一种新型手腕部粗大训练康复机器人机构设计
2022-11-21张广帅毛志贤王春宝韦建军
张广帅,毛志贤,王春宝,2,3,韦建军
(1.广西科技大学机械与交通工程学院,广西 柳州 545006;2.深圳市老年医学研究所,广东 深圳 518000;3.深圳大学第一附属医院,广东 深圳 518035)
1 引言
据中国卫生组织统计数据得出,我国的老龄化问题日趋严重,脑卒中是老年人主要致残因素,每年新增脑卒中患者200万以上,由于医疗资源紧张,80%以上的脑卒中患者未能得到及时的康复治疗,导致患者肢体运动不便严重影响其日常生活质量[1]。研究证明,患者早期康复训练能够有效促进脑卒中患者神经通路重建,帮助患者早日恢复运动能力[1]。目前针对脑卒中患者手腕关节康复训练过度依赖于康复治疗师,不仅加重治疗师的工作强度,而且受限于治疗师个人临床经验差异,影响患者康复训练效果[3]。伴随康复机器人技术的介入,利用机器人传感器感知脑卒中患者的康复状态,为脑卒中患者康复训练方案制定提供量化依据。
脑卒中患者神经通路受到一定程度的损伤,导致无法进行正常的生理活动,人体上肢特别是手腕关节是重要运动单元,因此帮助脑卒中患者手腕部的康复具有重要意义。但受限于患者早期运动神经损伤的影响,患者早期无法完成精细动作,因此这里提出一种手腕部粗大训练康复机器人实现患者早期康复训练,即将手腕部的精细复杂运动简化为基本的生理运动。粗大训练方式不仅能够帮助患者实现早期运动神经重塑,而且简化康复机器人的结构。国内外专家和学者对手腕部康复机器人做了大量的研究工作。文献[4]研究的轻巧型外骨骼手部机器人在手指处配有三个重叠的钢板弹簧,伺服电机在弹簧之间进行移动,通过其他两个弹簧将力量传递给手指各个关节处,使手指能够感应力量变化,然而该机构复杂,维护成本高昂。美国国家康复研究院研制的穿戴手指康复机器人[5]利用安装在手指外的弹簧使患者进行被动训练,手指外的编码器反馈抓握的力度,在弹簧的作用下完成训练。文献[7]采用齿轮的传动方式,利用齿轮传动效率高等优点设计反馈功能的数据手套,在恢复过程中实现手部的精细治疗。然而,当前手腕部康复机器人以中后期精细运动功能强化为主,机器人的机械结构复杂,使用和维护成本高。
首先分析人体手腕部各关节的生理特征和运动方式,通过手腕部生理特征和运动方式设计手腕部康复机器人的结构,并结合医疗康复理论确定手腕部康复机器人的最佳方案,搭建实验平台验证手腕部康复机器人的可行性。
2 手腕部康复机器人的结构设计
使用三维绘图软件Solidworks 绘制手腕部粗大训练康复机器人的整体模型,如图1所示。总体结构分成三个部分:手指抓握平台、手掌俯仰平台、腕关节旋转平台。
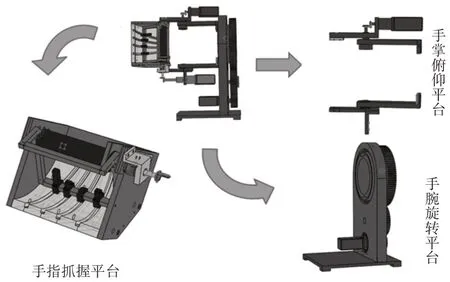
图1 康复机器人的三维模型Fig.1 Motion Model of Rehabilitation Robot
手腕部粗大训练康复机器人三个训练平台分别由伺服电机、执行机构、传动系统、支撑部件、传感器等零部件组成。三个运动平台对应三种自由度运动可以同时实现手指抓握、手掌俯仰和手腕旋转三种运动。腕关节旋转平台和手掌的俯仰平台旋转中心始终保持在一个平面内,避免产生切向力,而且对每个平台都安装了极限限位开关。
2.1 康复设计理论
2.1.1 手腕部生理特征分析
手腕部作为人体行为动作的重要执行单元,主要是由骨骼、肌肉、神经和毛细血管等几部分组成。通过分析手腕部关节结构、运动轨迹和运动角度等各种关节特征,对手腕部粗大训练康复机器人结构合理化设计具有重要意义。通过查阅医学康复资料可知,手腕部关节,如图2所示。由图2可得手腕部主要由腕骨、掌骨和指骨三部分组成。其指骨又分为近端指骨、中指骨和远端指骨,两指骨之间存在着指间关节。可见手指关节结构复杂,有多个自由度,运动情况多变[9-11]。采用静态拍摄的方式测量关节长度和关节间的夹角,如图3所示。采用动态拍摄的方式拟合手指抓握运动轨迹,如图4所示。测量过程中手指运动比较缓慢,可以追踪手腕部运动过程中的每一个姿态。由于手部抓握运动各手指运动轨迹近似,以食指拟合曲线为例。采用加速度传感器和扭矩传感器分别测量手指抓握的运动角度和手指关节力矩变化拟合生成食指指骨运动角度随时间变化曲线和手指关节力矩变化曲线,如图5、图6所示。
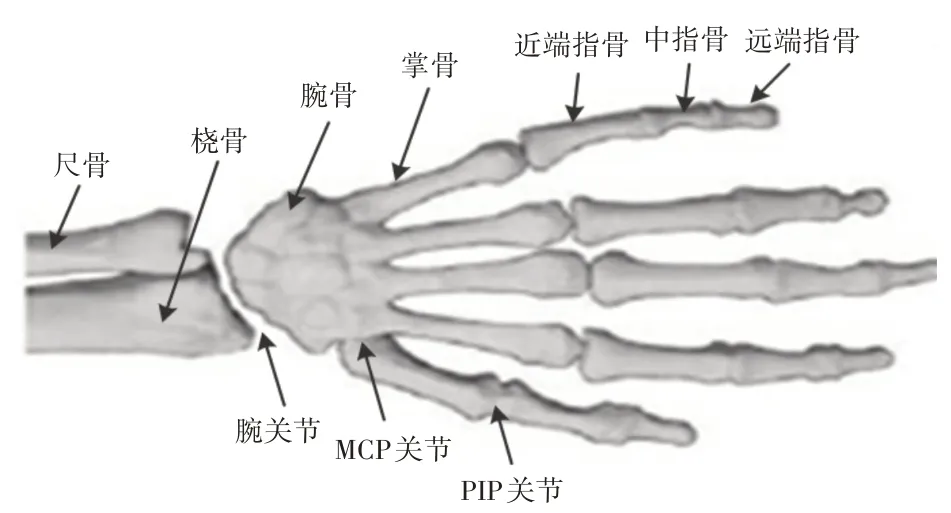
图2 手部关节示意图Fig.2 Hand Joint Diagram
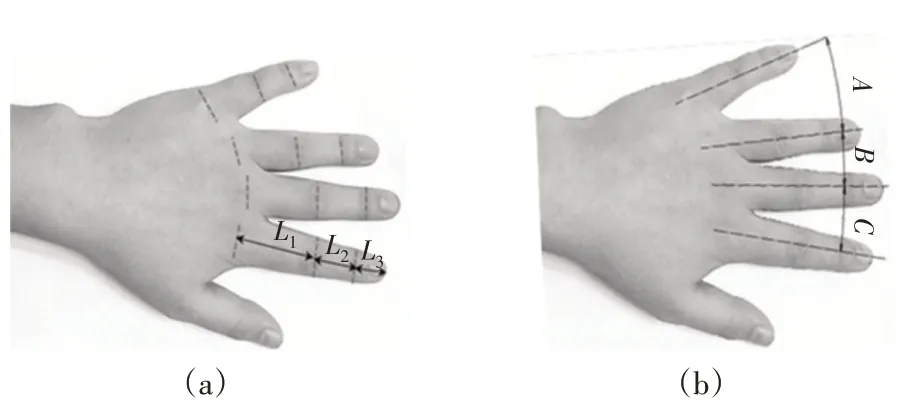
图3 手指静态测量Fig.3 Finger Static Measurement
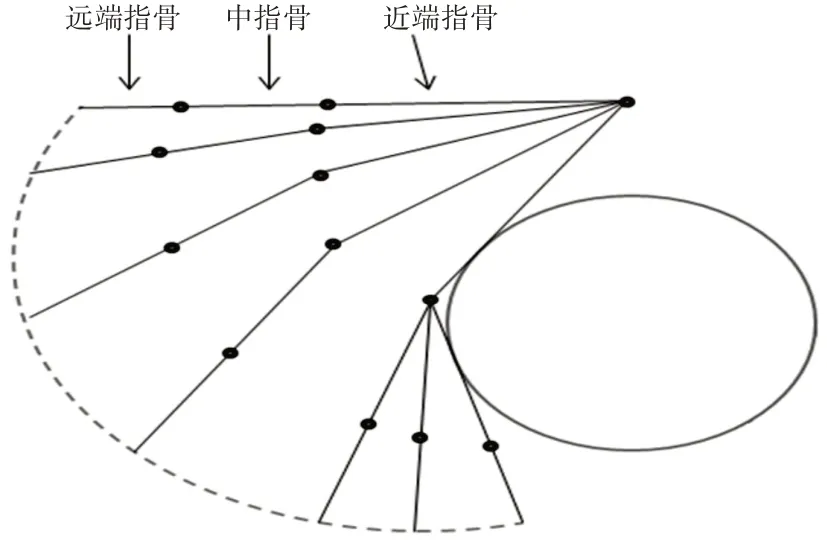
图4 食指的运动轨迹状态图Fig.4 The State Diagram of the Movement of the Index Finger
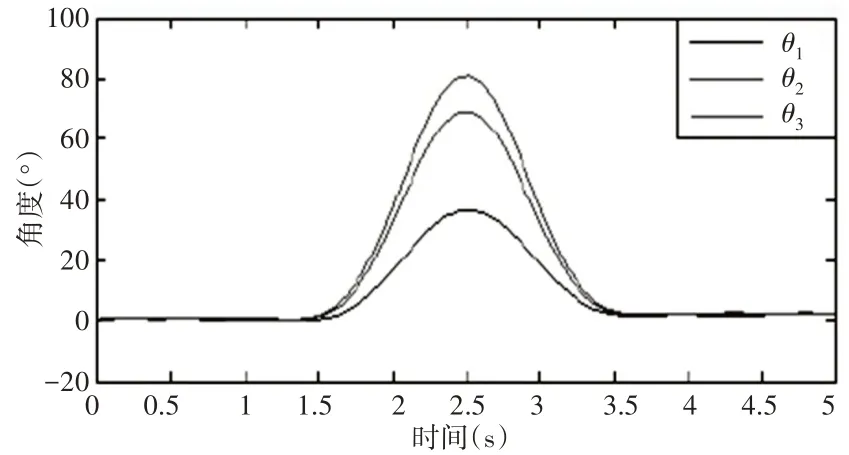
图5 食指指骨角度变化曲线图Fig.5 Curve the Angle of the Index Finger
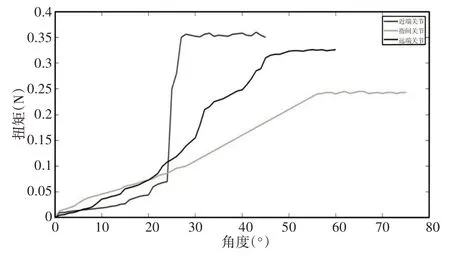
图6 手指关节力矩变化曲线Fig.6 Curve of Moment Change of Finger Joint
2.1.2 测量结果分析和优化
选取10组实验人员参与测量,取手指关节长度和关节夹角静态测量平均值。手指关节长度和夹角测量结果,如表1、表2所示。手指抓握、手掌俯仰和手腕旋转的运动角度,如表3所示。
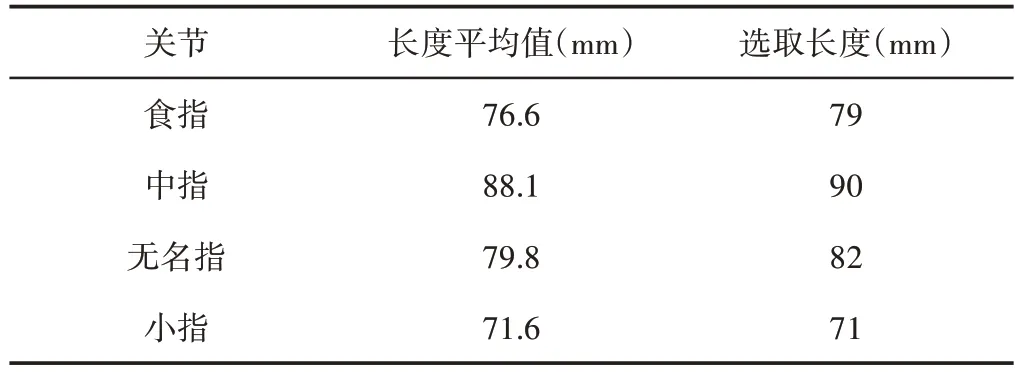
表1 手指关节长度Tab.1 Knuckle Length
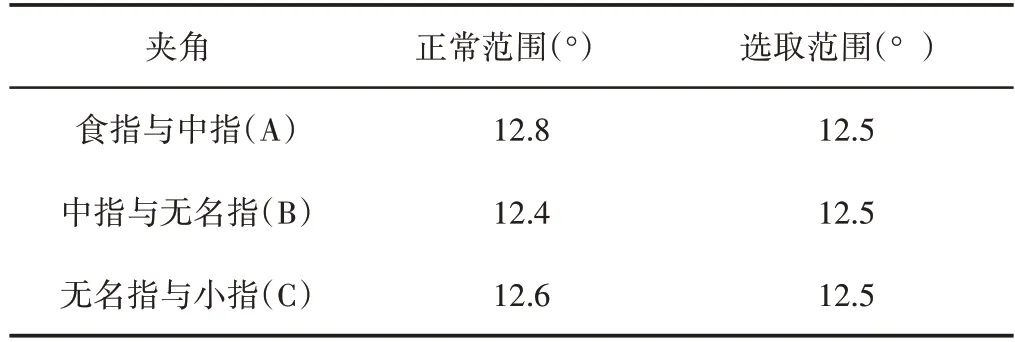
表2 手指夹角角度Tab.2 Finger Angle
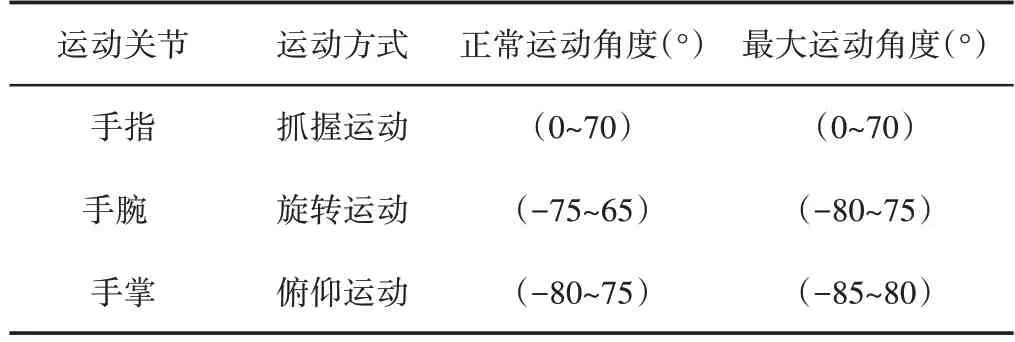
表3 关节运动角度Tab.3 Angle of Joint Motion
基于手腕部关节结构复杂,手指运动情况多变问题,提出粗大训练模式,即将手指多个自由度运动模式简化为单个自由度的抓握运动模式。通过分析手指运动拟合轨迹、手指指骨运动角度、手指力矩变化和关节运动角度等手腕部关节数据为手腕部粗大训练的康复机器人结构设计提供量化依据,并结合医疗康复理论确定最佳的康复治疗方案。设计手腕部粗大康复机器人促进患者早期神经通路重塑,满足患者早期受限于手腕部精细康复训练模式,使患者能够完成手腕部基本生理需求动作。
2.2 手腕部粗大训练康复机器人运动方案
手腕部粗大训练康复机器人分别实现手指抓握运动、手掌俯仰运动和手腕旋转运动。如图7所示,手指抓握平台安装在手掌俯仰平台上,手掌俯仰平台安装在手腕旋转平台上。三个运动平台分别由三个伺服电机M1、M2和M3驱动,三个运动平台同时运动实现手腕部协作运动,单个运动平台运动实现手腕部单关节单项运动。伺服电机M1通过锥齿轮驱动支撑杆带动手指抓握运动、伺服电机M2带动手掌进行俯仰运动、伺服电机M3通过减速齿轮带动手腕旋转运动。

图7 康复机器人运动方案Fig.7 Rehabilitation Robot Movement Program
2.3 手指抓握平台的设计
手指抓握平台,如图8所示。主要由驱动机构、执行机构、支撑机构、传感系统和导向机构组成。通过分析手指抓握运动拟合轨迹和手指运动角度进行合理化设计手指抓握平台。手指抓握平台是手腕部粗大康复机器人的核心运动平台,其功能特点是将手指不确定多自由度运动简化为单个自由度抓握运动,即实现平台对手指的粗大抓握训练模式。手指抓握平台粗大训练模式解决患者早期受限于手腕部精细康复训练模式,通过粗大训练模式促进患者神经重塑,实现基本的日常行为活动。
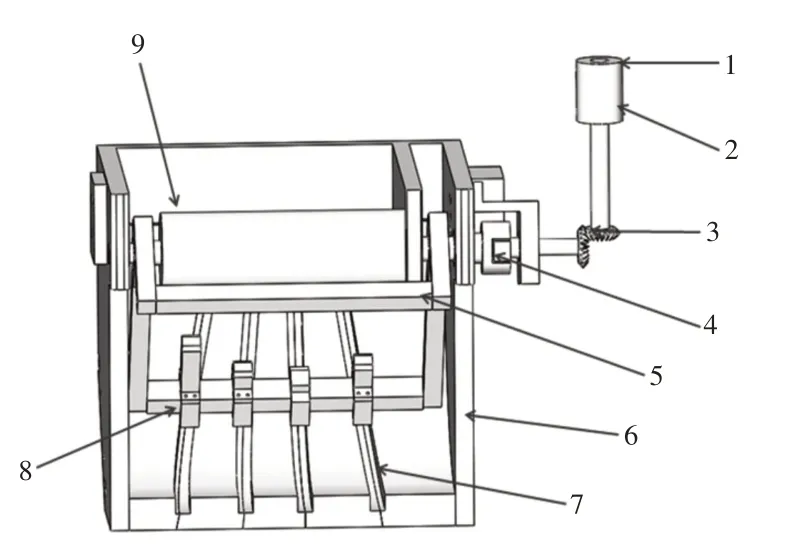
图8 手指抓握平台Fig.8 Hold the Platform with Your Fingers
2.3.1 牵引滑块设计
手指抓握平台运动特点实现四个手指同时抓握,但手指长度不一导致无法实现,这里提出解决方案是采用如图9所示的不同长度的驱动滑块,滑块的长度如表1所示的数据可得。因此采取中指滑块长度最短,而小指滑块的长度最长。通过采用不同长度的牵引滑块解决手指抓握运动角度不一问题。而在滑块末端都加工留有一个球形端头,减少牵引滑块在滑动过程产生的摩擦阻力,使运动过程顺畅。
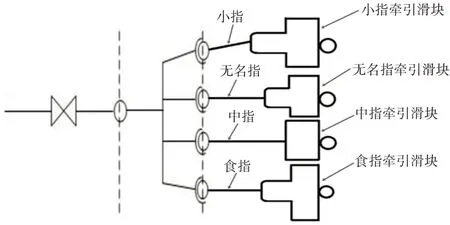
图9 牵引滑块Fig.9 Pulling the Slider
2.3.2 牵引滑槽设计
牵引滑槽的设计准则符合手指运动轨迹和手指间夹角。静态测量手指夹角角度,如表2所示。手指运动轨迹,如图4所示。通过对比手指指间夹角和手指运动轨迹特征,确定牵引滑槽的初始值。结合康复医学理论确定滑槽最终值,牵引滑槽,如图10所示。
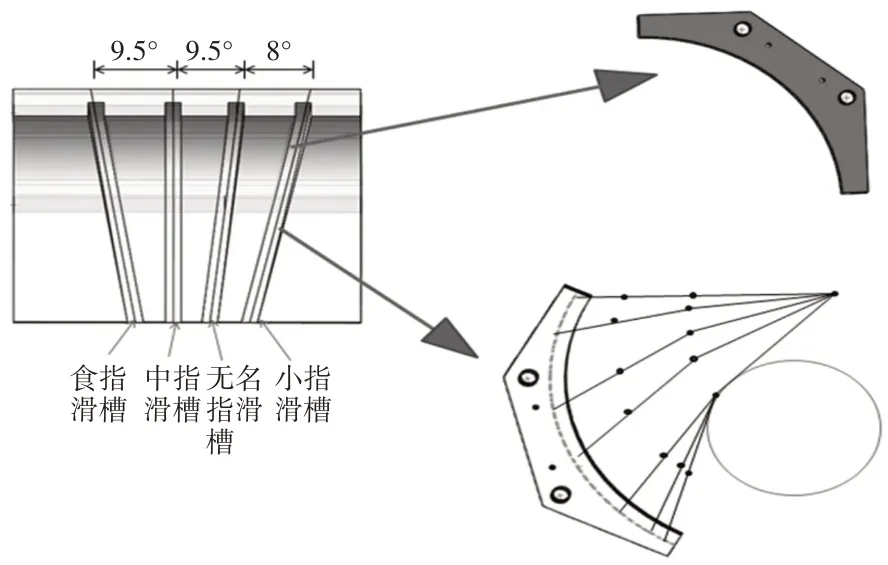
图10 牵引滑槽Fig.10 Drawing Chute
2.3.3 执行机构
手指抓握平台执行机构,如图11所示。主要由支撑杆、支撑板和滑动槽组成,伺服电机通过锥齿轮驱动支撑杆带动手指牵引滑块完成手指抓握运动,支撑杆是执行机构的主要传动装置,保证其刚度防止产生变形。

图11 执行机构Fig.11 Executing Agency
手指抓握平台主要解决手指多自由度不确定运动问题和患者早期手腕部康复训练不确定问题。通过手指抓握平台康复训练将手指多自由度运动简化为单自由度抓握运动,促进患者早期神经重塑,满足日常生理需求活动。手指抓握运动平台解决了手腕部康复机器人结构复杂问题,实现患者早期康复训练。手掌俯仰运动平台和手腕旋转运动平台的设计与手指抓握平台类似,这里不再进行赘述。
2.4 直流伺服电机的选型
手指抓握平台的三种运动状态,如图12所示。初始状态A=0°,运动状态B=α°、极限状态C=-70°。
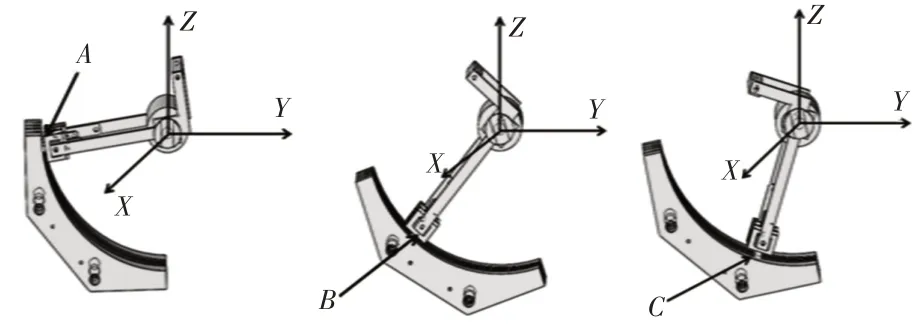
图12 运动状态Fig.12 State of Motion
伺服电机以均匀的速度从A点到C点,则角速度ω:
由力矩传感器所测得的力矩T:

机构之间存在着摩擦等一些不确定的因素,功率P在计算中采用三倍余量。
功率P:
通过功率和转矩对伺服电动机进行选型,这里选用的伺服电机为MT8N57PXXVXE的直流伺服电机。
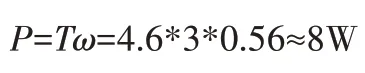
3 控制平台系统控制方案
控制方案,如图13所示。控制平台由传感器、电源、软件平台、变送器等几部分组成。控制平台控制手腕部粗大训练康复机器人进行康复训练,而安装在康复机器人上的力矩传感器和编码器输出变化对患者的实际情况进行实时反馈至控制平台上。将反馈结果与目标结果对比分析为偏瘫患者下一步治疗提供量化的依据。
图13 控制总体方案Fig.13 Overall Control Scheme
3.1 控制平台控制过程描述
控制系统包括两种训练模式,主/被动训练。患者被动训练时,手腕部不参与任何的运动,手腕部视作附加在手腕部康复机器人的定量载荷,此时力矩传感器的力矩T1等于驱动手指各关节总作用力;与被动训练模式不同,进行主动训练时,患者手腕部有意识的进行训练,此时患者与康复机器人之间将会产生相互作用力,此时力矩传感器的力矩T2等于手指关节主动输出力矩减伺服电机施加力矩。
控制系统流程,如图14所示。控制平台被动训练时,手腕部不参与任何运动,通过控制器控制康复机器人驱动器驱动伺服电机以被动训练方式进行运动,编码器整个运动变化和力矩传感器力矩变化实时反馈到控制平台上,通过输出力矩变化和运动轨迹变化对患者情况对比分析,为患者康复提供量化依距。与被动训练方式不同,主动训练方式是患者有意识的进行主动训练,伺服电机与手指关节产生相互作用力,力矩传感器将输出变化实时反馈至控制平台上,通过力矩曲线输出变化对患者康复情况实时反馈。通过主动/被动训练模式下的实时反馈对患者康复情况,结合康复医学理论制定下一步康复方案。
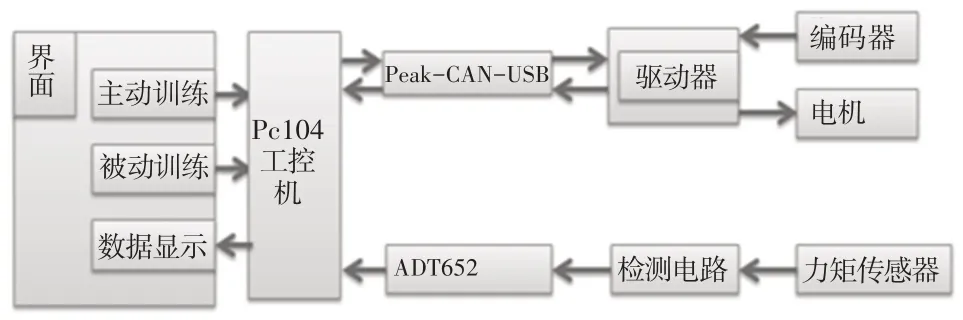
图14 控制系统平台流程图Fig.14 Control System Platform Process
4 手腕部康复机器人的可行性
手腕部粗大训练康复机器人的样机,如图15所示。选取实验者的右手进行上机实验。这里比较手腕部主/被动模式下的速度曲线、位置变化曲线和扭矩变化曲线。由于实验采用同一训练平台,因此,主/被动模式伺服电机的运动速度和运动轨迹保持一致,减少其他变量的影响。两种运动模式下手腕抓握、手掌俯仰和手腕旋转的速度、位置曲线相近。下文重点对比分析主/被动模式下力矩的变化。
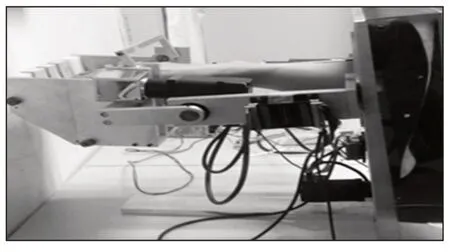
图15 手腕部粗大训练康复机器人的样机Fig.15 Prototype of Wrist Training and Rehabilitation Robot
4.1 手指抓握主/被动实验
手指抓握运动实验平台,如图16所示。预先设置初始状态α=0°,手指最大运动角度α=-70°,完成了30 个周期的主/被动训练,训练频率选择30次/min,2s完成一个训练周期,伺服电机转速选择13.3r/min。
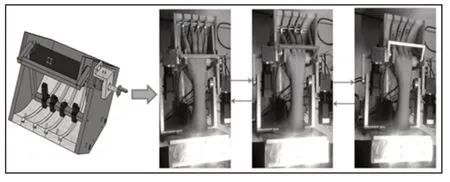
图16 手指抓握运动实验平台Fig.16 Finger Grasping Motion Experiment Platform
实验开始前,手指平放在手指抓握平台上,即初始状态α=0°,手指紧扣牵引滑块,手掌握住握杆。按下启动按钮,伺服电机驱动与支撑杆相连接的牵引滑块带动手指进行抓握运动。测试实验进行主/被动两种模式下抓握运动,当抓握运动过程结束后,记录实验数据并选取其中完整的4个训练周期分析实验结果。
手指抓握速度曲线,如图17(a)所示。可得速度变化曲线在10s、20s、30s等时间段出现波动,其原因是选用的伺服电机速度响应快,伺服电机在变向初始阶段出现波动现象,在波动后变较快达到稳定状态,曲线符合预期的效果。手指抓握运动曲线如图17(b)所示可得手指抓握在(0~-70)°范围内呈现正弦变化曲线,整个抓握周期运动平稳,手指抓握粗大训练实际运动曲线符合手指抓握预先设定运动轨迹,运动效果优良。扭矩变化曲线,如图17(c)、图17(d)所示。主/被动模式下力矩传感器输出的扭矩大小不同,被动训练模式输出的力矩为伺服电机驱动手指关节的力矩,而主动模式输出力矩是手指关节的主动驱动力减伺服电机驱动手指关节的力。通过力矩变化曲线可看出被动力矩大于主动力矩,是由于主动训练模式下手指关节与伺服电机产生相互作用力会减少部分力矩作用。主/被动模式下的力矩曲线波动现象明显,其原因为在两种运动模式下,实验者手部运动惯性思维对实验结果产生一定的影响,导致力矩变化曲线出现波动。换向初始阶段,力矩传感器受到相反的作用力,波动起影响大,随着实验进行,力矩变化曲线较快达到平稳状态。实验结果表明,力矩传感器实际输出力矩变化符合预先设定输出力矩,通过力矩曲线变化实现对患者恢复情况的实时反馈。
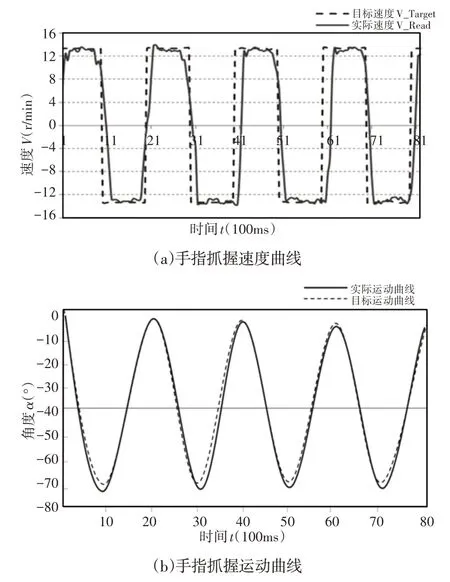

图17 手指抓握主/被动测量结果Fig.17 Grasp the Main/Passive Measurement Results with Your Finger
4.2 手腕旋转主/被动实验
手腕旋转运动平台,如图18所示。手腕旋转运动完成了30个周期的主/被动训练。内旋极限角度为β=75°,外旋极限角度为β=-75°。训练频率选择15次/min,4s完成一个训练周期,伺服电机的转动频率16r/min。
图18 腕关节旋转平台Fig.18 The Wrist Rotates the Platform
实验开始前,手掌握住握杆,伺服电机通过减速齿轮带动腕关节旋转平台运动。当测试实验结束后,记录实验数据并选取其中完整的4个训练周期分析实验结果。
腕关节速度曲线,如图19(a)所示。伺服电机速度变化在±1r/min范围内,伺服电机20s、40s、60s等时间段变向,变向后迅速达到平稳状态。运动位置曲线,如图19(b)所示。手腕旋转运动位置在(-75~75)°范围内呈现正弦变化,实际运动位置变化曲线符合目标位置变化曲线。实验结果表明,伺服电机运动速度符合手腕旋转速度,手腕部粗大训练康复机器人手腕部运动位置符合人体手腕部运动位置。
扭矩变化曲线,如图19(c)、图19(d)所示。主/被动模式下力矩传感器输出的扭矩大小不同,被动训练模式下输出的力矩是伺服电机驱动腕关节力矩,而主动模式输出力矩是腕关节主动驱动力减伺服电机驱动力矩,此时被动输入力矩大于主动输出力矩,由于主动训练模式下手腕旋转力矩会抵消部分伺服电机产生的力矩。主/被动模式下的力矩变化曲线波动小,其原因是两种运动模式下,实验者腕关节波动较小,对实验结果影响较小。而换向初始阶段,力矩传感器输出曲线变化大,而变向后迅速达到平稳状态。实验结果表明,通过主/被两种模式下输出力矩变化可以检测患者的主/被动训练意识,对患者实际情况进行实时反馈值控制平台上。
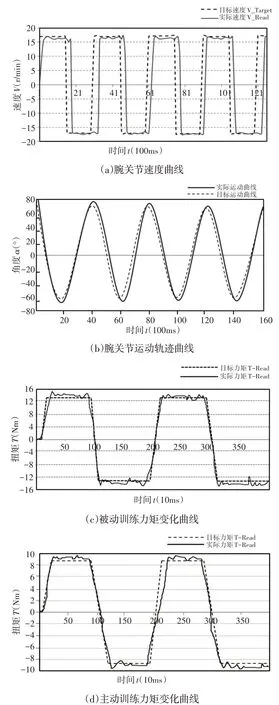
图19 腕关节主/被动测量实验Fig.19 Wrist Joint Master/Passive Measurement Experiment
4.3 手掌俯仰主/被动训练
手掌俯仰运动平台,如图20所示。在实验过程中手掌俯仰完成了30个周期的主/被动训练,手掌仰角极限角度为θ=80°,手掌俯角极限角度为θ=-85°。训练频率选择15次/min,4s完成一个周期训练,伺服电机的转动频率16r/min。
图20 手掌俯仰运动平台Fig.20 Palm-Pitch Motion Platform
手掌俯仰平台伺服电机带动手掌进行俯仰训练,当测试实验结束后,记录实验数据并选取其中完整的4个训练周期分析实验结果。由于手掌俯仰主/被动训练与手腕旋转主/被动训练变化曲线相近,这里不在赘述。
综上所述,有实验结果可知,手腕部粗大训练康复机器人三个运动平台的运动位置、运动轨迹符合人体手腕部运动状态,可以实现手腕部粗大训练模式,解决了患者早期受限于手腕部不能进行精细训练的影响,而手腕部粗大训练康复机器人输出力矩变化可以对患者手腕部运动状况进行实时反馈,通过力矩反馈变化以便给患者制定下一步康复训练。
5 结论
这里基于脑卒中上肢康复训练需求,并结合大量康复医学理论,开发了手腕部粗大训练康复机器人。通过分析人体手指的各个关节结构和运动状态,利用运动集成的方法,完成集成手指同时抓握、手掌俯仰和手腕旋转功能的手腕部康复机器人。结合手腕康复训练需求,搭建融合主/被动训练模式的机器人控制系统,对患者在运动过程中的运动意图和康复情况进行实时的反馈,进行实验验证手腕部康复机器人的机械结构和控制过程可行性。实验结果表明,手腕部康复机器人的运动位置和运动轨迹符合人体手腕部实际运动状态,力矩变化反映患者手腕部运动意图,进而对患者下一步康复治疗提供量化依据。
