一种交战条件下车载光学测量设备分层任务规划方法
2022-11-15郭健柴华王磊
郭健 柴华 王磊
(航天工程大学 航天指挥学院,北京101416)
1 引言
随着航天器产业的快速发展,空间目标变得越来越多,对空间目标管理与维护的需求也越来越迫切[1,2]。空间目标探测能力是实现空间目标管理与维护的重要保证,而车载光学测量设备是提高战时空间目标探测能力的有效手段之一。车载光学测量设备具有可移动、小型化、可批量部署、生存能力强等突出优点[3],拥有较好的应用前景。但同时由于在信息化战争条件下,空间目标携带的侦察载荷能够快速发现和定位威胁源,为远程武器提供目标指示,从而对车载光学测量设备实施精确打击。因此,研究一种最少暴露时间下的车载光学测量设备任务规划方法就显得尤为重要。
2 问题描述
某类车载光学测量设备(以下简称设备)的使用具有如下特点:设备随载车部署于隐蔽的车库中,需要执行探测任务时设备随载车沿公路运输,由车库前往预设测站;到达预设测站后,在空间目标过顶的一个较短时间区间内设备对其进行探测,该时间区间称为设备对空间目标的探测窗口;对每一个空间目标,设备须对其探测一定次数才能保证完成探测任务,且设备在探测过程中还要满足相应的约束。一次高效探测任务的完成,往往要涉及多套设备、多个车库、多个测站和多个目标。因此,须预先制定快速测量/机动隐蔽状态转换时的探测方案,明确参加本次任务的多套设备分别在什么时刻到什么地点去探测哪一个空间目标。
在制定设备探测方案时,探测任务规划的问题可描述为:现有X个隐蔽车库{A1,A2,…,Aβ,…,AX),车库Aβ停放设备的数量为aβ(β =1,2,…,X),须在t1~t2时间区间内对NT个空间目标进行探测且每个目标要探测NS次,可供使用的测站有NL个,求最少暴露时间下的探测方案。
上述问题的内涵近似于军事运筹学领域经典的武器目标分配(Weapon Target Assignment,WTA)问题。国内外对WTA 问题的研究主要划分为模型研究和算法研究两类。模型研究探讨如何建立更为合理、贴近实际的模型[4];而算法研究则是针对给定模型探索如何更快速有效地解决WTA 问题[5]。在WTA 模型研究方面,20 世纪90 年代以来,美军国防分析研究所一直致力于WTA 模型研究,文献[6]将基本WTA 问题扩展到多武器平台对多目标的打击;文献[7]考虑了武器的费用以及不同武器组合对目标的打击情况,提出改进的武器优化与资源需求模型;文献[8]建立了以干扰效能指数最大化为目标的干扰分配数学模型,用来解决不同作战对手、力量配置、对抗手段情况下的分配决策问题;文献[9]基于自适应决策中心的协同决策体系结构,提出了一种动态武器目标分配的协同决策模型;文献[10]为解决舰艇编队所面临的多种类、多批次目标饱和攻击火力分配问题,建立了编队防空多平台多防空武器的火力分配模型;文献[11]在分析装甲分队火力打击战法的运用方式及其对分配结果影响的基础上,建立了面向装甲分队战法运用的两阶段WTA 模型。在对WTA 问题的求解上,文献[12]对比分析了传统匈牙利算法与智能优化算法,创建了可适用于所有类型目标分配问题的可适应匈牙利算法;文献[13]为了有效解决多导弹对多机动目标的拦截对抗实战中的目标分配问题,提出一种基于精英策略的多种群自适应遗传算法;文献[14]研究了在复杂的战场作战环境中多个动态威胁下如何快速规划出最优航路,提出一种在优化算法框架下稀疏A*算法与遗传算法相结合的动态航路规划算法;文献[15]根据粒子聚集度来判断早熟停滞,提出了一种改进的量子粒子群优化算法;文献[16]使用多目标模糊优选理论建立最佳武器-目标分配模型,采用了蚁群算法将分配模型转化为蚁群网络进行求解。
与经典WTA 问题相比,本文研究的探测任务规划问题不仅考虑时间窗口,地点要素还包括车库和测站两个维度,构成了一个涉及时间、设备、地点、目标四个独立要素相互映射的问题,其内核更为复杂、规模发散更快,已有的WTA 模型无法使用,需要结合问题实际提出更加适用的求解策略。为解决这一问题,提出了一种分层求解方法,将这一涉及五个维度的复杂问题转化为测量方案筛选与调度方案计算两个相对维度较少的问题来处理,为快速准确地获得最优解提供了一条有效途径。
3 分层任务规划方法
分层任务规划的总思路是:先求解所有独立要素的解空间,再根据约束和评价指标求得最优解。要解决的问题是:快速测量/机动隐蔽状态转换时的探测任务规划问题。针对上述求解思路和要解决的问题,同时考虑到时间窗口交叉等因素,可将求解策略分成三步,即探测窗口全集计算、测量方案筛选和调度方案计算。探测窗口全集计算将获得给定探测时间区间内所有测站对所有空间目标的所有探测窗口。测量方案筛选将从探测窗口全集中挑选满足约束条件且评价指标优异的子集作为最优测量方案。调度方案计算将对照最优测量方案编排制定设备自车库至测站的最优调度方案。分层任务规划方法的操作流程如图1 所示。

图1 分层任务规划方法的操作流程
3.1 探测窗口全集计算
探测窗口的计算涉及设备工作机理和空间目标的运动特性、光学特性等约束。利用已有的探测窗口算法,遍历NL个测站和NT个目标,计算得到t1至t2时间区间内探测窗口全集,可表示如下:

式(1)中,Wijk表示探测窗口全集中的任意一个探测窗口,下标i表示窗口对应的测站,下标j表示窗口对应的空间目标,表示设备在第i个测站对第j个空间目标共有个探测窗口,下标k表示其中的第k个探测窗口。
3.2 测量方案筛选
首先从探测窗口全集中进行测量方案初选,获得初选测量方案集合;然后剔除不满足约束条件的测量方案,获得可行测量方案集合;最后对可行测量方案进行对比分析,获得最优测量方案。
3.2.1 初选测量方案
基于获得的探测窗口全集,利用排列组合原理进行测量方案初选,方法如下。
(1)依据空间目标划分探测窗口全集。根据需要探测的NT个空间目标,将探测窗口全集S划分为NT个子集,每一个子集表示为:

式(2)中,Sj表示探测窗口全集S中对应于第j个空间目标的所有探测窗口的集合,其中包含的探测窗口的个数为:

对于NT个空间目标,设备共需探测NI=NS×NT次。
(2)得到初选测量方案。针对第j个目标,从中任选NS个元素(由排列组合理论可知,共有种可能的选法)。遍历NT个目标,选出NI=NS×NT个探测窗口,从而得到一个初选的测量方案。对于NT个目标,初选测量方案的总数为:
3.2.2 可行测量方案
针对NInit个初选测量方案,需要分别判断每一个初选测量方案是否满足约束,满足约束即为可行方案。可将任意一个初选测量方案表示为Sm,获得可行方案的方法如下。
(1)判断最小探测间隔约束。按照初选测量方案Sm中探测窗口对应的不同测站,将其划分为若干个子集,并将子集中的探测窗口按照发射时刻先后排序,整理后对应于第i个测站的测量方案子集Smi为:

式(5)中,Wip表示Smi中的第p个探测窗口,表示Smi中的探测窗口个数。
针对子集Smi,将i由1 遍历至NL,再将p由1 遍历至,判断下式是否成立:

式(6)中,Ti(p+1)为探测窗口Wi(p+1)对应的探测时刻,ΔTmin为设备在同一测站的两次探测之间必须满足的最小时间间隔。
在循环遍历过程中,一旦式(6)不成立,则初选测量方案Sm为不可行方案,需要将其剔除;若式(6)成立,则认为初选测量方案Sm满足最小探测间隔约束。
(2)判断测站数目约束。针对初选测量方案Sm,将i由1 遍历至NL,考察子集Smi中元素个数是否为0,元素个数不为0 的子集数目即为Sm涉及的测站数目NR。
判断下式是否成立:

在循环遍历过程中,若式(7)不成立,则Sm为不可行方案,需要将其剔除;若式(7)成立,则认为初选测量方案Sm满足测站数目约束。
(3)判断初选测量方案是否可行。若初选测量方案Sm同时满足最小探测间隔约束与测站数目约束,则其为可行方案;否则,其为不可行方案。
将NInit个初选测量方案中所有不可行方案剔除,即可获得可行测量方案集合。
3.2.3 最优测量方案
针对选出的可行测量方案,通过设定评价指标来对比测量方案的优劣。可将任意一个可行测量方案表示为Sn,获得最优测量方案的方法如下。
(1)计算探测任务时长。按照可行测量方案Sn中探测窗口对应的不同测站,将其划分为若干个子集,并将子集中的探测窗口按照探测时刻先后排序,整理后对应于第i个测站的子集Sni为:

式(8)中,Wiq表示Sni中的第q个探测窗口,表示Sni中的探测窗口个数。
可行测量方案Sn对应的探测任务时长ΔT可由下式计算:

式(9)中,Tfirst为可行测量方案Sn的开始探测时刻,Tlast为可行测量方案Sn的结束探测时刻;Ti1为Sni对应的最早探测时刻,TiNZi为Sni对应的最晚探测时刻。
(2)以探测任务时长作为评价指标寻找最优测量方案。本文研究最少暴露时间下的测量方案,因此可以选取探测任务时长ΔT作为评价指标,将ΔT最短的可行测量方案作为最优测量方案Sbest。
3.3 调度方案计算
调度方案计算将对照最优测量方案进行设备调度计算,明确车库与测站的对应关系,从而编排制定设备自车库至测站的最优调度方案,进行调度方案计算的方法如下。
将最优测量方案Sbest按照其中的探测窗口对应的不同测站划分为若干个子集,并将子集中的探测窗口按照探测时刻先后排序,整理后的Sbest可表示为:

针对Nbest个测站Bγ(γ =1,2,…,Nbest),为每一个测站配备1 套设备,则最优测量方案共需要配备Nbest套设备。假设从Aβ到Bγ机动一套设备的时间为Cη,设备调度的目的是从X个待机车库中选择Nbest套设备并运输至Nbest个测站,使得总运输时间最短。该问题是运筹学中经典的运输问题,可使用表上作业法求解获得最优调度方案。
4 算例验证
首先给定初始条件:探测时间区间见表1。假设有3 个可用测站,其基本信息见表2。需要对3 个空间目标实施探测,其在t1时刻的经典轨道根数见表3。

表1 探测时间区间
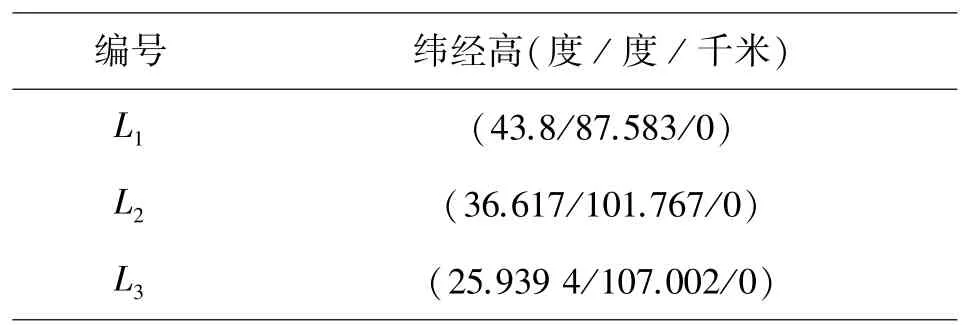
表2 测站位置

表3 空间目标在t1 时刻的经典轨道根数
由表1、表2、表3 给出的初始条件,可以使用STK 软件计算获得探测窗口全集,该全集中包含的探测窗口见表4。

表4 探测窗口全集
由表4 可知,在给定的初始条件下,共有45 个探测窗口。根据需要探测的3 个空间目标,将探测窗口全集划分为3 个子集,则对应于第1 个空间目标的子集S1中探测窗口的个数NW1 为16 个,对应于第2 个空间目标的子集S2中探测窗口的个数NW2为15 个,对应于第3 个空间目标的子集S3中探测窗口的个数为14 个。假设设备需要对每一个空间目标探测2 次。针对第1 个目标,从S1中任选2 个元素,共有120 种可能的选法;针对第2 个目标,从S2中任选2个元素,共有种可能的选法;针对第3 个目标,从S3中任选2 个元素,共有种可能的选法;每一次遍历3 个目标选出的6 个探测窗口构成一个初选测量方案。初选测量方案的总数为120×105×91=1 146 600 个。
假设同一测站的两次探测之间必须满足的最小时间间隔ΔTmin为6 小时,允许动用的测站的最大数目为3 个。利用式(5)~(7)给出的算法,剔除不满足约束的初选测量方案,可获得可行测量方案509 661 个。
针对509 661 个可行测量方案,利用式(8)(9)给出的算法,可获得最优测量方案,见表5。

表5 最优测量方案
该最优测量方案对应的探测任务时长ΔT为15.34 小时,需要配备的设备数目Nbest为3 套。
假设有2 个车库,每个车库停放的设备数量见表6。将设备从不同车库机动到不同测站的运输时间见表7。

表6 设备调度问题产销平衡表

表7 设备调度问题单位运价表
针对表6、表7 给定的已知条件,运用表上作业法进行求解,得到设备最优调度方案见表8,该方案对应的总运输时长为180。

表8 设备最优调度方案
至此,由表5 给出的最优测量方案和表8 给出的最优调度方案,共同构成了最优探测方案。
为了进一步验证本文提出的分层求解方法的有效性,采用了Monte Carlo 抽样方法与本文提出的分层求解方法进行对比。Monte Carlo 抽样方法的求解策略是从计算好的探测窗口全集中,随机抽取容量为10 000 的初始探测方案集合,剔除无效方案后,选取找到最好的一个方案作为最优探测方案。由于Monte Carlo 抽样方法存在较大的不确定性,这里运行了5 次并对结果进行统计分析。算例结果见表9。

表9 最优探测方案
从结果中不难看出,本文所提出的分层求解方法的求解质量要优于Monte Carlo 抽样方法。
5 结束语
实现战时空间目标管理与维护迫切需要提升空间目标探测能力。本文为解决车载光学测量设备的探测任务规划问题,提出了一种可操作的分层求解方法。首先计算探测窗口全集得到所有独立要素的全部解空间,然后将涉及窗口、设备、车库、测站、目标五者分配的探测任务规划问题分成两层来处理。第一层测量方案筛选考虑窗口、设备、测站、目标四个维度下的最优解,第二层调度方案计算关注设备在车库和测站两个状态中的最优解,两层分别得到的最优测量方案与调度方案共同构成了最优探测方案。本文提出的方法扩展性较强,可根据实际中的同类问题做出相应的改进,从而用于解决其他问题。