负重型下肢外骨骼人机耦合的腿部绑缚系统研究
2022-11-21陈宗民
陈宗民,干 静,武 豪,王 彪
(四川大学机械工程学院,四川 成都 610031)
1 引言
外骨骼是一种能够增强或辅助人体运动机能的可穿戴仿生动力辅助机械装置,具有非常广阔的发展前景与运用场景[1]。外骨骼在运行过程中所有的受力均通过绑缚结构传递,是人机物理交互的重要接口。较高的人机耦合程度可以减少相互运动干涉,降低外骨骼人机耦合运动的安全性、匹配性、可靠性与舒适性。
文献[2]在综合研究与分析了多关节外骨骼助力机器人的发展现状与关键技术;文献[3]对蹲起时助力外骨骼的人机耦合作用下的关节驱动补偿进行了研究;文献[4]基于三维运动捕捉提出了一种下肢外骨骼人机耦合粗糙度的评价方法;文献[5]通人体仿真软件与动作捕捉系统分析与评估了两种绑缚约束条件下外骨骼人机耦合情况。在实际的外骨骼研究与设计过程中发现,绑缚系统在人体与外骨骼间起到直接接触、连接、力传递与固定作用的,绑缚系统优化能够一定程度上直接提升外骨骼人机耦合程度,但事实上目前相关的设计与研究相对较少,需要进一步挖掘。
2 理论分析
目前的国内外刚性外骨骼产品腿部绑缚系统大都采用由大腿绑缚与小腿绑缚组成的形式,本实验在于探究绑缚位置与绑缚数量对人机耦合的影响,所以将绑缚系统简化为径向尺寸不同的刚性结构来消除绑缚结构带来的影响。
腿部可绑缚的位置相对较多,根据国内外大量外骨骼产品的研究[6]发现外骨骼腿部绑缚设计的三个主要特征:绑缚数量、绑缚位置以及绑缚尺寸。这里的人机耦合运动主要针对腿部绑缚设计的绑缚数量与绑缚位置两个主要特征,在此基础上提出对人机耦合影响的假设:绑缚位置的降低或绑缚数量的增加均能够提升人机耦合程度。
3 运动分析
在行走运动状态下,肢体在冠状面及水平面内的摆动幅度相比矢状面内的摆动幅度较小,所以选择矢状面进行二维行走步态分析[7],行走步态分析,如图1所示。在此基础上建立坐标系,并构建三连杆机构人体运动简化模型,进行运动学分析[8]与动力学分析[9]。

图1 行走步态分析Fig.1 The Analysis of Walking Gait
将踝、膝、髋以及肩关节简化为转动副,将小腿、大腿以及躯干简化为连杆,得到地面与小腿相对踝关节的夹角θ1、小腿与大腿相对膝关节的夹角θ2以及躯干与大腿相对髋关节夹角θ3,运动学简化模型,经过三角函数计算就可得到踝关节角位移φ1、膝关节角位移φ2以及髋关节角位移φ3,根据几何关系运算得到关节角位移方程如式(1)所示,如图2所示。
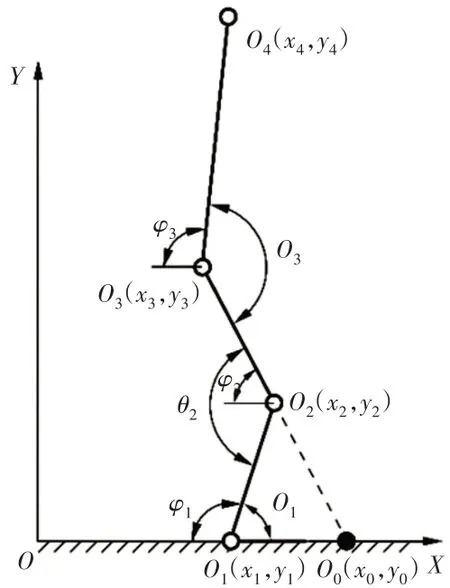
图2 运动学简化模型Fig.2 The Simplified Model of Kinematics

在运动学简化模型的基础上建立3自由度人机耦合运动系统的动力学简化模型,如图3所示。在行走步态变化中,肌肉变形导致腿部绑缚与肢体相互作用受力情况复杂,所以将所有的作用力均简化到接触受点力。小腿绑缚简化到受力点A,将受力简化为分力FxA与FyA,力臂LA为受力点A到膝关节O3的长度。大腿绑缚简化到受力点B,将受力简化为分力FxB与FyB,力臂LB为受力点B到膝关节O2的长度。人机腰背接触受力简化到受力点C,将受力简化为分力FxC与FyC,力臂LC为受力点C到膝关节O3的长度。在运动学模型建立的运动参数基础上,得到人机耦合动力学简化模型的拉格朗日动力学方程式,如式(3)所示。

图3 动力学简化模型Fig.3 The Simplified Model of Dynamics

式中:τ—3×3 阶关节驱动力矩矢量矩阵;M—3×3 阶广义质量矩阵;H—3×3 阶向心力及哥式力矩阵;G—3×3 阶重力矩阵;F—3×3阶广义力适量矩阵。
4 实验过程
实验由模拟仿真实验与样机测试实验两个部分组成,模拟仿真实验主要基于OpenSim 生物力学仿真分析软件[10],通过二次开发构建人机刚柔耦合运动系统模型,模拟绑缚作用力产生的影响。但肌肉在受力变形后会对绑缚结构产生的影响,需要通过样机测试实验来探究。样机测试实验基于下肢负重外骨骼绑缚样机,如图4 所示。实验对象穿戴样机在无驱动状态下进行人机耦合运动,测量腿部绑缚产生的相对偏移与人体生理体征影响。

图4 下肢负重外骨骼绑缚样机Fig.4 The Experimental Prototype of Lower Limb Booster Exoskeleton
4.1 人机耦合系统构建
首先根据中国成年人人体尺寸,如表1所示。对人体骨肌模型进行模型缩放与测量标记,得到修改后的全身骨肌模型。应用SolidWorks 软件建立负重下肢外骨骼简化模型,采用Bushing Force约束力与Hunt Crossley Force 接触力来模拟人机耦合运动中的外骨骼腿部绑缚受力情况,装配得到人机耦合系统模型,如图5所示。根据人体下肢可供绑缚空间尺寸与一般特征轴向尺寸,将大腿与小腿分别划分为三个绑缚区域,如图5所示。根据绑缚数量与绑缚位置设置绑缚实验模型,腿部绑缚实验模型设置,如图7所示。

表1 中国成年人人体尺寸(a)Tab.1 Chinese Adult Body Size(a)

表1 中国成年人人体尺寸(b)Tab.1 Chinese Adult Body Size(b)
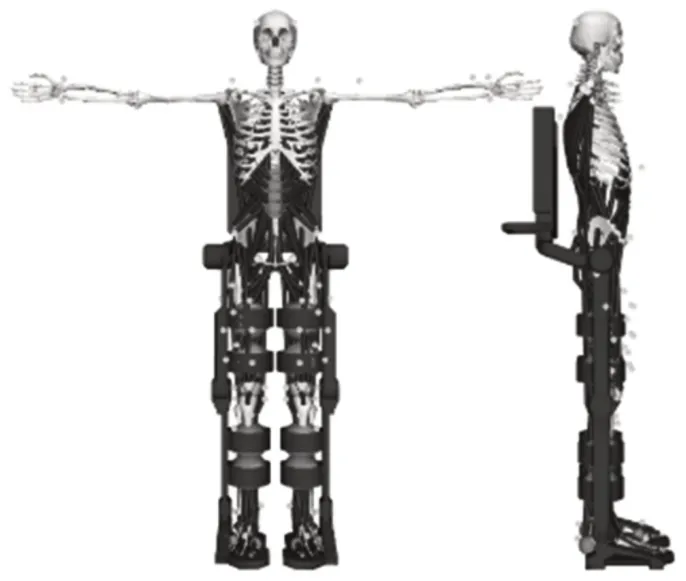
图5 人机耦合模型Fig.5 Man-Machine Coupling Model

图6 绑缚区域划分Fig.6 Division of Binding Area

图7 模拟仿真实验模型设置Fig.7 The Setting of Simulation Models
4.2 模拟仿真实验
选择典型行走步态作为实验的运动控制数据,采用RRA算法优化各关节运动学数据,最终应用CMC正向动力学算法计算得到下肢各关节的运动学与动力学数据[11]。导出最能体现人机耦合运动特征的关节力矩曲线作为人机耦合匹配度判别依据,选择左膝关节作为特征关节。
人体骨肌模型膝关节力矩曲线作为理想曲线,如图8所示。其对应的关节角位移曲线,如图9所示。各组对照模型实验仿真对应的膝关节力矩曲线,如图10~图13所示。在绑缚数量确定的条件下,分析关节力矩曲线与理想曲线偏差,发现在大腿处伴随绑缚位置距离髋关节的增大而缩小,在小腿处伴随绑缚位置距离膝关节增大而缩小;在绑缚距离确定的条件下,实验曲线峰值处伴随绑缚数量的增加变得更加平滑。偏差越小说明人机耦合运动干涉产生的阻力越小,人机耦合相对越好;曲线平滑则说明绑缚结构在人机耦合运动过程中人机运动误差较小,人机耦合相对较好。增加绑缚数量能够进一步减弱人机耦合运动干涉产生的阻力,同时也提高了人机连接精度,所以人机耦合程度得到了提升,但人机耦合运动干涉与人机运动误差并不能完全消除,所以在达到了一定程度后,增加绑缚数量对人机匹配度的提升效率逐渐减弱。

图8 膝关节力矩理想曲线Fig.8 The Ideal Curve of Knee Joint Torque

图9 膝关节角位移理想曲线Fig.9 The Ideal Curve of Knee Joint Angular Displacement

图10 大腿绑缚位置对应膝关节力矩曲线Fig.10 The Curve of Knee Joint Torque Corresponding to the Binding Position of Thigh

图11 小腿绑缚位置对应膝关节力矩曲线Fig.11 The Curve of Knee Joint Torque Corresponding to the Binding Position of Calf

图12 绑缚数量对应膝关节力矩曲线Fig.12 The Curve of Knee Joint Torque Corresponding to the Number of Bindings

图13 大腿绑缚位置与人机耦合程度插值曲线Fig.13 Interpolation Curve of Thigh Binding Position with the Degree of Man-Machine Coupling Degree
4.3 样机测试实验
样机测试研究对象的基本生理信息,如表2所示。在实际样机测试中发现,由于重力作用会产生绑缚滑移的现象,该现象会伴随人机耦合运动的时间增长而加剧,绑缚下滑导致外骨骼机构转轴轴心与人体关节轴心发生偏移,产生偏心矩增大的情况,加剧干涉运动产生的作用力,促使绑缚进一步位移,通过增加绑缚数量的方法可以有效的降低这种情况的发生,但每增加一副绑缚平均增加11.36s的穿戴时间,而且会在一定程度上导致穿戴者血压增高。

表2 研究对象的基本生理信息(a)Tab.2 Basic Physiological Information of the Subjects(a)

表2 研究对象的基本生理信息(b)Tab.2 Basic Physiological Information of the Subjects(b)
在样机测试试验中还发现,大腿越靠近膝关节处则腿围个体差异缩小且形变相对较少,受到肌肉变形的影响也较小,在膝关节处存在小幅腿围增大变化,能够为绑缚提供一定程度的结构约束;小腿靠近踝关节处虽然绑缚的力学性能较好但绑缚滑移明显,靠近膝关节处虽然存在结构约束,但力学性能相对较差。
将各组曲线与理想曲线的数据方差倒数进行归一化处理,通过三次样条插值方法建立绑缚数量、绑缚位置与人机耦合程度的关系曲线,如图14~图16所示。通过仿真模拟与样机测试结果的综合分析,可以得到相对较优的绑缚系统是在大腿处应选择远离髋关节的区域设置2副绑缚,在小腿处则应选择在小腿靠近膝关节处与靠近踝关节处各设置1副绑缚共2副绑缚,如图17所示。

图14 小腿绑缚位置与人机耦合程度插值曲线Fig.14 Interpolation Curve of Calf Binding Position with the Degree of Man-Machine Coupling Degree

图15 绑缚数量与人机耦合程度插值曲线Fig.15 Interpolation Curve of the Number of Bindings with the Degree of Man-Machine Coupling Degree

图16 相对最优腿部绑缚系统设置Fig.16 The Setting of Leg Binding System with Relatively High Degree of Man-Machine Coupling
5 结论
通过外骨骼绑缚的模拟仿真实验与样机测试实验,发现绑缚位置的调整可以减小人机耦合运动产生的相互干涉作用力,提高人机耦合程度。绑缚位置的调整可以减小人机耦合运动产生的相互干涉作用力,提高人机耦合程度。大腿处的绑缚位置,当距离髋关节越远时力学性能越好,大腿根部位置不适合绑缚,相对较优的绑缚位置为靠近膝关节处;小腿处的绑缚位置,当距离膝关节越远时力学性能越好,小腿中部位置不适合绑缚,相对较优的绑缚位置为靠近踝关节处与靠近膝关节处。
绑缚数量的增加可以进一步减小人机耦合运动产生的相互干涉作用力,提高人机耦合运动速度,这一点与绑缚位置的作用原理相同。不同的是还可以增大总摩擦力,防止外骨骼相对人体向下滑移导致的轴心偏移现象,避免人机相互干涉运动进一步加剧。但绑缚数量增加到一定程度后对人机匹配度的贡献率下降,而且还会带来阻碍正常肌肉变形、导致穿戴者血压增高与增加整体穿戴时间等影响。人机匹配度相对最高的腿部绑缚系统是在大腿处应选择远离髋关节的区域设置2副绑缚,在小腿处则应选择在小腿靠近膝关节处与靠近踝关节处各设置1副绑缚共2副绑缚。
在本次外骨骼绑缚系统研究过程中并未涉及到绑缚结构,绑缚结构也是绑缚系统中影响人机匹配度的重要因素。未来需要继续研究外骨骼绑缚结构对人机耦合匹配影响,重点探索通过绑缚结构优化设计提升人机匹配度的方法。
