城市污水处理过程动态多目标智能优化控制探讨
2022-11-16魏国荣尉迟佶佼榆林市污水处理厂陕西榆林719000
文/魏国荣、尉迟佶佼 榆林市污水处理厂 陕西榆林 719000
引言:
在现代城市的污水处理中,通常需要经过初沉、曝气以及二次沉淀等一系列的处理过程,这一过程包括了多个流程,且各处理流程之间存在紧密联系,彼此之间会产生相互的影响。同时,污水处理过程中往往还综合应用了化学反应、生物反应以及基本的物理反应等多个反应过程,进一步加大了污水处理过程的复杂程度,且操作过程具有较强的动态性特征。因此,要实现对城市污水处理过程的优化控制,必须积极应用智能化控制技术,并合理确定各项相关动态性能指标。在此基础上通过动态性能指标模型构建以及相关算法的综合应用达到优化多目标性能指标以及智能控制城市污水处理过程的目的。论文在城市污水处理过程动态多目标智能优化控制中采用的是DMOIC策略,下面将对该策略进行详细的分析研究。
1、现代城市污水处理中的动态过程特点
目前,在城市污水处理中所采用的处理方法有多种类型,不同的处理方法在具体的处理过程上存在一定的差异。论文将主要以较为常见的活性污泥处理方法为例,对污水过程的动态特点进行分析研究。在应用污泥技术对城市污水进行处理时,主要是以活性污泥所具有的吸附性能、氧化性能以及生物凝聚性能为基础,通过生态反应以及二次沉淀过程,将污水中所含的有机质成分分解[1]。之后再分离水和污泥,分离出的污泥部分将向曝气池回流,而其余部分将从活性污泥处理系统排出。综上所述可知,采用活性污泥技术方式对城市污水进行处理时,其过程较为复杂,且具有较强的动态性特征。其运行特点主要体现为处理过程处于动态变化中,且具体的反应过程会受到微生物活性以及入水流量等因素的影响。同时,在活性污泥处理过程中涉及了泵送能耗、曝气能耗以及出水水质等多个动态性能指标,且各项性能指标状态在反应过程中存在动态变化,根据对反应过程的总结发现,性能指标的优化调整周期大约为2h。而不同的性能指标间不仅相互冲突,而且还会相互干扰。因此在对城市污水的这一处理过程中进行智能优化控制时,还应合理确定被动便利的设定值,以增强城市污水处理能力,确保处理后的出水水质能够达到国家以及地方规定的排放标准。
2、城市污水处理过程动态多目标智能优化控制策略分析
随着我国绿色环保发展理念的提出,城市污水处理问题受到了越来越广泛的关注。在现代化城市的建设过程中,对污水处理的能力和质量也提出了越来越高的要求。为适应新时期城市污水处理的实际需要,提升污水处理规模出水质量,降低污水处理能耗,需要加强对污水处理这一动态过程中的智能优化控制。由于在污水处理过程中存在多个相互冲突的目标,且过程具有较强的动态特性,因此应合理选择智能优化的多目标控制策略。结合城市污水处理实践以及其过程控制特点,论文采用的是DMIOC控制策略。所谓DMIOC控制策略也就是Dynamic multiojective intelliegent optiomal control的缩写[2]。由于该策略在对动态性能指标进行建模时是以自适应核函数为基础,因此可以较为准确的表述泵送能耗、曝气能耗以及出水水质等各项关键性指标参数,具有一定的应用优势。同时,在该控制策略中,还采用了以飞行参数的自适应调整机制为基础的、多目标动态粒子群算法进行优化,能够对飞行参数进行自适应调整,有利于保证粒子收敛性以及其多样性之间的平衡,对于优化硝态氮以及溶解氧的设定值有重要作用。在该策略中主要采用了PID多回路策略来优化可控制硝态氮以及溶解氧设定值。
3、城市污水处理过程智能优化控制动态多目标系统研究
通过DMIOC策略对城市污水处理的动态过程进行智能优化控制时,应通过自适应核函数的应用,来进行出水水质以及各项能耗模型的构建,以准确掌握污水处理过程的基本动态特征。此外,还采用了DMOPSO算法,以取得出水水质控制与能耗控制之间平衡,实现对被控变量设定值的合理优化。
3.1 城市污水处理过程智能优化控制动态多目标系统架构的构建
在城市污水处理过程动态多目标智能优化控制中,首先,应采用DMIOC策略进行多目标控制架构的构建。在该智能化多目标优化控制架构中,出水水质、泵送能耗以及曝气能耗等各项动态性能指标模型是架构的重要基础,基于该模型能够准确掌握多目标智能优化控制系统的具体动态特征[3]。同时,在该架构中采用DMOPSO算法对各设定值进行动态优化,该算法是根据飞行参数的自适应调整机制来对出水水质模型、泵送能耗模型以及曝气能耗模型进行优化,从而实现对硝态氮以及溶解氧等被控变量设定值的优化。该架构中还采用了PID多回路恐慌策略来控制硝态氮以及溶解氧的设定值。该架构中活性污泥处理过程中的基准仿真模型实验平台的构建应符合相关技术标准。
3.2 构建城市污水处理动态过程性能指标模型
在对城市污水处理过程进行多目标智能优化控制时,其目标主要是降低运行能耗以及确保处理后的出水水质能够达到排放标准,以减少对环境污染。因此,为提升城市污水处理的操作性能,必须首先对污水处理过程中的泵送能耗、曝气能耗以及出水水质等各项动态性能指标进行准确的描述。根据对活性污泥处理过程的总结发现,各项性能指标通常在2h左右完成一个动态调整周期,所以在各优化周期内均应对动态性能指标进行实时获取。根据对城市污水的活性污泥处理过程的分析可以掌握固体悬浮物浓度、入水流量、氨氮浓度等与泵送曝气能耗以及出水水质这三项关键性动态性能指标密切相关的过程变量,之后即可以通过自适应核函数的应用来对动态性能指标模型与其相对应的过程变量之间的动态关系加以描述。以自适应函数为基础所构建的曝气能耗模型、泵送能耗模型以及出水水质模型能够以自适应方式对期望输出值以及实际输出值进行对比分析,并根据误差情况调整像样的性能指标参数,为城市污水处理的智能优化动态多目标控制奠定良好的基础。
3.3 优化动态性能指标设定值
在采用DMIOC策略对城市污水处理的动态过程进行智能优化控制时,其优化目标函数应采用在指定时刻条件下构建的曝气能耗模型、泵送能耗模型以及出水水质模型,以实现对这三项动态性能指标设定值的同步优化。在优化时,应采用DMOPSO算法,应以飞行参数的自适应调整机制为基础进行迭代优化[4]。而在这一过程中,当更新了粒子速度以及位置时,则应结合搜索空间维度、惯性权重以及迭代次数等因素,来对当前速度以及以前速度的影响加以控制。同时,还应充分考虑加速度长输、均应分布随机值以及历史位置最优值等影响要素,以利用种群寻优方式实现对全局最优位置的确定。
在应用DMOPSO算法时,其布局开发能力以及全局探索能力均会受到飞行参数的影响。当寻优过程中惯性权重以及其中一个学习参数较大,而另一学习参数相对较小时,该粒子群具有较强的全局搜索能力;反之,粒子群则具有较强的局部开发能力。通过以种群间距信息为基础的调整参数方法的应用能够实现粒子收敛与多样性之间的平衡。其中,种群间距信息可以通过指定迭代时刻条件下的粒子间的曼哈顿最小距离、粒子个数等参数来描述。
粒子飞行是一个复杂程度较高的非线性过程,因此在描述粒子飞行过程时结合所有粒子飞行参数来建立非线性函数。同时,应在指定迭代时刻条件下,根据维度、惯性权重以及全局和局部的学习因子等来表述其迭代更新。
粒子种群分布特征可以通过种群间距信息来呈现。如果存在较大的PS值时,说明粒子群呈不均匀分布特征,其全局搜索能力需要进一步加强。在此条件下为促使粒子群多样性的提高,应适当加大飞行参数以及一个学习参数,且应同时减小另一个学习参数。反之,当PS值相对较小时则表明粒子群具有较好的多样性,而其局部开发能力的加强则需要通过对飞行参数以及学习参数的相应调整来实现。在DMOPSO算法中,以种群间距信息为基础的自适应参数调整机制在确定了优化目标函数后即可随其非支配解进行计算分析,并在档案库中存储相关数据。选择全局最优解时,DMOPSO算法可以按照出水排放标准基础上的最低能耗原则进行最优解的选择,从而在保证曝气能耗、泵送能耗与出水水质动态性能指标之间的平衡性的前提下获得优化后的被控变量设定值,以实现对城市污水处理过程动态多目标智能优化控制。
3.4 智能控制动态性能设定值
在对城市污水处理过程进行动态多目标智能优化控制时,为控制优化设定值,可以采用PID多回路控制策略。PID多回路控制策略主要是对微分环节、比例环节以及积分环节的变量操作误差进行调整,以达到调整被控变量的目的,且能够在15min内完成对被控变量的调整。在对PID多回路控制策略进行表述时,应结合内回流量变化值、氧传递系数变化、微积分系数矩阵以及比例系数矩阵等参数对操作变量的输出值进行计算分析,其中误差值则应根据硝态氮以及溶解氧的优化设定值与的实际输出值之间的差值来确定。
3.5 城市污水处理过程动态多目标智能优化控制策略应用效果评价
为确以定DMIOC策略以及DMOPSO算法为基础的城市污水处理过程动态多目标智能优化控制效果能够达到预期目标,应利用基准仿真平台以及基准测试函数进行验证分析。在评价DMOPSO算法时,采取的是与其他优化算法的控制效果进行对比分析的方式,对算法的SP多样性指标以及GD收敛性指标等指标参数加以计算,从而得出较为准确地验证分析结果。
在计算SP多样性指标以及GD收敛性指标时,应综合真实Pareto前沿参数、通过进化算法所获取的非支配解以及非支配解集内的单独解等要素,以及知识库内的非支配解数量、Pareto前沿解数量、欧式距离最小值、欧式距离平均值、DMOPSO种群初始化后的种群大小和迭代次数等因素进行全面的考虑,以确保计算分析结果的准确性。同时,在将DMOPSO算法与其他算法进行对比分析时,应根据DMOPSO算法中各项参数的设定来确定其他算法参数,以保证验证分析的公平性以及客观性。而在验证DMIOC策略的有效性时,则应以绝对误差积分为基础对控制性能进行评价。绝对误差积分主要通过对样本总数、硝态氮以及溶解氧的优化设定值与实际输出值之间的误差值等来计算。
3.5.1 DMOPSO算法逼近效果的验证分析
为准确验证评价DMIOC策略以及DMOPSO算法对城市活性污泥污水处理过程动态多目标智能优化控制效果,应将优化目标函数确定为曝气能耗、泵送能耗以及出水水质这三项关键性动态性能指标模型,并在优化后的第6d对不同优化算法的逼近效果进行计算分析。通过对比可以发现,在油画界分布方面,采用DMOPSO算法能够获得比NSGA、pccsAMOPSP以及clusterMOPSO等算法更为均匀地分布效果。
3.5.2 DMOPSO算法优化性能的验证分析
在验证评价中分别利用四个测试函数对不同优化算法的性能进行了计算。根据计算结果可以发现,采用DMOPSO算法在四个测试函数计算中分别获得了最小SP值以及最小GD值,因此说明在城市污水的活性污泥处理过程中,采用DMOPSO算法进行动态多目标智能优化控制可以更好地实现粒子群在收敛性以及多样性之间的平衡,并达到获得最佳优化阶段目的。
3.5.3 DMOPSO算法计算时间的验证分析
对不同的算法还需要比较其优化计算时间。在验证分析中同样采用了4个测试函数分别进行计算。根据对计算时间的同计算,采用DMOPSO算法的计算用时虽然并不是最少的,不过与最少用时算法之间的计算时间并无明显差异。因此通过对相关因素的综合分析,可以说明采用DMOPSO算法具有快速项Pareto前沿收敛的效果。
3.5.4 DMIOC控制策略优化性能的验证分析
为准确判断DMIOC控制策略优化性能,对不同优化控制策略中的泵送能耗平均值分别进行了计算,以便加以对比分析。通过比较可知,采用DMIOC控制策略使得泵送能耗平均值在不同优化控制策略中最小。同时,DMIOC控制策略的应用还能够使曝气能耗明显降低,能够有效降低曝气成本。在出水水质方面,根据对不同优化控制策略的控制效果进行对比发现,出水水质的最优值仍是采用DMIOC控制策略所获得。
根据对不同优化控制策略的对比分析可知,采用DMIOC控制策略后曝气能耗平均值、泵送能耗平均值以及曝气与泵送操作的能耗之和均比其他优化策略要低。而且DMIOC控制策略的出水水质也优于其他优化控制策略。综合各项验证分析结果可以发现,在采用活性污泥方式的城市污水处理过程中,DMIOC控制策略是较为有效的动态多目标智能优化控制方式,其能够在改善污水处理后的出水水质的基础上,实现降低操作能耗的目标,因此DMIOC控制策略具有良好的控制效果。3.5.5 DMIOC控制策略被控变量控制效果验证分析对被控变量控制效果的对比分析也是验证评价DMIOC控制策略在城市污水处理过程动态多目标智能优化控制中有效性的重要标准之一。在验证时可以采用绘制控制效果图的方式对硝态氮以及溶解氧这两个活性污泥处理中的主要被控变量的控制效果展开分析研究(控制效果图可参见图1、图2所示)。通过应用DMOPSO算法可以实现对溶解氧设定值的优化,而采用PID多回路控制策略则可以对溶解氧控制变量的实际输出值进行计算。根据对二者的对照发现,应用DMIOC控制策略可以实现对溶解氧优化设定值的有效跟踪。同时,在对硝态氮这一被控变量的控制效果进行分析时,同样可以通过DMIOC控制策略以及PID多回路控制策略分别获得其优化设定值以及实际输出值。通过对二者的综合分析可以发现,采用DMIOC控制策略可以有效控制溶解氧以及硝态氮这两个主要被控变量的优化设定值。此外,在验证分析中还将DMIOC控制策略的控制性能与其他控制策略进行了对比分析,通过对比发现,DMIOC控制策略的控制性能最佳,能够确保出水中的有机物含量符合排放标准。
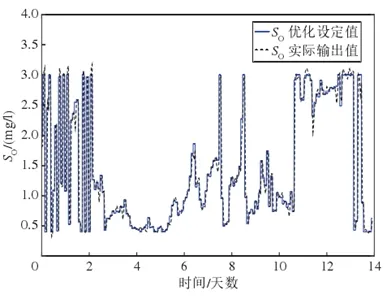
图1 溶解氧控制效果图

图2 硝态氮控制效果图
结语:
为实现对城市污水处理动态过程的多目标智能优化控制,应准确掌握其过程动态特征,并在此基础上合理选择相应的控制策略,通过构建动态性能指标模型,应用自适应核函数以及相关算法对各项动态指标性能的设定值进行优化,以达到优化城市污水处理过程控制效果、提高多目标控制智能化水平的目的。同时在对污水处理过程进行动态多目标智能优化控制时,还应结合城市污水处理所采用的具体处理方式、反应类型等合理确定反应时间,以确保所获取的污水处理过程动态特征客观准确,从而进一步提高现代城市的污水处理能力,为改善我国城市环境,保护水资源提供重要的支持。
