有源电力滤波器的滞环SVPWM电流控制研究
2022-11-18冯怡菲陈忠孝
冯怡菲 陈忠孝
(西安工业大学,陕西 西安 710021)
0 前言
随着各项技术的发展,电力行业的设备逐渐被智能设备替代,越来越多的电力电子器件应用再电力系统的各个方面。在电力系统中有源电力滤波器是用于谐波抑制的装置。在整个谐波抑制过程中,最重要的环节是指令电流跟踪,影响整个设备的谐波抑制效果。为此,该文利用传统滞环控制与 SVPWM 控制的优势,对滞环 SVPWM 控制法进行研究[1]。
1 有源电力滤波器原理及模型
1.1 APF的工作原理
有源电力滤波器APF是目前治理谐波最有效的装置,APF具有动态抑制谐波、快速跟踪各类谐波电流以及补偿无功功率的作用[2-3]。
APF的工作原理如图1所示。APF一般由信号调理检测、指令电流计算、功率开关驱动和APF主电路4个部分组成:1)信号调理检测模块是实时检测三相电网系统的电压电流,并将其采集到的数据经调理电路输出为用于数字信号处理器所能处理的数字信号。2)指令电流计算模块是将采集到的谐波电流信号转换为与其大小相等、方向相反的指令电流信号。3)功率开关驱动模块是根据电流跟踪控制算法跟踪指令电流信号,得到补偿信号,进而驱动开关。4)APF主电路是由功率开关器件组成的,通过开关管产生抑制系统谐波的补偿电流。

图1 并联型APF工作原理
其具体工作原理如下:先利用APF中的信号调理检测模块检测到的谐波电流ih,再由指令电流计算模块得到指令电流,根据谐波电流跟踪控制算法获取产生补偿电流的控制信号,控制电子开关器件,产生补偿电流。APF抑制谐波的原理是检测电力系统中的谐波电流,经过处理得到指令电流,通过控制算法跟踪指令电流,产生PWM脉冲信号,控制器件产生补偿电流,达到谐波抑制的效果[4]。
1.2 APF的数学模型
三相三线制有源电力滤波器的电路结构的本质上是一个三相三线PWM电压源型变换器[5]。建立数学模型前,将逆变器三相的开关函数定义为Sa、Sb、Sc,以Sa为例,如公式(1)所示。

式中:Sa为三相逆变器A相的开关函数。
APF的数学模型如公式(2)所示[6]。

式中:L为补偿电路的电感;C为变流器侧储能元件;ia、ib、ic为APF的补偿电流;usa、usb、usc为三相电网中的三相相电压;Sa、Sb、Sc为三相逆变器的开关函数;udc为系统中APF直流侧电容的电压。
2 滞环控制与SVPMW控制
滞环SVPWM控制是传统的滞环电流跟踪控制算法与SVPWM电压空间矢量控制算法的结合[6],下面先分别介绍这两种控制方法,分析其优、缺点,再阐述滞环SVPWM控制法的原理。
2.1 滞环电流跟踪控制
滞环控制的原理框图如图2所示,将指令电流i*c与实际电流ic相减,得到误差电流Δic,经过滞环比较器,与设定的环宽值进行比较,生成相应的PWM信号,使APF输出电流跟踪指令电流[7]。该方法的优点是控制原理简单,但是控制精度是由环宽值决定的。如果环宽值较大,跟踪指令电流产生的补偿电流误差大,APF抑制谐波的效果会变差;如果环宽值较小,就会提高跟踪指令电流的响应速度,同时提高谐波抑制效果,但是高的响应速度会提高电子器件的频率,长期使用会缩短其使用寿命,因此选择适当的环宽值很重要。目前,根据经验选取环宽值。
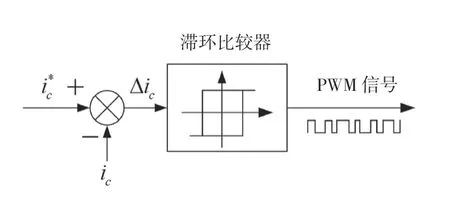
图2 滞环比较控制方法原理框图
2.2 电压空间矢量控制SVPWM
SVPMW控制法如图3所示,选取参考电压矢量u*ref,利用该矢量相邻的2个非零电压矢量和零电压矢量合成电压矢量,不断逼近参考电压矢量[8]。

图3 参考电压矢量分区及合成矢量图
该方法优点是电子器件的频率低,控制精度高,但是算法实现复杂,成本会相应提高。该文基于以上对滞环比较控制和SVPWM控制法的原理及优、缺点,阐述滞环SVPWM控制法的原理。
2.3 滞环SVPMW控制的原理
滞环SVPWM控制原理如公式(3)所示。

式中:L为补偿电路的电感;Δi为误差电流矢量;为参考电压矢量;uk为逆变器交流侧空间电压矢量。
因此,滞环SVPWM控制的原理可描述如下:根据有源滤波器的输入量,对参考电压矢量和误差电流矢量Δi进行选取;根据公式(3)即可找到最优的空间电压矢量uk,此时误差电流矢量的变化率最小,APF跟踪指令电流的精度最高,抑制谐波的效果最好;再推导出开关逻辑,进而控制主电路开关管的通断,输出补偿电流。综上所述,可将滞环SVPWM控制分为4个环节,即参考电压矢量的选择、误差电流矢量Δi的选择、最优空间电压矢量uk的选择和开关管控制逻辑。下面将针对这4个环节详细说明。
3 滞环SVPWM控制的4个环节
该节将分别对滞环SVPWM控制的4个环节详细分析[9],并针对4个环节中的参考电压矢量选取的判断进行改进。
3.1 参考电压矢量的选择
参考电压矢量区域如图4所示。对参考电压矢量所在区域的判断,可根据有源电力滤波器交流测输出的参考线电压的正负,确定参考电压所在的区域。例如,如果0,参考电压矢量就落在Ⅳ区。
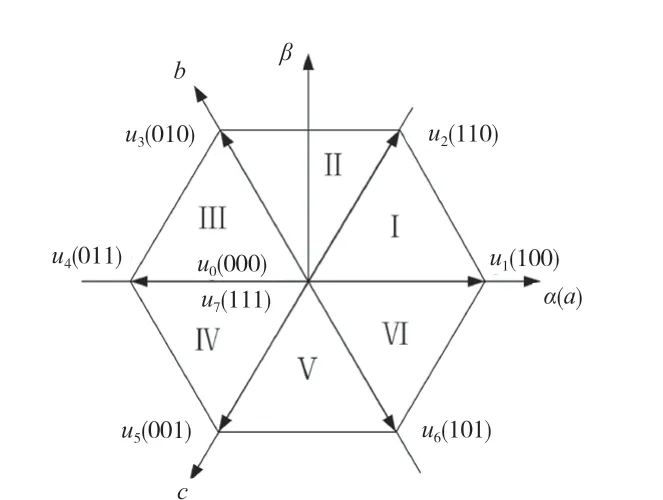
图4 参考电压区域
因此,采用相间误差电流矢量Δiab、Δibc、Δica的正负极性来确定参考电压矢量。例如,当Δiab>0、Δibc>0、Δica<0时,可得 到此时应属于区域Ⅰ。同理,可得出其他状态下参考电压矢量uref*所处区域,见表1。

表1 参考电压矢量uref*的区域判断表
3.2 误差电流矢量的选择
误差电流矢量所在区域如图5所示。

图5 误差电流区域
误差电流矢量所在区域的判断为先得到abc轴上的投影,然后再对得到的3个电流符号进行判断,进而确定误差电流所在的区域。例如,Δia>0,Δib>0,Δic<0,可判断出Δi在区域②。同理,得到的误差电流矢量所在区域表,见表2。

表2 判断误差矢量Δi所在区域表
3.3 最优空间电压矢量的选择
当参考电压和误差电流确定后,根据公式(3)可知,对指令电流的精确跟踪程度与误差电流矢量的模值|Δi|成反比。由此可知,误差电流的变化率dΔi/dt要与误差电流矢量Δi方向相反,需要在满足此条件的多个空间电压矢量中选择最优的一个空间电压矢量。下面为选择最优电压矢量的基本原则[10]如下:1)当误差电流模值小于等于环宽值时,保持原来的输出电压。2)当误差电流模值大于环宽值时,此时应选择使误差电流的变化率要与误差电流矢量方向相反的输出电压矢量,且得到的模值须为最小。如图6所示,如果参考电压矢量位于Ⅰ区,当误差电流矢量Δi位于②区时,根据以上选取的基本原则,以ui(i=0,1...7)的终点为起点,指向作矢量,就可以得到公式(3)。由图6可知,只有u2满足最优空间矢量的选取原则。最优空间电压矢量选择的基本原则见表3。

表3 最优空间电压矢量uk的选取

图6 空间电压矢量选择示意图
3.4 开关管控制逻辑
根据上述内容得到控制各开关管的开关逻辑。当Sa=1时,u1、u2、u6为最优的空间电压矢量uk值;当Sb=1时,u2、u3、u4为最优uk值;当Sc=1时,u4、u5、u6为最优uk值。同理,得到各开关管的开关逻辑如公式(4)所示。

式中:ui*(i=Ⅰ,Ⅱ,Ⅲ,Ⅳ,Ⅴ,Ⅵ)为参考空间电压矢量u* ref所在区域i;Δij(j=1,2,3,4,5,6)为误差电流矢量Δi所在区域j,j与①~⑥相对应。
4 仿真试验分析
根据上述分析,在Simulink中建立基于滞环SVPWM控制法的APF模型。以非线性负载作为单谐波源进行仿真,A相谐波源的电流波形如图7(a)所示,谐波畸变率为24.46%;经传统滞环SVPWM控制法进行谐波治理后的电流波形如图7(b)所示,谐波畸变率降至6.75%;经改进后的滞环SVPWM控制法治理后的谐波电流如图7(c)所示,谐波畸变率为3.49%。因此,改进后的滞环SVPWM控制法降低了谐波电流的畸变率,谐波补偿效果明显,提高了动态性能。

图7 仿真结果对比图
5 结语
该文对应用于电力系统中抑制谐波的装置,有源电力滤波器的控制方法进行研究。介绍了有源滤波器的工作原理与数学模型,分析了滞环控制与电压空间矢量控制的原理及优缺点,阐述了滞环SVPWM控制的原理以及该算法的4个环节,主要针对其中的参考电压矢量的选择进行改进,最后,在Simulink环境下的仿真对比结果表明,改进后的算法对APF治理谐波具有较好的稳态跟踪能力及响应速度。
