“BIM+Unity 3D”技术在地铁区间盾构施工中的应用
2022-11-17许梁
许 梁
(中铁武汉大桥工程咨询监理有限公司,湖北 武汉 430040)
0 引言
地铁隧道施工最常用的方法为盾构法,盾构隧道衬砌结构采用预制管片拼装而成。随着BIM技术的发展,BIM模型作为信息载体与容器,其内嵌项目构件的相关信息属性,需要有更为直观的视觉化平台来有效地展示这些信息[1-3]。Unity 3D开发环境的特色使其具有更强的具象性及互动功能,可以有效地加强BIM模型的可视化和具象沉浸式体验效果[4-5]。“BIM+Unity 3D”技术在地铁盾构施工中的应用,从传统的电脑三维模型中读取构件属性转变到身临其境的场景中,利用BIM建立的模型结合Unity 3D实现动态漫游查看各构件属性、安全教育、事故模拟、施工复杂节点查看、空间方案技术交底等沉浸式体验。本文就“BIM+Unity 3D”技术在地铁区间盾构施工中的应用进行介绍。
1 设计技术路线
本研究提出一种新的技术实现思路:通过Revit建模工具实现盾构管片精细化三维建模,采用Civil 3D构建区间的三维地质模型,基于Unity 3D实现联动和漫游,同时将危险源的沉降监测信息实现在线发布和数据分析。系统整体结构设计如图1所示。

图1 系统整体结构设计
2 BIM模型构建
2.1 管片BIM模型构建
以1.2m幅宽的标准环为例简单介绍管片BIM模型的制作流程。
(1)制作顶面轮廓族:首先打开BIM建模软件-revit,选择“公制轮廓”,然后保存轮廓[4],见图2。

图2 顶面轮廓族
(2)制作模型:打开“公制常规模型”功能,并在此基础上做好参考线;随意绘制路径,保证路径垂直于管片上下两个面,并且长度为1.2m。然后点击“编辑轮廓”,编辑轮廓完成后,点击“√”,初步生成标准块模型,将制作好的标准块分别按参照线作为轴线来进行镜像得到三维图像,如图3所示。

图3 管片BIM模型
2.2 区间Civil 3D地质建模
区间地层地质建模采用Civil 3D和3Dmax相结合的方式进行,通过研究地质剖面图确定钻孔数据,考虑到钻孔数据的片面性,为更真实体现实际地层分布,引入空间插值算法建立可靠地层界限混和构模技术,形成了构建精细三维地质模型的技术思路,见图4。

图4 地质建模和编程技术思路
(1)地质建模俯视效果:透过俯视效果图可以看出不同的地质结构以及地形结构,如图5所示。

图5 俯视效果
(2)地质建模侧面效果:通过BIM软件的渲染与润色功能,设定不同地层的填充形式,使其更加形象化,如图6所示。

图6 侧面效果
3 基于盾构机实时数据驱动施工管理平台的搭建
为保证盾构隧道施工正常推进,保障周边建筑物及环境的安全,通过移动端、传感器等设备采集的多源信息整合分析,在Unity 3D开发环境中结合BIM模型实现信息的可视化表达。基于此提出风险源实时感知方法,建立了一套全过程、多角度、多维度的盾构隧道BIM安全风险智能监控系统,重点研究BIM技术在盾构隧道施工管理及安全管理中的应用,实现了隧道施工数据实时掌控,安全风险事先辨别与预防,施工全过程监控与预警。
(1)BIM+Unity 3D区间盾构实时数据接入总体效果展示。Unity 3D平台与盾构机实时数据对接(时间、环数、里程、总推力、推进速度、土仓压力等开放性数据),如图7所示。隧道埋深根据公式定义计算,实时显示。图7的上下两部分为塔谈站右线对应的实时盾构机的掘进情况,实时展示掘进环数和掘进里程,以及不同的进度对应的地质结构情况。

图7 Unity 3D平台与盾构机实时数据对接总体效果
(2)转向和纵向变坡提示。根据图纸中的具体位置将转向点和纵向变坡标注在三维地质结构图中,如图8所示。
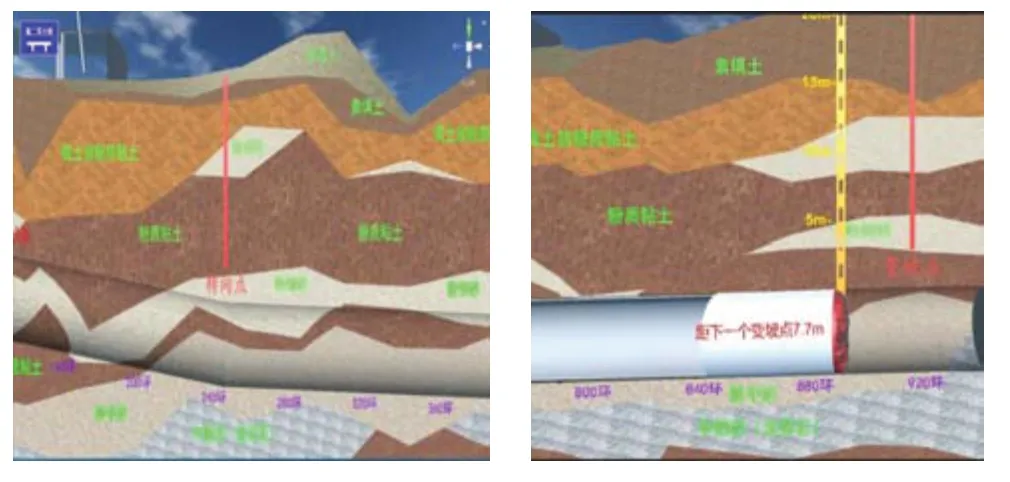
图8 转向及变坡提示
(3)盾构机数据实时展示。通过网络数据传输的方式实现对盾构机数据的采集和解析,采集盾构机实时数据包括:时间、环数、里程、总推力、推进速度、压力泵压力、主推进油缸A行程等,系统对采集到的实时数据进行实时展示,并且根据盾构机刀盘转速实时调整右侧模型中刀盘的模拟转速,如图9所示。

图9 盾构数据展示
(4)危险源预警。根据危险源所在的里程,进行预警展示(预警位置:距离盾构机30m),并且在盾构机下实时标注危险源的距离,如图10所示。
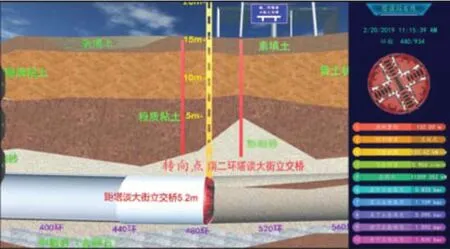
图10 危险源预警
4 结束语
对地铁盾构区间施工基于BIM技术的应用研究,主要实现三维模型的构建以及盾构机数据的接入与展示。
(1)三维模型的构建。利用Revit、3Dmax、Civil 3D软件实现对区间结构、三维地质结构以及路面附属建筑的建模,将模型导入到Unity3D开发环境实现对三维模型的操作和运用。
(2)盾构机数据的接入与展示。将盾构机数据通过网络接口的形式接入到软件中,实现盾构机数据的实时接收,处理和分析,并在三维模型中进行展示,同时驱动三维盾构机模型按照实际运行情况进行推进,同时根据地质、危险源、转向、变坡等情况实现超前预警。
