一种制动夹钳智能分解机器人力传感器标定方法研究
2022-11-18冯乐乐
冯乐乐
(国能铁路装备有限责任公司沧州机车车辆维修分公司,河北 沧州 061000)
0 前言
在机器人研究与应用领域,通常运用多维力/力矩传感器检测机器人末端操作器触碰、推动或抓取物件时所承受的力和力矩。机器人获得力感信息后,根据力控制进行复杂、精细的作业,因此多维力/力矩传感器是提高机器人完成作业水平和智能化水平的关键部件[1]。
应用于制动夹钳智能分解的机器人六维力传感器可以采集测试对象在空间所受力与力矩的数据,这种复合型多维度力传感器以三维正交力和三维正交力矩这6组物理量表达测量结果[2],现在广泛应用于机械工业作业中。
目前大部分六维力传感器是通过测量六维力传感器内部的弹性体的形变来得到其六维力和力矩的。姜力团队根据BP神经网络理论提出了新型静态非线性解耦方法[3],其后,燕山大学赵延治又研发出拥有16分支、承载能力更强且具有自标定特性的正交并联六维力传感器[4]。
受元器件加工工艺的限制、应变片制作工艺以及贴片误差等多种因素所影响,这种复合型力传感器在实际工况中的输入、输出特性曲线与理论研究曲线并不一致,因此必须设计标定试验来取得其实测数据,进而判断传感器的精度。
1 六维力传感器自标定关键点分析
传感器的静态标定在测试中的意义是极其重要的,是保证传感器精度的必要工作。应用于制动夹钳智能分解的机器人六维力传感器中的压力应变片受到压力后将输出电荷信号,即将压力信号经传感器转换为电荷信号。多大的压力可以使它产生多少电荷,靠传感器是无法确定的,必须使用专用设备。利用专用设备确定这种转换关系的过程称为标定,计量学称之为定度,即用标准器确定传感器的输入-输出关系。
不同功能的传感器需要不同的标定设备。即使同一种传感器,精度等级要求不同,标定设备也不同,但是所有的力传感器标定的过程都分为2个部分。
第一步是从世界坐标系转为标定坐标系,这一步是三维点到三维点的转换,包括R、t等参数。
第二步是从现有力坐标系转为成像平面坐标系,这一步是三维力到六维力的转换,如图1所示,采用传统标定方法,对多维力传感器进行多方位、多力矩标定。由样机在施加不同方向和大小的标准力条件下的结果数据得到二者之间的数值关系,再在此基础上进行校正,分析样机的性能,这是静态标定工作的本质。

图1 多维力传感器传统标定法
对用于制动夹钳智能分解机器人六维力传感器进行自标定的核心是计算其六维力和力矩输出与贴应变片处应变力的关系。这类传感器的静态线性标定是在假设传感器受力关系为线性系统的基础上,建立作用在传感器坐标系原点上的多维力与相对应传感器各通道的输出之间的关系。这种关系可表达为F=C×U。
因传统Stewart结构[5-6]并联六维力传感器具有整体体积较为庞大、结构设计复杂和分支数据量大的特性,且为达到标定试验的准确度对标定台的要求更高,该文根据以上缺点,设计了一种基于机器人技术的可进行自标定的,结构简单、便于安装的新型正交并联力传感器,先对传感器6个维度分别加载逐级递增的标定载荷,然后采集对应通道的模拟信号数据结果,再利用数值拟合等方法编程求解,以理论输入特性曲线为参照得到最相符的标定矩阵,标定矩阵的准确度越高,代表传感器精度越高。
2 研究思路
用于制动夹钳智能分解机器人六维力传感器能实现对空间给定坐标系3个坐标方向上的力与绕3个坐标轴的力矩的实时测量,其本质是具有特定分布结构的力传感器组对从多个方向、不同大小载荷采集到的多通道电压变化值的数据量进行分析与运算,进而输出被测对象所受的力与力矩。
与Stewart六维力传感器不同,该文根据应用于制动夹钳智能分解机器人六维力传感器的受力特性及应变片的应力片贴片方式,设计了可进行自标定且结构简易、便于安装的新型正交并联六维力传感器。该传感器由上盖板、下盖板、外壳以及弹性体组成,其中弹性体为三梁结构,在弹性体3个应变梁贴装应变片,对应变片进行采值、计算,并进行标定,如图2所示。

图2 六维力传感器
3 标定方法设计方案
该文区别于传统的固定六维力传感,和对六维力传感各个方位施加力及力矩,进而获得应力与应变对应关系的传统标定方法。拟利用机器人自身能够准确变位的性能,将应用于制动夹钳智能分解机器人六维力传感器安装在机械臂末端,并将单一方向、单一大小的一组负载力沿重力方向加载安装在机械臂末端的六维力传感器上,通过机器臂自身的准确变位,实现对该六维力传感器的自身变位,进而对传感器自身施加不同方向的力及力矩,并采集紧密贴合在六维力传感器上的电压应变片的电压变化,将力及力矩变化值与电压应变片的电压变化值进行比对、矩阵转换,获得标定力矩阵,完成对该六维力传感器的自标定。该六维力传感器利用机器人技术进行自标定的详细过程如下。
首先,将该六维力传感器安装在机械臂末端,并在六维力传感器末端固定加载一组载荷,该组载荷大、小固定,与机器人的安装位置相对固定。如图3所示。该附加载荷大、小固定,方向垂直向下。
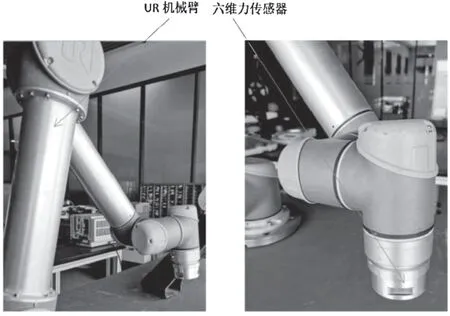
图3 六维力传感器安装位置示意图
其次,利用六轴机械臂能够在空间准确完成空间六自由度变位的机器人运动特性,将加载在机械臂末端的负载进行机械臂自动变位,进而能够得到负载对空间坐标X、Y、Z及围绕坐标轴Rx、Ry、Rz的力矩及转矩数据,如图4所示,分别测量、记载载荷在X、Y、Z三坐标上的Fx、Fy、Fz以及围绕3个坐标上的转矩Mx、My、Mz在六维力传感器上所呈现的力矩及转矩值。
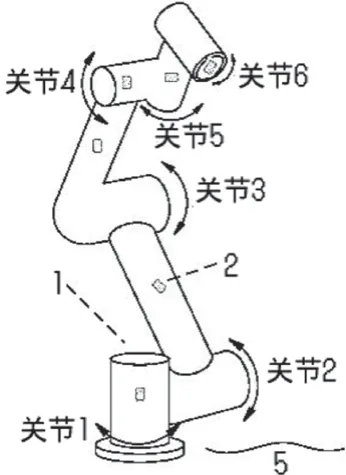
图4 六轴机械臂结构示意图
再次,同时根据贴在传感器特定位置力臂梁上的应变片所产生的应变电压值,形成如下的力、力矩及应变片电压值对应表格,见表1。表1中左侧加载力/力矩值Fx,Fy,Fz以及Mx,My,Mz,表1中的读数为应变片变化对应Fx,Fy,Fz及Mx,My,Mz的输出电压值Ux、Uy、Uz、Uu、Uv、Uw。根据上述操作,可以得到一组基于在相对传感器固定位置,加载1 kg负载,传感器内部应变片由于力的作用而产生了传感器内部发发生应变,所产生的应变片电压应变值,及为应力与电压应变值的一组矩阵。

表1 力、力矩及应变片电压值
最后,根据如公式(1)所示的矩阵还原算法,可有效降低维间耦合误差。
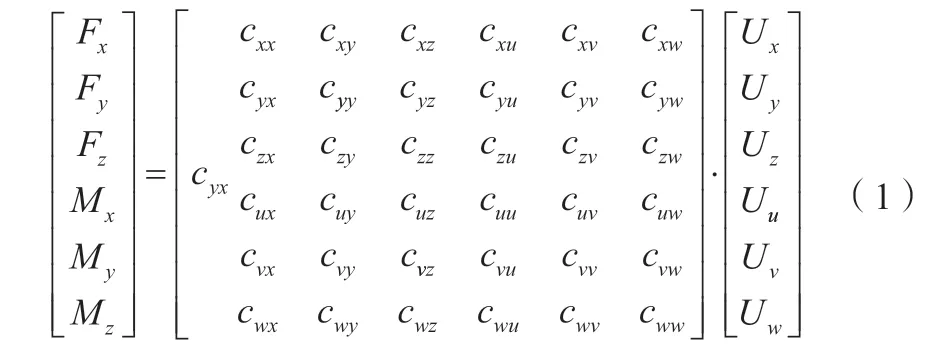
基于最小二乘理论,解出关键标定矩阵C的最小二乘解,如公式(2)所示。

式中:F为标定力向量组成的标定力矩阵;U为传感器的输出矩阵。
利用关键标定矩阵C,完成对加载力、力矩变化值与电压应变片的电压变化值的矩阵转换,进而可以获得应变片的电压值与加载力的对应关系,完成对该六维力传感器的精确标定。
4 试验分析
利用MATLAB软件对试验数据进行分析。将如图5所示的在机器人末端沿Fx方向加载1 kg负载所对应的电压变化值输入传感器的输出矩阵U,根据公式(2)可获得标定力向量组成的标定力矩阵。
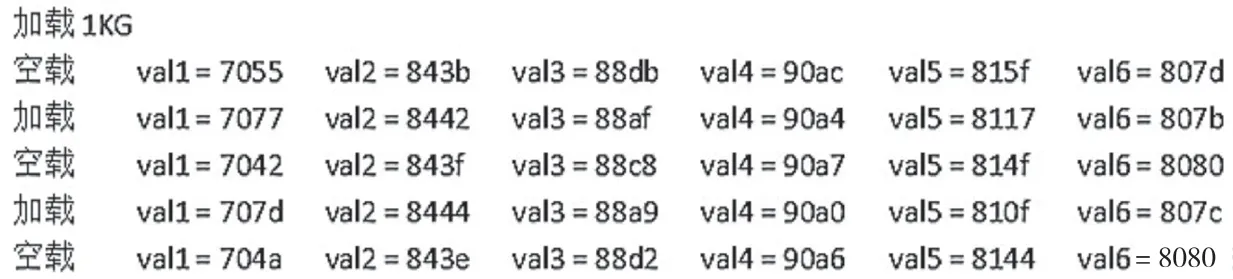
图5 负载对应电压图
表2为MATLAB数据转化表,可以显示多组数据;不同加载力、力矩数据关系,现选取其中一组数据进行数值比对。如图中数据显示:Fx为-1.071,与实际加载1 kg的偏差约为0.07%。从2组数据对比中可以看出,标定矩阵表所示加载额定力矩同实际加载力矩在不同位姿中的输出及输入数据相符,满足机械臂使用要求。因此,利用机器人技术对应用于制动夹钳智能分解机器人六维力传感器进行自标定可较为准确的获得力及力矩。

表2 MATLAB数据转化表
5 结语
该文根据应用于制动夹钳智能分解机器人六维力传感器受力特性及应变片的应力片贴片方式,利用机器人自身能够准确变位的性能,将该六维力传感器安装在机械臂末端,通过机器臂自身的准确变位,实现对该六维力传感器的一次加载,采集传感器内部电压应变片的电压变化,将力及力矩变化值与电压应变片的电压变化值进行比对、矩阵转换,进而获得标定力矩阵。
该文设计了一种可实现自标定且结构简易、便于安装的新型正交并联六维力传感器,利用机器人技术对应用于制动夹钳智能分解机器人六维力传感器进行自标定的方式进行了分析,并确定了其可行性。
