高速锥齿轮行波共振的应力间接测量方法研究
2022-11-21侯飞
侯 飞
(山西大同大学,山西 大同 037009)
1 引言
高速锥齿轮作为动力装置内关键部分的发动机附件传动系统,若出现失效等故障,极易造成发动机的断电与断油等问题,甚至引发重大事故,威胁到人们的生命及财产安全[1]。中央传动锥齿轮作为与发动机附件相匹配的关键部件之一的中央传动锥齿轮,属于一种高速锥齿轮,长时间运行于负荷较大、转速高、温度较高等恶劣环境中,其盘形结构出现节径型行波共振现象的几率较高,易导致其出现开裂与失效等问题,对于发动机的整体安全运行造成威胁[2-4]。因此,研究一种恰当且方便的测量方法,及时有效地测量出高速锥齿轮的此类节径型行波共振现象,为尽早发现高速锥齿轮的运行行波共振问题,避免其发生开裂及失效等故障提供有效保障[5]。
应力间接测量是在其他测量方法的基础上,结合如脆性涂层法、光测法以及电测法等方法实现的测量,此种测量方法应用范围较广,具有简单、效率高、结果可靠性高等特点[6]。其中,电测法作为其诸多方式中较为常用的方式之一,主要采用应变片的方式实现对测量试件的实时监测[7]。基于以上分析,这里研究一种高速锥齿轮行波共振的应力间接测量方法,通过分析高速锥齿轮的行波共振原理,设计锥齿轮的3D 运算模型与测量方案,方案中结合了声波导管与电阻应变计两种方式,实现对高速锥齿轮行波共振的应力间接测量,为及时发现高速锥齿轮节径型行波共振问题、防止其产生开裂与失效等故障奠定科学基础。
2 高速锥齿轮行波共振的应力间接测量方法
2.1 高速锥齿轮行波共振原理
高速锥齿轮具有类似于轮盘的形状,产生节径型振动的概率较高。与锥齿轮转向相反旋转的被称之为后行波,反之称之为前行波,通过累加统一形状的前、后行波形成节径型振动[8]。当波转过时锥齿轮盘上的各个点产生起伏振动,此即为锥齿轮行波振动,当前行波与后行波在某一特定频率时,锥齿轮的行波共振就会出现。
锥齿轮的圆盘面被节线或者节径划分为多个扇区,且所划分的数量为偶数,可将锥齿轮行波振动看作是扇形振动。其中处于前后两个扇区的各个点的振动方向相反,而处于相同扇区内的各个点的振动方式为同一相位轴向振动[9]。当锥齿轮相对坐标系为静止状态时,锥齿轮辐板不同点的振动位移可表示为:

式中:C(r)—位移半径最大位移幅度;t和n—时间与节径数;l—圆盘的横向位移;σ和φ—扇形振动角频率与圆周角。
当锥齿轮相对坐标系为旋转状态时,可依据三角函数或者指数形式将式(2)分解,分解后表达式为:

通过式(2)可获知,锥齿轮辐板节径型振动可划分成旋转方向相反的前行波与后行波振动,且二者不受时间改变的影响,具有统一的振动幅度。
从动锥齿轮n节径的前行波与后行波共振运算式可表示成:

式中:N2—主动锥齿轮转速;fb—从动锥齿轮的节径型振动动频;fg和fd—齿轮的前、后行波振动频率;h—主动与从动锥齿轮的传动比,且h=,其中,X1和X2—二者的齿数。
锥齿轮产生节径型行波共振的必要因素包括:(1)锥齿轮的特定振动频率所处坐标系与激振力频率相同;(2)锥齿轮的前行波振动频率与锥齿轮激振力频率相同,后行波振动频率与激振力频率一致,可表示为:

式中:fe—激振力频率;(3)激振力作用到锥齿轮上的功属于正功。结合式(3)与式(4)后,在从动锥齿轮的行波共振的条件下,获得了主动锥齿轮的转速:

式中:“-”与“+”—前、后行波时频。
从动锥齿轮的行波共振转速以N1表示,其运算式为:

从动锥齿轮的扭矩运算式为:

式中:P和T—转轴输出功率与从动锥齿轮扭矩。
2.2 行波共振的应力间接测量
2.2.1 齿轮3D模型
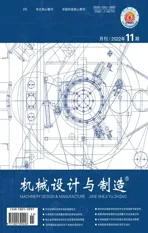
以齿轮的关键几何尺寸参数为依据,构建主动、从动、以及啮合齿轮模型。以从动锥齿轮为例,通过Ansys软件内的网格划分生成网格,自行划分出数个区间,并实施扫掠分网,划分后的节点总数为620186个,从动锥齿轮3D模型,如图1所示。
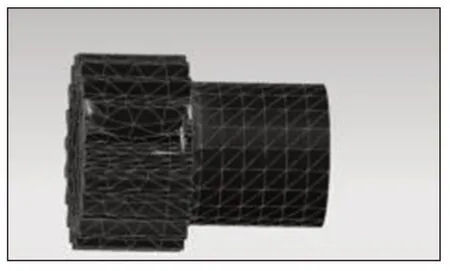
图1 从动锥齿轮3D模型Fig.1 3D Model of Driven Bevel Gear
通过模态求解从动锥齿轮之后,选取(1~14)阶模态,并提取出动锥齿轮的一节径~五节径模态振型。
2.2.2 测量方案
通常在锥齿轮未出现行波共振的情况下,其附近仅存在非常低的声信号能量;而当锥齿轮产生行波共振时,会导致其振动幅度瞬间升高,由此激发其附近的空气分子大量生成声信号,造成声能量突然增大。基于此种现象,针对箱体中齿轮辐板周围的声信号能量变化情况可选取导出式噪声测量方法实施检测,并以此为依据获取到发生行波共振前后的行波频率,将锥齿轮的共振动频与转速确定[10]。导出式噪声测量方法主要包括声波导管、声传感器及数据采集仪等。在实施测量过程中,先将齿轮箱侧的安装板处打开一个孔,向该孔内插进声波导管,并令其管口与锥齿轮的幅板相对;在声波导管内放置声传感器,因锥齿轮转动过程中,齿轮箱中油雾量极高,可通过将长度为4mm的海绵放置于声波导管的两端管口内,避免油雾进入声波导管内干扰声传感器与最终的测量精度。导出式噪声测量方法的结构设计情况,如图2所示。

图2 导出式噪声测量结构Fig.2 Derived Noise Measurement Structure
其中,声波导管的截止频率可表示为:

式中:r'和a0—声波导管的半径与空气内的声速。
当声源频率比声波导管截止频率高时,高次波出现在声波导管内,此时的声场较为烦琐;在低频声导管截止频率条件下,声源在导管内所形成的声场是平面简单波声场。
从动锥齿轮行波共振应力测量方案主要由引线方案设计、应变计与测量点位置的选取、引电器安装等部分构成。其中引电器安装部分应先设计出转接段,将引电器的转动件与转接段相连,然后将引电器机体装在引电器转接座上;焊接引线与应变计粘贴位置的选取,应以激振频率分布为依据,选出锥齿轮辐板面将会出现行波共振模态的应力集中区域;测量点位置的选取是锥齿轮行波共振应力间接测量的关键,由于通常情况下,锥齿轮节径型振动的应力均为径向分布,且应力最高位置大多位于齿根槽处,故测量点位置选取在齿轮辐板小端与齿根接近位置,且各个测量点均顺着圆盘方向分布并具有统一的径向位置,将应变计粘贴在各个测量点上;引线的设计方案为将其铺设于锥齿轮辐板面,经由底端面到达齿轮轴内并顺着锥齿轮轴内壁向上方牵引,分别由固定传动轴与正中传动花键轴通过后,经由传动轴向外延伸,焊接到此轴的引电器接线盘上,信号通过引电器传输到动态应变仪实施测量与统计分析。
3 实验结果分析
为了验证这里研究的高速锥齿轮行波共振的应力间接测量方法的有效性,选取某公司生产的中央传动锥齿轮作为实验锥齿轮,如图3所示。
图3 实验锥齿轮Fig.3 Experimental Bevel Gear
运用所提方法对其行波共振特性实施应力间接测量,通过所得测量结果分析所提方法实际应用性能。运用所提方法对处于三、四节径行波共振转速下的实验锥齿轮辐板处等效应力实施测量,通过所得测量结果分析其应力分布状况。设定三节径与四节径转速下的扭矩与转速作为边界条件,其中,实验锥齿轮转轴的输出功率为210kW,四节径的后行波动频区间为(13231~13427)Hz,相对的主动锥齿轮转速区间为(101.7~105.3)%;三节径的前行波动频区间为(7830~8021)Hz,相对的主动锥齿轮转速区间为(73.1~77.3)%;所使用材料为210℃下的物理参数,依次为泊松比0.42、弹性模量211GPa、密度(7.87×103)kg/m3,获取到实验锥齿轮在三节径与四节径转速下正面及背面辐板应力分布云图,如图4所示。

图4 三、四节径行波共振下实验锥齿轮的正面与背面辐板应力Fig.4 The Stress of Front and Back Spokes Plate of Experimental Bevel Gear Under Three and Four Section Traveling Wave Resonance
通过图4(a)、图4(b)可看出,当实验锥齿轮处于三节径行波共振下时,其应力主要集中在轮齿的齿根弯曲处,其辐板面接近于圆形,与辐板的整个应力分布区间相对应的劣弧上具备数个轮齿,且应力集中在处于弧端位置的齿根处,正面辐板与背面辐板的最高应力分别为85.8MPa 与205.3MPa,正面辐板应力明显比背面辐板低;通过图4(c)、图4(d)可看出,当实验锥齿轮处于四节径行波共振下时,应力同样集中在其轮齿的齿根弯曲处,而对应于其辐板整个应力分布劣弧上的轮齿数量高于三节径转速时,另外此处应力依然集中于其劣弧弧端处齿根位置,且正面辐板应力仍旧比背面辐板低,二者的最高应力依次为235.5MPa与637.8MPa。
依据所提方法的测量点选取方式并结合以上实验分析结果,由实验锥齿轮上选取出4个测量点,并在各个测量点上粘贴好应变计,实施对实验锥齿轮行波共振的应力间接测量。实验锥齿轮测量点应变计粘贴位置,如图5所示。

图5 测量点应变计粘贴位置图Fig.5 Pasting Location of Strain Gauge at Measuring Point
以测量点5为例,通过所提方法对四、五节径行波共振模式下此测量点的动频、行波共振转速以及动态应力实施10 次测量,所得测量结果统计情况,如图6所示。分析图6可知,通过所提方法对不同节径行波共振下的同一测量点实施数次测量,所得的相同节径行波共振下的动频、行波共振转速以及动态应力结果均较为相近,波动趋势较小,由此可知,所提方法的测量结果较为精确,误差波动范围非常小,可满足高速锥齿轮行波共振测量需求。


图6 四、五节径行波共振下测点4多次测量结果统计图Fig.6 Section 4 and Section 5 Statistics of the Results of Multiple Measurements at the Measuring Point 4 Under the Track Wave Resonance
在实验锥齿轮高速旋转状态下,全转速区间内具备一~五节径五种行波共振模式,现通过所提方法测量各种模式下锥齿轮4个测量点的振动响应情况,统计不同节径行波共振下各测量点的峰值振动响应,如表1所示。

表1 不同节径行波共振下各测量点的峰值振动响应Tab.1 Peak Vibration Responses of Measurement Points under Resonance of Traveling Waves with Different Pitch Diameters
分析表1能够得出,通过所提方法可测得不同节径行波共振模式下齿轮上各测量点的动频、行波共振转速以及动态应力,由测量结果可知,各测量点的峰值振动响应均出现在三节径前行波、五节径后行波以及四节径前、后行波振动模式下;实验锥齿轮可具备多种节径行波共振模式,最高分频动态应力可达到116MPa,出现在测量点1与测量点4的五节径后行波位置。
4 结论
高速锥齿轮运行中的节径型行波共振易导致其发生开裂与失效等故障,为避免此类故障的发生,提出高速锥齿轮行波共振的应力间接测量方法,在分析高速锥齿轮行波共振原理的基础上,构建高速锥齿轮的3D运算模型,并结合声波导管噪声测量与电阻应变计测量两种方式,设计应力间接测量方案,实现对高速锥齿轮行波共振的应力间接测量。实验结果表明,当待测锥齿轮处于三、四节径行波共振模式时,其应力集中于辐板与齿根弯曲处,且辐板正面应力比背面低,四节径行波共振下应力比三节径高;待测锥齿轮上各测量点的峰值振动响应均在三节径前行波、五节径后行波以及四节径前、后行波振动模式下出现,且最高分频动态应力可达到116MPa,出现在测量点1及测量点4的五节径后行波处;所提方法可测量出锥齿轮不同节径型行波共振下的转速、动频及动态应力,测量结果误差波动范围小,能够满足高速锥齿轮行波共振特性的测量需求。