基于滚动优化策略的车路协同智能车流控制方法
2022-11-22张海民
龚 勇 张海民
(1.宣城职业技术学院 信息工程系,安徽 宣城 242000;2.安徽信息工程学院 计算机与软件工程学院,安徽 芜湖 241000)
随着互联网技术的不断发展,其为交通运输方面也带来了巨大改变,实现了通过对行驶路段周围环境信息进行获取,进而完成对车辆的控制,更加全面顺应车流控制过程中车辆的行驶速度、车辆间距等车流特性[1],提高驾驶的安全性和舒适性。目前,关于车路协同智能车流控制可分为目标车道前后车加减速协同和多车道多车换道协同两类,其中后者即为在多车道多车情景下多车同时换道的协同行为。
对于车路协同智能车流控制已有部分学者做了相关研究,其中,韩直[2]等人为提升车辆通行效率,以预测型诱导策略为基础,以排队长度作为交通诱导的约束条件,利用小波神经网络短时交通量预测预知路段堵死事件发生路段,建立广域诱导模型;引入基于路径尺度的Logit路径选择模型作为诱导路径选择方法,通过流量迭代分配方法实现路网负载均衡。通过实例验证,该诱导方法能有效地缓解道路交通拥堵,提高路网通行效率;岳昊[3]等人为克服利用传统静态交通流分配模型分析拥堵道路网络交通流分配问题的不足,提出交通拥堵状态下静态拥堵交通流均衡分配模型。提出道路网静态拥堵交通流分配的用户均衡与系统最优原理,并构建道路网静态拥堵交通流用户均衡与系统最优分配模型,求解用户均衡模型的迭代加权求解算法。结果表明拥堵用户均衡分配模型与拥堵系统最优分配模型可以合理描述拥堵用户均衡原理与系统最优均衡原理,且拥堵用户均衡分配模型可以合理描述路网处于全拥堵状态下各路段实际通过流量。
基于此,本文提出一种基于滚动优化策略的车路协同智能车流控制方法。在对车路协同条件下车流特性分析的基础上,分别从车路控制过程中的稀疏纵向间距阶段和换道阶段进行研究,并根据不同时刻的最佳参数变化情况,对控制模型进行滚动优化,完成对模型控制性能的不断更新,并通过仿真实验对所提方法进行测试,实验结果表明,在对同向双车道进行车流控制过程中具有较高的平缓性及安全性,对于车流控制研究具有一定的参考价值。
1 车路协同条件下的车流特性分析
车路协同实现了车-车、车-路之间的实时数据交换,这也成为正确及时调整驾驶行为的主要依据。基于此本文首先对车路协同整体结构与功能进行了研究,总结了其在数据采集方式上存在的特点,并对车流中关键微观参数进行分析,研究车路协同条件下车流三要素之间的关系。
1.1 车路协同结构
车路协同(CVIS)主要是通过将车流的各个组成部分,也就是驾驶人、车辆、路况、行驶环境这四方面因素,通过现代通讯技术进行感知,利用互联网等技术完成对采集到的信息进行交互,以此实现车流大环境的整体协调与联动[4]。
在车路协同系统中,其各组成单元包括车载单元、路侧单元、中心服务器、视屏监控系统、信号控制系统,主要是通过4G网络进行连接。路侧单元(RUS,Road Side Unit)主要负责对车路协同系统的自身状态进行检测,同时感知行驶车辆周围的环境信息,包括周围行驶车辆的信息、道路特性信息、行驶路面异常事件信息等;车载单元(OUS,On Board Unit)主要负责对自身驾驶车辆状态信息进行获取,同时感知车辆周围其他障碍物的信息采集,包括车辆、固定障碍物、行人等,并根据感知到的数据结果进行车辆安全预警,通过车载界面为驾驶员提供车载控制参考,为驾驶员操作提供判断依据;中心服务器主要负责整个系统的控制,包括信息通讯、环境监控等。
1.2 车流数据采集环境
车路协同环境下,由于获取信息的方式为动静结合,信息采集范围更广,不仅可以获取自身车辆状态数据,还可以对周围环境等信息进行感知[5],车路协同对于车流数据的采集具有以下特点:
(1)连续:每辆车在其存在过程中都会在时间和空间上形成连续的“运行轨迹”。
(2)多维:对于数据的采集不再局限于“停止”或者“运动”状态的判断,可以通过路侧单元实时获得周围车辆在t时刻的完整信息,包括所在位置、运行速度、加减速、出发地与目的地等。
(3)全覆盖:全样本量、全路程、全时间。
(4)多样:获取的信息包含交通信号配时、行驶道路实时路况,以及其他环境信息。
基于车路协同的这种信息采集特点,极大地提高了信息的高效性,使车流信息更具可靠性,为智能车流控制提供基础。
1.3 车流基本参数关系分析
在车流数据中主要包含3个基本参数,即流量Q,速度V,密度α。其基本关系可以表示为Q=αV,但需要注意的是,作为实际道路的车流数据,Q、V、α都是存在极值的,也就是道路所能承载的最大容量,因此,本文在此基础上对三者关系进行如下分析。
首先,对速度-密度的关系进行分析。格林希尔兹(B.D.Greenshields)在1955年提出速度、密度的关系,并且说明了其之间存在着线性关系,表达式如式(1)所示:

在确定速度-密度关系之后,就可以通过车流三要素的基本关系Q=αV对速度-流量关系进行分析。通过推导,不难得出速度-流量关系,如式(2)所示:

从式(2)中可以看出,在Q达到道路承载极限,也就是Qmax之前,V是随着车流密度增大而减小,而与之相反,流量随着密度增大而增加;当Q=Qmax后,速度和流量都会出现随着密度的增大而下降的现象。
在上述基础上,推导出流量-密度关系,如式(3)所示

从式(3)中可以看出,在Q达到道路承载极限之前,车流密度与流量成正比,密度越大流量越大,而当Q达到道路承载极限后,密度与流量成反比,密度越大流量越小。
2 基于滚动优化策略的车路协同智能车流控制
在分析车路协同特点以及道路三要素基本关系的基础上,为实现安全、高效的车路协同智能车流控制,本文建立了多目标协调控制模型,并引入滚动优化策略,为模型进行优化。首先将车流控制过程分为稀疏纵向间距阶段和换道阶段。在稀疏纵向间距阶段使车流具有足够稀疏空间;换道阶段有了足以实现车流控制的安全距离,可以降低对避免冲突的约束要求,降低计算难度。同时对车流控制过程中存在的局部极值问题进行分析,引入了滚动优化策略[6],解决该问题。
基于滚动优化策略的车路协同智能车流控制系统架构如图1所示。首先通过对车辆运行状态和周围环境进行实时数据采集,根据数据分析结果制定车流控制参数[7],在车辆控制过程中,通过随控制效果的实时反馈结果,调节油门开度、制动压力和转向盘转角,实现安全、高效的智能车流控制。

图1 车路协同智能车流控制系统架构
2.1 稀疏纵向间距阶段
在得到车路协同条件下采集的路况信息基础上,首先对是否需要进行换道处理进行判断,当判断结果为需要换道时,则进行以下车路协同智能车流控制流程。
在换道开始前,首先要对换道车辆与前后车之间的纵向间距进行调整,确保其之间存在足够的安全距离进行其他车辆控制处理。在这里假设每辆车都是完全对称的矩形,且仅当车辆的4个拐角都不与障碍物发生碰撞时,才允许进行换道,如图2所示。
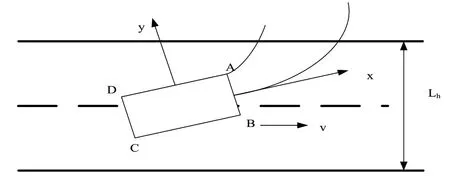
图2 车辆运动学示意图
根据已有的对于任意放置的不同矩形间避免碰触的条件,建立将车流控制过程中车辆约束公式

式中:SΔ为三角区域面积;SX为矩形区域面积;P∈{Aj,Bj,Cj,Dj},j=1,2,…。
并对自身车辆SV、换道前车道的前车LV和换道后车道的前车ALV,以及换道后车道的后车AFV分别进行加速度分析,将判断误差最小化,保证在车辆纵向驾驶过程中车内人员的舒适性,该阶段目标函数可以表示为:
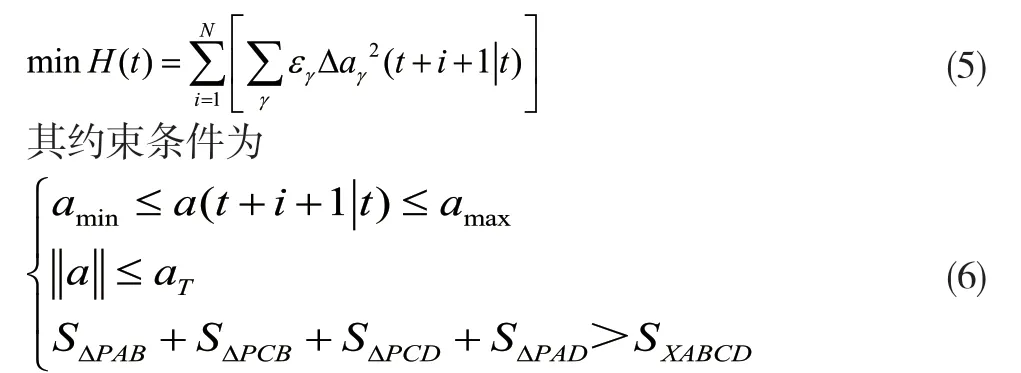
式中:N为对周围环境动态因素的预测时间范围;为车辆的状态参数;为对应参数的权重因子;amin、amax分别为控制车辆内乘车人员可接受加速度极值;aSV=aSV(t+i+1|t)-aSV(t+i|t)则为车辆换道过程中加速度的变化率;根据不同时刻的可接受的最小、最大舒适加速度数据变化,对车流已有数据进行更新,基于此完成车流控制参数的滚动优化,根据优化结果为下一次的车流控制提供参考;aT为驾驶员可接受的最大舒适纵向加速度变化率。
2.2 换道阶段
第2阶段由稀疏队形开始,因为在第1阶段已经对碰撞因素进行约束,因此,在该阶段不必再单独考虑碰撞因素,实现了减小模型求解难度的目的。
首先分别对驾驶车辆与周围车辆的加速度、车辆间距进行分析,并通过约束加速度的取值范围对车辆换道模型进行约束,优化控制结果,其目标函数可以表示为
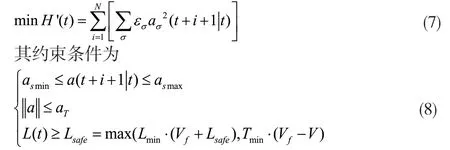

式中:T为换道过程中横向移动所需时间;Lh为换道宽度,即换道过程中的总横向位移。根据换道过程中横向位移的变化如式(10)所示

当横向位移与车道宽度Lh相等时,即视为完成换道。基于滚动优化策略的车路协同智能车流控制系统工作流程如图3所示。
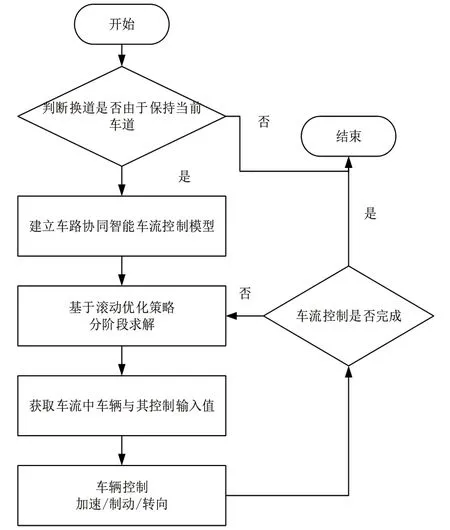
图3 基于滚动优化策略的车路协同智能车流控制系统流程图
首先获取车辆状态参数和道路信息参数,分析换道行为对车流状况是否存在车流优化效果;当存在换道的必要时,建立对应的多目标协调优化车路协同智能车流控制模型;根据换道过程中获取的不同时刻各协作车辆的可接受的舒适车流控制参数极值,对控制参数进行滚动优化,对模型进行更新,通过输入期望控制参数,完成基于滚动优化策略的车路协同智能车流控制。
3 仿真实验
3.1 实验参数及设置
为对所提方法的性能进行测试,本文选用Matlab/Simulink进行仿真实验,用CarSim作为车辆动力学仿真软件,搭建了多车协同驾驶Simulink-CarSim联合仿真平台。设计实验路段长度为1 000m,Lh车道宽度为3.6米,权重因子εσ为0.15,权重因子εy为0.2,amin和amax分别为-4m/s2和4m/s2。为对比所提方法在车流控制方面的有效性,分别采用文献[2]方法和文献[3]方法对比组进行实验。
假设道路上有四辆网联式驾驶车辆行驶在2条车道线内,每条车道2辆,分别采用本文所提方法,以及文献[2]和文献[3]方法将四辆自主驾驶车辆汇聚成一维编队。
3.2 仿真实验对比
在控制过程中,不同方法控制下车辆的速度与车辆间距分别如图4、图5所示。
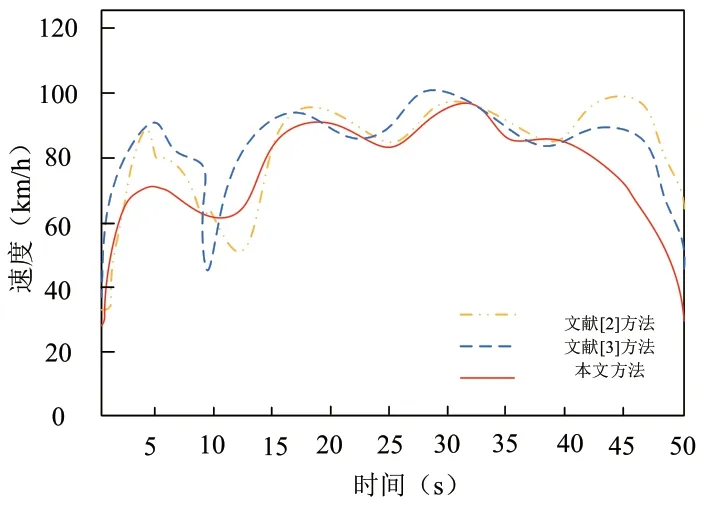
图4 车流速度-时间曲线

图5 车流距离-时间曲线
从图4可以看出,在进行车辆换道控制过程中,采用本文方法控制时,车辆的速度变化在整个过程中未出现加速度绝对值大于极值加速度的情况,且在完成换道后,车辆速度逐渐回归至初始速度,而文献[2]、文献[3]方法均出现不同程度的速度激增和骤降情况,对于安全性和舒适性均造成一定程度的负面影响。本文方法因为在对车流进行控制的过程中,根据采集到的数据对控制输入进行滚动优化,提高了控制效果。
从图5可以看出,在初始阶段未进行换道之前,车间距稳定在15m,换道后车辆间距逐渐加大,本文方法在换道过程中车间距未出现较大波动,而文献[2]、文献[3]方法相对变化较大,这主要是因为本文方法对实现换道过程中的速度稳定性控制,在相对稳定的运行状态下,未造成大幅度的车辆间距变化。仿真过程中,障碍车辆在车辆行驶100m时出现,控制车辆方向盘转角如图6所示。从图6可以看出,在整个车流控制过程中没有因为控制目标的变化造成方向盘急打,保障了驾驶舒适性,且本文所提控制方法下,变道轨迹规划逐渐平缓,轨迹误差最终收敛,这一特性可以保证车流运行轨迹逐渐最优,提升了车流控制过程中避障策略的平顺性。
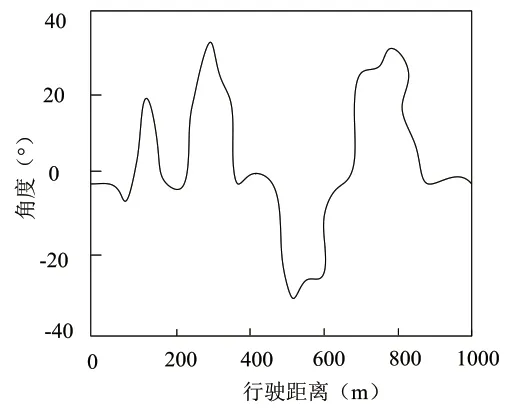
图6 控制车辆方向盘转角曲线
4 结论
本文基于车路协同系统所具备的全面实时的路况信息采集性能,分析了车流控制过程中自身及周围车辆的数据信息,提出基于滚动优化策略的车路协同智能车流控制方法,将整个换道过程划分为稀疏纵向距离阶段和换道阶段两个部分,并引入滚动优化策略对控制过程中的输入参数进行更新,减小了优化控制模型的求解难度,并通过仿真实验验证了所提方法的有效性。但受时间和条件限制,研究尚存不足,在之后的研究中,可以引入多车道车流控制实验,同时条件允许情况下进行实际实验,验证其他环境因素对控制方法是否存在影响。
