一种POC集构造的AGV并联机构卸运装置
2022-11-21杭鲁滨黄晓波郭为忠
韦 梁,杭鲁滨,黄晓波,郭为忠
(1.上海工程技术大学,上海 201600;2.上海交通大学机械与动力工程学院,上海 200240)
1 引言
现代城市存在着多种对车辆的搬运需求,自动化停车场中对车辆的搬运,城市中对违章车辆的搬运以及道路上对故障抛锚车辆的救援,这些都产生了对自动停车机器人的市场需求。与此同时,这些搬运需求在诸多关键技术上具有通用性。当前的车辆多采用人工操纵方式进行搬运,这使得道路故障车辆的救援效率以及停车场的有效使用都难以提升。
这些需求吸引了国内外工程界的关注。我国的一些大中城市正在发展基于自动停车机器人(AGV)的智能停车场,形成了对自动停车机器人的巨大需求。针对自动停车及搬运需求,目前已经形成了包括以群机器人方式进行搬运的Avert,运用悬臂梁进行承载搬运的Serva机器人,国内深圳的怡丰梳齿式抬车机器人在内的多种汽车搬运方式,这些搬运方式都具有各自的特点。
Avert群机器人工作灵活,可以在任意方向上移动,如图1所示。但驱动器功率密度受限,体积较大,使它较难适用于搬运底盘过低的车辆;工作过程中多机器人间的定位,协同运作,存在较高的难度;由于采用mecanum 轮,对地面平整度的要求比较高。Serva抬臂式机器人搬车速度快,但抬车悬臂在受重力时会产生弯曲,在搬运重量较大的车辆时,会对车辆的水平度造成影响,在极限情况下会导致车辆的滑落,如图2所示。我国怡丰公司的抬车机器人移动速度快,但是需要专门的平台使用梳齿式抬升装置将车辆放置在搬运机器人上,造成停车场地基的改变,如图3所示。除此之外,日本也有一种与Avert类似的智能合作搬运群机器人工作灵活,但缺点是占据的两侧空间大,如图4所示。现有的停车机器人,对于抬举不同轴距的车辆,调节量比较小,难以做到自适应的调整。一些汽车价格昂贵,对于平台的稳定性要求较高,而现有的AGV,当车辆被托举后,无法对车辆的水平度和稳定性进行调节。

图1 Avert机器人Fig.1 Avert Robot

图2 Serva机器人Fig.2 Serva Robot

图3 怡丰机器人Fig.3 Yifeng Robot
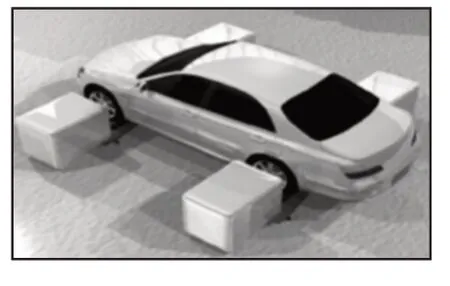
图4 智能合作搬运机器人Fig.4 Intelligent Cooperative Robot
这里通过被搬运车辆需求分析,得到动平台所需的平移和旋转模式,将AGV搬运车辆时,托举叉臂与轮胎接触处的相对运动抽象为运动副,再进一步将车辆底盘抽象为并联机构动平台,AGV 车体抽象为静平台,将搬运机构的每一个部分抽象为并联机构的支链。通过以上分析提出了基于并联机构方位特征集设计的一种AGV托举机构。
2 AGV托举机构的结构设计
2.1 AGV托举路机构的方案思路
根据实际调研,给出AGV托举机构的需求分析,如表1所示。
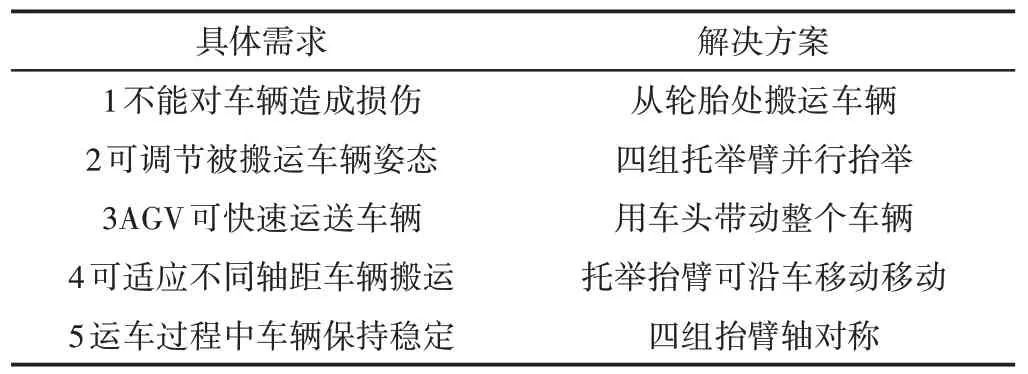
表1 AGV托举机构的需求分析Tab.1 Demand Analysis of AGV Lifting Mechanism
2.2 AGV托举系统设计
结合1.1 中的AGV 需求分析和解决方案,提出了AGV 总体设计方案:由车头牵引整个车辆的前进与转向,叉臂可沿车体移动来适应车辆的不同轴距,AGV 采用四组抬车臂对轮胎进行托举,如图5所示。

图5 AGV托举车辆的总体设计思路Fig.5 The General Design Concept of AGV Lifting Vehicles
2.3 AGV托举装置的转动与平移分析
这里的AGV 方案以四组对置抬臂实现Avert对轮胎的灵活接触,以四组抬臂上的抬车臂代替Serva两抬臂的工作,提出了抬举机构期望功能和操作模式映射为并联机构的方法,并基于方位特征集提出了一种AGV新型托举机构。在确定了AGV托举机构的基本结构后,为了满足设计要求的对于车辆水平度的期望调节功能,现对车辆进行受力的运动趋势分析,确定并联机构所需要满足的对于平移和转动的数目。车辆所受的力和转矩及平移转动分析,如图6所示。

图6 车辆所受的力和转矩及平移转动分析Fig.6 The Analysis of Force,Torque,Translational and Rotation of the Vehicle
在搬运中,被搬运车辆存在y,z方向上的移动,以及Mx和My方向的转矩;设计的整体托举并联机构需要具有两转动两平移,实现对被搬运车辆的姿态调节,即需要进行拓扑结构综合,设计一种两平移两转动(2T2R)机构。
3 运动副等效与搬车并联机构模型
抬车叉臂与轮胎接触状态、相对运动分析是设计并联机构的关键,根据叉臂与轮胎接触的位置和状态,这里提出将叉臂与轮胎接触点抽象为一个运动副;通过对接触点与抬车叉臂相对运动的分析,确定将其抽象为何种类型的副,该运动副抽象为支链的末端运动副,使得托举支链、被搬运车体运动副连接;由此,AGV车体抽象为静平台,被搬运车辆抽象为动平台,抬车装置的整个结构抽象为连接动平台和静平台的支链。
3.1 接触处相对运动抽象为运动副的分析
AGV对车辆轮胎的托举,是按照前轴轮胎,后轴轮胎的先后顺序进行托举。在对车辆前轴轮胎托举时,车辆尚未完全固定,前轮可以随着车轴转向,且轮胎与抬车臂存在一定的斜度。在托举前轴的两个轮胎时,由下图可知,托举前轴轮胎时,没有其他方向自由度的限制,鼓形轮胎与滚子叉臂接触处,存在Mx,My,Mz三个相对转动,与球副的三个自由度等效,即将抬车叉臂与轮胎的接触处抽象为球副,如图7所示。作为前抬臂支链的末端运动副。

图7 前轴轮胎接触处抽象为球副Fig.7 The Position Contact to Front Axle Tyre is Abstracted as Spherical Pair
汽车后轴的轮胎只能绕自身圆心转动,不能随着后轴转向,且后轴轮胎在前轴轮胎之后托举,车辆的自由度已经受到了AGV的限制,后轴的轮胎只存在绕自身轴心旋转的Mx的相对转动。由于只存在一个旋转的相对转动,可以将后轴的轮胎接触点抽象为R副,如图8所示。作为后抬臂支链的末端运动副。

图8 后轴接触处抽象为转动副Fig.8 The Position Contact to Rear Axle Tyre is Abstracted as Revolute Pair
3.2 搬车模型整体抽象为并联机构
对车辆进行搬运时,AGV车体处于静止状态,可以将AGV车体抽象为并联机构的静平台。被搬运的车辆处于运动状态,并且由支链对其水平度进行调节,可以将被托举车辆的底盘抽象为并联机构的动平台。考虑到结构设计的易于实现,驱动的便捷性,支链采用移动副驱动。并联机构动平台需要两转动两平移,机构有4个支链,下面将详细叙述基于方位特征集和机构拓扑学设计期望的搬运并联机构。
4 2T2R托举并联机构的型综合
4.1 确定期望得到的POC集
由上可知,机构期望输出为两平移两转动,即:

式中:t2(⊥R)—两个移动;r2(∥⋄(R,R*))—两转动。
4.2 确定支路的拓扑结构类型
已知Mp,由Mbi⊇Mpa,支路末端构件的POC集为:

4.3 确定支路组合方案
利用SOC支路,可综合得出所需要的组合,如表2所示。

表2 SOC支路的结构类型Tab.2 The Type of SOC Branch
为满足轮胎与叉臂的接触需求,选取支链类型为:
支路1和2:SOC{-Pi1⊥Ri2∥Ri3⊥Ri4-}(i=1,2)
支路3和4:SOC{-Pi1-Si2-Si3-}(i=3,4)
4.4 确定支路在两平台装配的几何条件
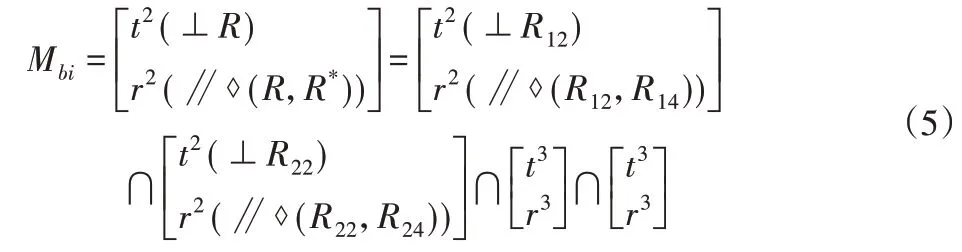
(1)支路1和2的末端构件POC集为:

支路3和4的末端构件POC集为:

(2)建立并联机构方位特征方程
将支路末端的POC集代入并联机构POC方程,得:
(3)为实现平台的二维转动,并考虑到减少消极运动副的原则,支路在两平台装配的几何条件应为:

4.5 检验机构的自由度
已知支路拓扑结构及其装配几何条件,检验自由度。
(1)确定第一个独立回路的独立位移方程数ξL1:

其中,第一二条支路组成的子并联机构DOF与POC集为:

(2)第二个独立方程为:

其中,第一二三条支路组成的子并联机构的DOF与POC集为:

(3)确定第三个独立回路的独立位移方程数与DOF为:

因此机构DOF=4满足设计要求
4.6 判断机构消极运动副
第一,二条支路组成的子并联机构的DOF为:

由消极运动副判断准则,判断R24是否为消极副
(1)将R24副刚化,支路POC集变为
(2)确定第一个回路的独立位移方程数为:

同理求得:ξL2=6,ξL3=6F(1-2)=19-(4+6+6)=3 ;
因此该副不为消极副。
4.7 选取机构驱动副
一般并联机构的所有驱动副都位于同一平台上,现判定并联机构的4个P副可否同时为驱动副。
(1)假设刚化P41P11,P21,P31,P41副,得到一个新机构
其支路拓扑结构分别为:

(2)确定第一条独立回路的独立位移方程数:
由串联机构POC方程得运算规则,第一,二条支路组成的第一个独立回路的位移方程数为:

其中,第一,二条支路组成的子并联机构的DOF为:

其中,第一,二条支路组成的子并联机平台POC集为:

同理得:ξL2=6,ξL3=6
(3)确定新机构的DOF为F*=16-(4+6+6)=0
其中,新机构DOF=0,由驱动副判定准则,并联机构平台上的P11,P21,P31,P41副,可同时为驱动副。
4.8 确定并联机构的拓扑结构
由上述步骤可知,图9并联机构的拓扑结构如下:

图9 2T2R机构的拓扑结构Fig.9 The Topology Structure of 2T2R Mechanism
(1)4条支路的拓扑结构分别为:
支路1和2:SOC{-Pi1⊥Ri2∥Ri3⊥Ri4-}(i=1,2)
支路3和4:SOC{-Pi1-Si2-Si3-}(i=3,4)
(2)两平台的拓扑结构为:R12∥R22,R14/R24
(3)定平台上的P11,P21,P31,P41副为驱动副
机构拓扑结构用于AGV搬运,得到搬运并联机构构型在空间中的配置,如图10所示。动平台为被搬运车辆的底盘,定平台为AGV车体框架,定平台上的四个移动副为驱动副,可以适应不同轴距车辆的搬运。
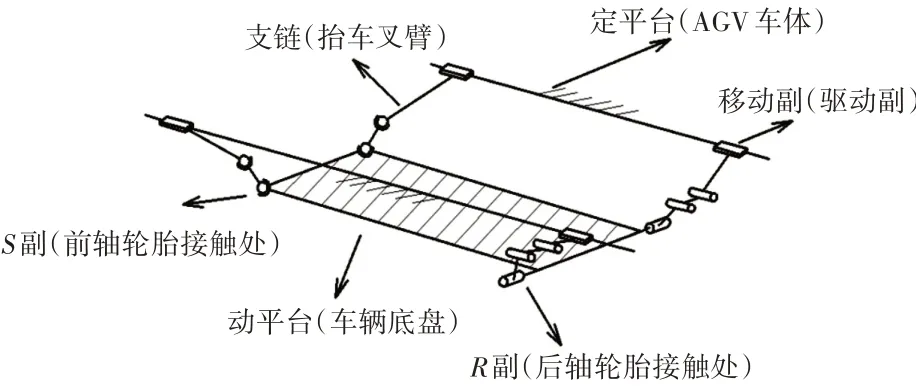
图10 AGV搬运并联机构构型空间配置Fig.10 The Configuration of Transporting Parallel Mechanism
5 结论
这里以POC 集为基础,研究了将并联机构动平台的位姿调节任务与车辆搬运机构的有机结合,进行了以下研究:(1)针对前后轴轮胎构造的差异,基于轮胎与抬车叉臂不同的接触状态、相对运动,将接触点抽象为不同的运动副,得到每个支链末端运动副的类型。(2)基于对整个AGV搬车模型抽象为并联机构动静平台的过程,对被搬运车辆的自由度进行分析,确定为实现车辆水平度调节所需的动平台平移和转动的数量。(3)基于方位特征集的拓扑结构设计理论,结合AGV搬运车辆的实际需求,确定了每条支链末端运动副的类型,缩小了机构综合的求解域。(4)该研究在丰富2T2R机构种类的同时,也为对于AGV车辆搬运过程中水平度的调节提供了新的思路。
