基于ARM单片机的城市轨道交通车载ATP测速定位实验装置设计
2022-11-17陶汉卿
陶汉卿
(1.柳州铁道职业技术学院 自动控制学院,广西 柳州 545616;2.大连交通大学,辽宁 大连 116028)
0 引言
随着我国城镇化进程的加快,城市交通问题的日益突出,城市轨道交通因具有运量大、占地少、速度快、准点舒适,安全节能的特点,其建设蓬勃发展,进入了黄金发展时期[1],城市轨道交通通信信号技术专业也相继在各个高校开设。
城市轨道交通列车运行控制系统(ATC系统)设备是城市轨道交通通信信号技术专业工作岗位维护的重要设备,实现ATC系统功能的基础是列车的速度和位置,因此,测速定位系统是城市轨道交通ATC系统的重要组成部分,测速定位技术则成为ATC系统的关键技术[2]。在城市轨道交通通信信号技术专业的教学中,列车测速定位技术是重点内容,教学的目的主要是要求学生掌握测速和定位设备的拆装与维护,因此,建设城市轨道交通通信信号技术实训室时需要有测速定位设备。
由于专业发展和技术更新较快,人才需求量大,城市轨道交通测速定位设备昂贵,维护成本高,实训室建设跟不上专业发展,实训设备一般采用直接采购的方式,由于经费和场地的限制,大多高职院校的专业测速定位实训设备比较缺乏。目前,有少数的厂家在研发城市轨道交通通信信号技术专业实训设备,但是这些设备仅限于虚拟仿真,达不到训练的效果。因此,为了加快实训室的建设,降低成本,更好地根据城市轨道交通车载ATP测速定位装置的实训课程要求开发实训项目,提高实践教学效率,需要开发城市轨道交通车载ATP测速定位实验装置。
本文根据城市轨道交通通信信号技术专业相关课程和教学内容的要求,结合企业真实的生产标准、教学情景和实训室场地的实际情况,研究开发小型化、实用性强、价格低廉和功能齐全的城市轨道交通测速定位实验装置,应用于加快城市轨道交通通信信号技术实训室建设,以期满足城市轨道交通通信信号技术专业相关课程内容的实践教学和企业职工培训,提高学生和企业职工的实践综合动手能力,努力培养高素质技术技能型人才。
1 车载ATP测速定位实验装置的组成
目前,城市轨道交通车载ATP测速定位传感器主要采用光电脉冲测速传感器和多普勒雷达[3],测速定位实验装置模拟的是这两种传感器,主要由光电传感器电路、模拟雷达测速电路、CPU处理电路、TFT液晶电路、GPRS模块电路等组成。采用光耦和光码盘模拟光电传感器,组成光电传感器电路,利用超声波测速电路模拟多普勒雷达,实现对速度的测量,经过32位带FLASH的单片机STM32F103V8T6进行处理,采用卡尔曼滤波方法对两种传感器采集的数据进行融合,得到准确的列车运行速度,然后将速度进行积分运算,得到距离信息,设定列车运行的初始位置,从而计算出列车的位置,达到测速定位的目的,将测速定位结果在TFT液晶显示屏显示,同时将测速结果通过GPRS模块发送到上位机监控端,实现对列车速度和位置的实时检测,且监控端可以通过GPRS模块发送列车定位修正的相关参数。其具体组成框图如下页图1所示。
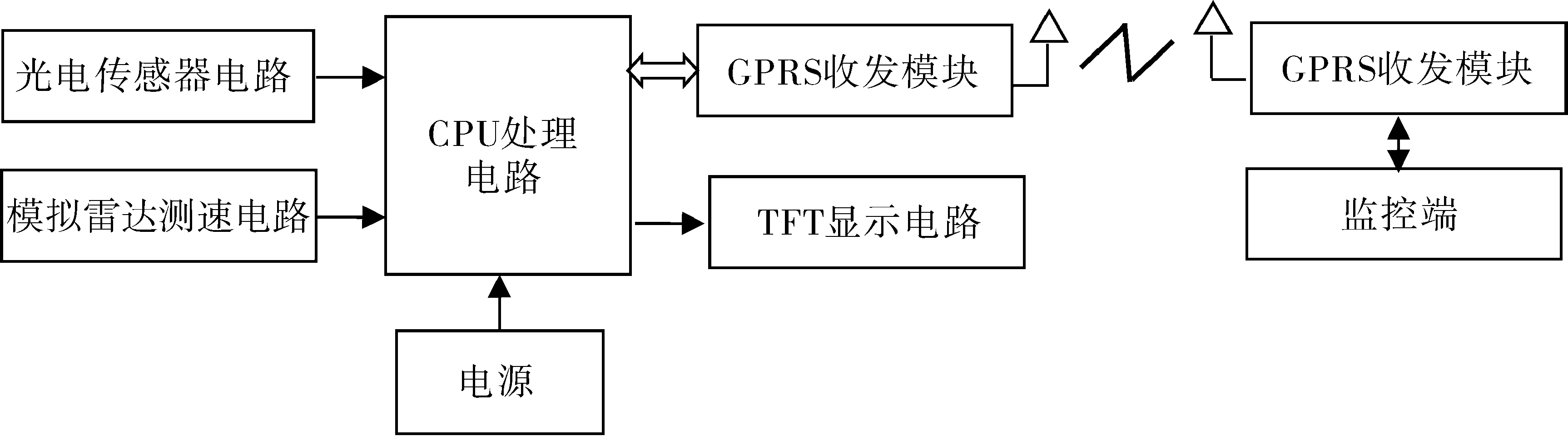
图1 测速定位装置结构图
2 装置硬件设计
硬件设计主要包括光电传感器电路、模拟雷达测速电路、CPU处理电路、TFT液晶电路、GPRS等模块电路的设计。CPU处理电路采用32位的CORTEX M3的微控制器STM32F103V8T6单片机,用于对光电速度传感器和雷达测速电路采集到的数据进行处理、进行卡尔曼滤波,得出准确的速度值,然后计算出距离,对列车进行定位,并显示在TFT液晶显示屏,同时与监控端计算机进行通信。STM32F103V8T6芯片是32位ARM核心带FLASH的单片机,具有11个内置的16位定时器,片内有单周期乘法和硬件除法,支持72 MHz的时钟,大大提高了对列车速度和定位的检测精度。STM32F103V8T6内置有用于存放程序和数据的64 K或128 K字节的闪存存储器,提高了卡尔曼滤波代码运行效率和对列车速度位置检测的时效性。STM 32F103V8T6支持定时器、ADC、SPI、I2C和USART等外设,80个快速IO接口,可以连接GPRS收发模块和TFT液晶显示模块,简化了GPRS无线数传模块的设计[4],还可以进行在线调试和下载,提高了测速定位实验装置的可操作性和维护便利性。
2.1 光电传感器电路
本文设计的测速定位实验装置光电传感器采用的是增量式光电编码器,主要由光码盘、发光二极管、光敏传感器、转轴、波形变换电路、电源及连接线等组成。在光码盘上等间距地开通100个长方形孔,光码盘转轴连接到列车车轴,车轴带动光码盘同步速度转动,发光二极管安装在光码盘的一侧,光敏三极管安装在另一侧,当光码盘的旋转到有方形孔位置时,光敏三极管能接收到发光二极管的光,当光码盘旋转到无方形孔位置时,光敏三极管接收不到发光二极管的光。光敏传感器产生正弦波,经过波形变换电路输出脉冲,通过检测脉冲的频率可以计算出列车的转速。增量式光电编码器还可以输出两路相位差为90°的脉冲信号,用以判定列车运行的方向[5]。光电传感器测速定位具有结构简单、易于实现等优点。
增量式光电编码器测速接口电路如图2所示。图中,增量式光电编码器A相输出接到STM32F103V8T6的TIM4_CH1口,B相输出接到STM32F103V8T6的TIM4_CH2口,TIM4作为计数器使用,计算增量式光电编码器A、B两相的脉冲,TIM3作为定时器,每间隔10 ms的周期产生中断,CPU读取TIM4_CH1、TIM4_CH2两个口的脉冲数,TIM4停止计数。CPU对脉冲数采用式(1)进行计算,得出A、B两相采集到的速度值。
V=πD×3.6×f/N(km/h)
(1)
式中:V——列车运行速度(km/h);
f——增量式光电编码器输出脉冲的频率;
|N——增量式光电编码器旋转一圈输出的脉冲数;
|D——城市轨道交通列车的车轮直径,本设计采用840 mm。
当两相速度值|vA-vB|≤1 km/h,认为速度值准确,取速度较大值,与雷达测速值进行融合,否则认为测速不准确,取前一个时刻的速度值与当前时刻的雷达测速值进行融合。
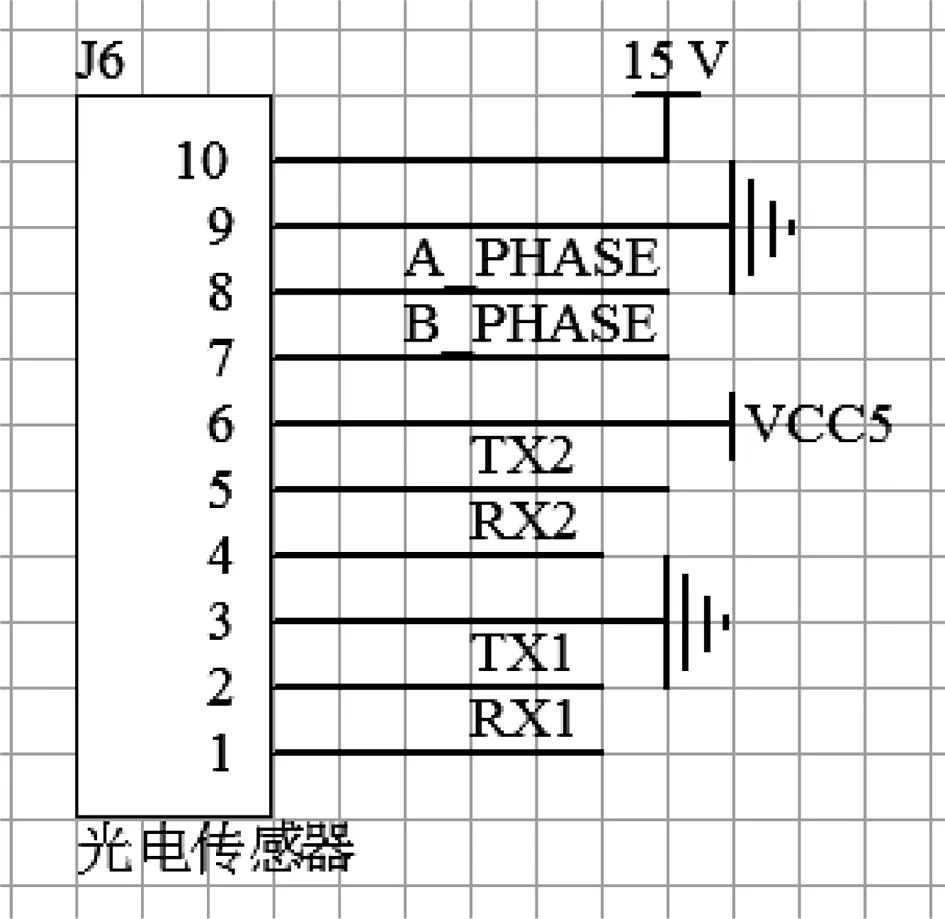
图2 增量式光电编码器测速接口电路图
2.2 模拟雷达测速电路
光电传感器容易受列车空转和打滑的影响,本设计增加了超声波检测模拟城市轨道交通的雷达测速,用以克服光电传感器测速的缺点。该超声波电路由发射电路和接收电路组成。
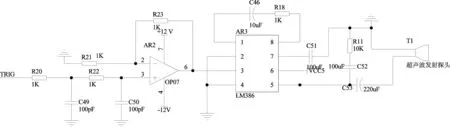
图3 超声波发射电路图
超声波发射电路如图3所示。电路的TRIG接STM32F103V8T6单片机的TIM_CH1口,由定时器TIM2产生频率为40 kHz的方波发送,经过两级放大,其中前级采用超低失调电压双路运算放大器,后级采用LM386高增益放大,放大后的方波信号驱动超声波发射探头将超声波发射。

图4 超声波接收电路图
超声波接收电路如图4所示。电路采用超声波专用接收芯片CX20106A,配以外围器件OP07双路运算放大器和LM555CM电路组成。接收到的超声波信号经过OP07组成的运算放大电路进行放大后,由LM555CM组成多谐振荡电路进行整形,然后接入CX20106A的1脚,由CX20106A的7脚输出,送至STM32F103V8T6单片机的TIM_CH2口。CX20106A芯片适用于城市轨道交通超声波测速定位实验装置,具有很好的灵敏度和较强的抗干扰能力。
2.3 显示模块
本文设计的测速定位实验装置采用320×240分辨率的TFT液晶显示器(LCD)以图片、文字、曲线等形式显示学校和系统信息,以及采集到的列车速度和定位信息,该LCD具有体积小、显示清晰、功耗低、方便携带等特点。该模块供电电压为3.3 V,可以直接和STM32F103V8T6单片机相连,STM32F103V8T6单片机的PE0~PPE15等16根数据线与TFT液晶显示器的16根数据线相连,STM32F103V8T6单片机的PC2与CS控制线相连,PC3与控制线RS相连,PC4与控制线WR相连,PC5与控制线RD相连,PC6与RST复位信号控制线相连。接口电路如图5所示。
3 系统软件设计
系统的下位机程序主要由光电传感器测速程序、模拟雷达测速程序、卡尔曼滤波的速度数据融合程序和显示程序等组成。上位机监控端采用PC机模拟城市轨道交通车载人机界面,通过GPRS与下位机通信,在上位机进行车轮直径和列车初始位置的设置,然后传输至STM32F103V8T6单片机进行列车速度和定位的检测。下位机软件程序设计流程如图6所示。
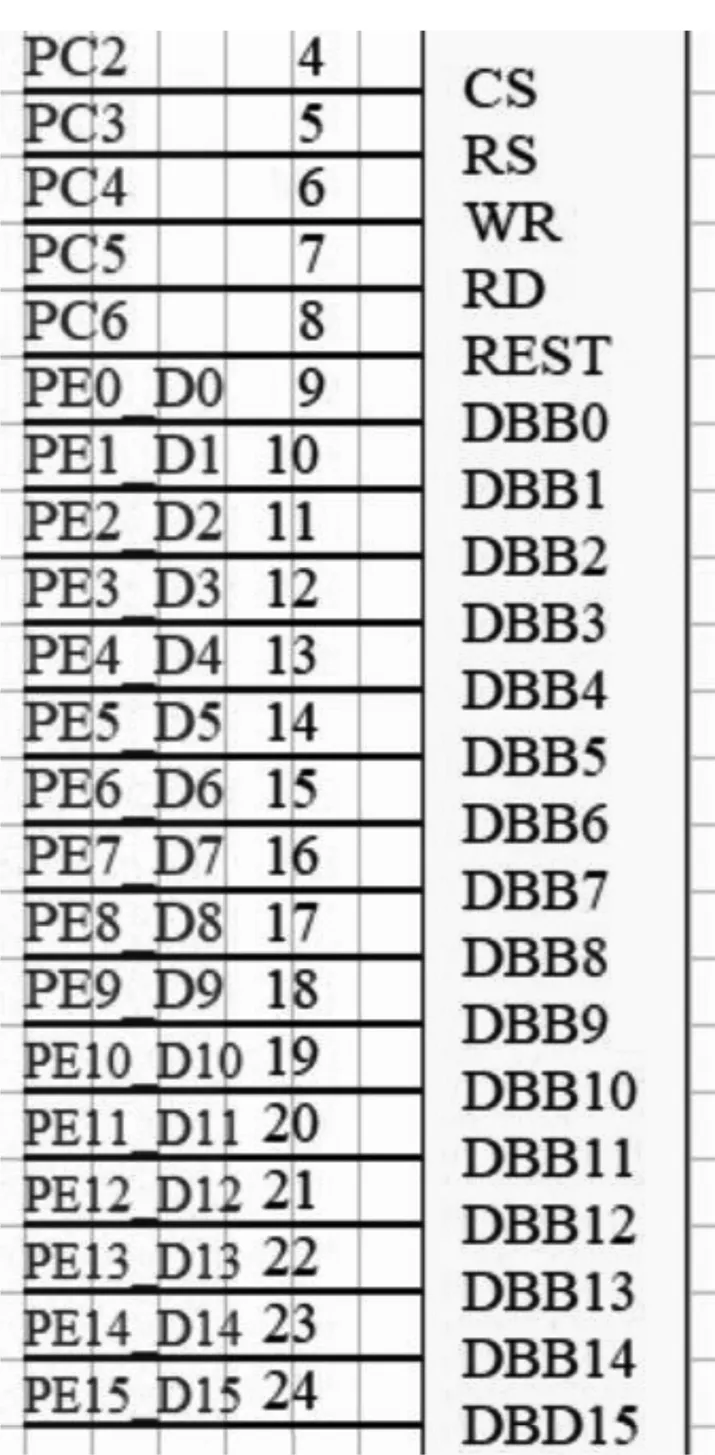
图5 TFT接口电路图
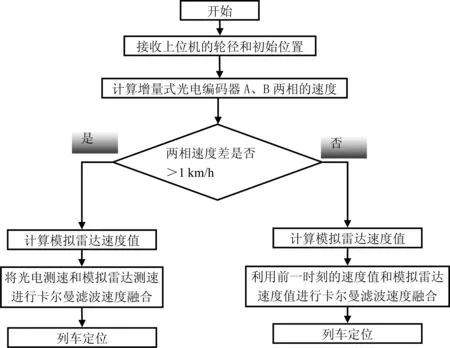
图6 下位机软件程序设计流程图
3.1 光电传感器测速程序
将增量式光电编码器A、B两相的脉冲分别计算得出速度值,判断两相的速度差是否在±1 km/h范围内,如果是,取速度较大值作为光电传感器测速值,反之,则取前一时刻的速度值与当前时刻的模拟雷达测速值进行速度融合作为列车速度值。
3.2 模拟雷达测速程序
模拟雷达测速模块周期性发出的超声波脉冲信号,采用定时器TIM2对系统内部72 MHz高速时钟以计数的方式计算超声波脉冲信号发射和接收的时间差,根据超声波的速度可以计算出列车运行速度。
3.3 卡尔曼滤波速度融合
因为测速定位实验装置安装在模型车上,而模型车是按照实际列车的车轮轮径按一定比例缩小的,所以要采用实际列车的直径进行速度计算,经过融合后的速度值乘以时间值计算出距离值,从而结合初始位置进行定位。
由于地铁列车在运行过程中车轮会产生磨损,根据式(1),光电传感器测速会直接影响速度的测量精度,所以在速度定位检测的计算中需要进行补偿或修正[6]。
本设计采用了光电传感器测速和模拟雷达测速两种测速结合的方式,安装两个光电传感器和一个模拟雷达测速传感,从而获取多个速度值,然后对这些数值进行卡尔曼滤波,进行轮径补偿和空转滑行的修正后计算出准确的速度和距离值,提高测速定位的精度。
4 系统测试
本文设计的测速定位实验装置使用的列车采用1∶87的模型车,采用直流24 V蓄电池供电。模型车在沙盘上运行,检测的速度均为真实列车轮径、模拟雷达测速传感器模型车速度换算后的速度。按照城市轨道交通车载ATP测速定位传感器的标准,对测速定位实验装置进行了测试,测试结果如图7所示。

图7 测速定位实验装置测试结果示例图
由图7可知,设定距离为列车开始运行至停车点的距离,转速A为光电测速传感器检测到的速度,转速B是模拟雷达测速传感器检测到的速度,“+”符号表示正方向运行,时速为数据融合处理后所得到的速度,行程为列车走行的距离,程标距离是列车当前位置至停车点的距离。
5 结语
本文以STM32F103V8T6为CPU,设计了城市轨道交通列车测速定位实验装置,实现了模拟车载ATP光电传感器测速和雷达测速。将采集的速度值进行卡尔曼滤波,对轮径磨损进行补偿,对速度进行修正,提高测速定位的精度。测速定位实验装置按照最优准则进行最优融合,提高了速度采集的精度。测速定位实验装置体积小、成本低和功能齐全,满足高职院校“适用、够用”的原则,丰富了实践教学内容,加快了院校城市轨道交通通信信号技术实训室的建设,提高了专业教学效率,具有较高的实用价值和经济效益。