2.ZEEKR Automobile (Ningbo Hangzhou Bay New Zone) Company Limited, Ningbo 315336, China )
This article introduced the structure, mechanical motion principle, suspension motion modeling, and digital mock-up (DMU) model application of the automotive chassis five-link rear suspension. This article analyzed the mechanical motion principle of the automotive five-link rear suspension from a theoretical point of view, calculated the number of components, calculated the number of motion pairs, and calculated the degree of freedom of space. This article detailed the CATIA DMU kinematic modeling process, including input parameters, creating parts, creating constraints, and creating drive simulations. This article used the suspension DMU model to solve the practical problems of automotive chassis design, including checking the clearance of each moving part to prevent part collision interference. Make tire sports envelopes to support body styling. Output the wheel displacement and camber relationship diagram to determine whether the vehicle had excellent kinematic characteristics. Output wheel toe angle and camber adjustment range. Obtain the lever ratio of the movement of the wheel center, spring, and shock absorber, and calculate the load of the suspension part to support the suspension design. This article has a wide application value in the field of automotive design.
Five-link suspension; Mechanical principle; Degree of freedom; DMU simulation;Automotive chassis;Mechanical motion analysis;CATIA
U463.33+1
A
1671-7988(2022)21-102-06
U463.33+1
A
1671-7988(2022)21-102-06
10.16638/j.cnki.1671-7988.2022.021.019
贾威振(1989—),男,工程师,研究方向为汽车底盘悬架集成研发,E-mail:jiaweizhen1989@163.com。
