基于复数主从光学相干层析成像相位信息的离散界面快速定位方法*
2022-11-14钱黄河王迪韩涛丁志华
钱黄河 王迪 韩涛 丁志华
(浙江大学光电科学与工程学院,现代光学仪器国家重点实验室,杭州 310027)
鉴于谱域光学相干层析成像(spectral-domain optical coherence tomography,SD-OCT)系统通常存在非线性采样与色散失配等问题,需要额外的数据处理步骤.此外,所需要的成像区域往往是整个成像区域的一小部分,对于整个成像区域的计算带来了算力资源浪费,而且在离散界面的定位方面,有限的轴向分辨率下亚像素偏差的存在限制了界面的测量精度.针对以上问题,本文提出了一种基于复数主从(complex master slave,CMS)OCT 相位信息的离散界面快速定位方法.联合谱域与深度域的相位信息,精确求解CMS-OCT 的重建模板,并利用CMS-OCT 的相位信息,实现高精度的光程差检测与离散界面定位.最后,通过精密光学量规和光学透镜离散界面实验验证了所提出方法能够在快速定位的同时,保持较高的分辨率和稳定性.本文所提出的方法有效地解决了SD-OCT 系统的非线性采样与色散失配问题,实现了局域范围内的高精度界面快速定位,有望促进SD-OCT 在光学透镜离散界面测量方面的应用.
1 引言
光学透镜在加工和装配过程中涉及的参数很多,对于精密的光学透镜,微小的参数变化可能使透镜的性能下降甚至失效,因此对透镜离散界面进行精确测量具有重要意义.应用最广泛的调制传递函数测量可以直接反映透镜成像性能的退化,然而它不能识别导致退化的结构变化[1,2].一些表面轮廓测量技术,如针尖式形貌检测仪[3]、原子力式显微轮廓仪[4,5]、基于干涉测量的轮廓仪[6-8]可以对单一界面进行轮廓的精确测量,但无法无损地对多个界面进行测量.其他测量技术可以测量透镜表面之间的中心距离[9]以及元件偏心[10],但不能提供其整个表面的形貌信息.此外,X 射线显微计算机断层扫描是一种有效的无损测量方法,其空间分辨率约为几微米,且需要大量的重建时间[11,12].
光学相干层析成像(optical coherence tomography,OCT)[13-15]是一种基于低相干干涉的非侵入、无损伤的三维断层成像技术,具有无损无辐射、高分辨率、高灵敏度等一系列优点.谱域OCT[16-18]是目前应用最广泛的OCT 成像技术,相较于时域OCT,谱域OCT 在分辨率、信噪比、灵敏度和成像速度等方面具有显著优势[19-21].鉴于谱域OCT技术的非侵入、非接触、快速成像与低成本等优势,在光学透镜离散界面的测量方面具有重要应用.在谱域OCT 中,通过对干涉光谱信号进行傅里叶变换可以得到样品的深度域信息.一方面,在探测干涉光谱的过程中,由于光栅型光谱仪的分光原理[22],线阵探测器等像素间隔位置采集到的光谱信号在波数域上并非线性分布,而快速傅里叶变换(fast Fourier transform,FFT)算法要求在波数域上均匀采样,所以在变换之前需要对光谱信号进行重采样处理,来获得均匀的干涉光谱信号[23].另一方面,除了非线性采样带来的影响,参考臂与样品臂之间所用元件的差异,会导致双干涉臂之间的色散不匹配,进而导致轴向分辨率下降.为此,提出了一系列基于软、硬件的解决方案.Hu 和Rollins[24]在光谱仪中引入棱镜构成波数均匀光谱仪,实现对波数线性光谱的采集.Perret 和Heuberger[25]利用法布里-珀罗干涉滤光片生成等间距的定标谱线,通过多项式拟合获得波数标定结果,进而获得波数线性的光谱.Wojtkovski 等[26]提出使用匹配长度的玻璃来进行色散补偿.Rosa 等[27]提出使用基于光栅的相位控制延迟线,通过调整光栅的离焦量改变参考光路的色散系数,从而补偿色散失配.Marks 等[28]通过基于黄金分割法的迭代方法来获取补偿系数进行色散补偿.这类方法需要额外的硬件设施或较大的算力.与上述方法不同,Rivet 和Bradu 等[29-31]提出的复数主从(complex master slave,CMS)算法则无需考虑色散失配与非等间隔光谱采样问题.而且,针对光学离散界面的快速定位需求,CMS 算法拥有快速处理的显著优势.不过,该算法对重建模板的构建精度具有很高的要求.
本文提出了一种基于CMS-OCT 相位信息的离散界面快速定位方法,该方法联合谱域和深度域相位信息,校正了构建CMS 模板时的亚像素偏差,并充分利用CMS-OCT 相位信息实现了亚采样精度的深度域位置快速定位.通过比较所提出的方法与传统成像方法进行离散界面快速定位的效果,验证所提出方法的优势.
2 理论方法
2.1 传统CMS 算法原理
对于单一界面位置z0,CMS-OCT 的深度域信号可以表示为

其中,ki为非均匀波数分布,I(ki,z0)为单一界面位置z0下的复数干涉信号,g(ki)为均匀的波数分布,φ(ki,z0)为对应的光谱域相位分布,记录非均匀波数分布ki和深度域位置z0处的复数相位模板为

这种提取和代换使运算规避了要求波数均匀分布的FFT,回归了原始的矩阵乘法运算,只需要知道相对相位的分布情况φ(ki,z0),即可求得复数相位模板M*,进而通过矩阵运算,得到z0处的深度域信号强度.模板中包含的z0意味着我们可以有选择地构建感兴趣的成像区域的复数相位模板,实现有针对性的局域图像重建.
CMS 算法分为主阶段和从阶段,主阶段的目标是构建相位模板M*,主阶段对于模板中φ的求取,一般使用光程差分别为z1=nΔz+δ1和z2=mΔz+δ2的单一界面干涉光谱进行求解,其中 Δz为深度域采样间隔,δ1和δ2为两个峰值采样点处的亚像素偏差,且m>n,以深度域采样值nΔz和mΔz生成离散采样点pΔz处对应的谱域相位为

其中,Nz为感兴趣区域点的个数,反映模板的大小;Nk为光谱采样点数.
从阶段的目标是求解感兴趣区域内的深度域信号.通过从阶段探测的干涉光谱与复数相位模板的矩阵相乘,可以得到感兴趣区域的轴向反射系数分布:
基于离散傅里叶变换(discrete Fourier transform,DFT)的CMS 算法与FFT 算法的时间复杂度分别为O(n2),O(nlogn),且

CMS 算法虽然在时间复杂度上大于FFT 算法,但是局域小范围的实际运算时间不涉及无关点的运算,不需要计算所有深度区域,因此运算时间更短;其次,数据采集完成后,重采样算法还要进行光谱重采样与去色散等操作,进一步增加了程序的运行时间,在时间上更加落后.
2.2 改进的CMS 模板构建方法
为校正主阶段构建模板时的亚像素偏差,从用于构建模板的单一界面深度域信号中提取峰值点位置处的深度域包裹相位,记为ψw(z0-δ),δ为峰值采样点处相对于实际位置z0的亚像素偏差,z0-δ为离散的峰值采样点位置,相较于理论深度域相位ψ(z0-δ)存在N次的相位包裹,对于这种相位包裹,可以联合谱域相位φ(kc)进行求解,其中kc为中心波数.构造深度域估计相位表达式为

对于(7)式中谱域相位φ(kc)的求取,可以使用最小二乘法拟合其谱域相对相位分布,拟合得到的曲线斜率为光程差的近似值,进而与 2kc相乘得到:

求得深度域估计相位后,用于对深度域相对相位的解包裹,可以得到深度域绝对相位:
在得到深度域的绝对相位之后,可以计算其峰值点位置处的亚像素偏差δ:

求得峰值点处的亚像素偏差后,CMS 算法可以得到校正亚像素偏差的相位:

对比(3)式,可以看出结合相位检测技术可以获得更为精确的比例系数,从而得到更精确的复数相位模板,进而得到具有更高精度的定位效果.
2.3 利用CMS 相位信息的离散界面定位
为校正从阶段矩阵运算后得到的深度域信号的亚像素偏差,可以利用CMS 相位信息进行更精确的离散界面定位.(1)式中的干涉光谱信号I(ki,z0)可以表示为

其中,S[g(ki)-kc]为光源功率谱;RR和RS分别是参考臂反射镜和样品的反射率.将(12)式代入(1)式中可得:
(13)式中,谱域相位φ(ki,z0)=2g(ki)z0+h(ki),φ(ki,z0-δ)=2g(ki)(z0-δ)+h(ki),h(ki)为 两干涉臂之间的色散失配.将谱域相位代入(13)式并结合g(ki)'=[g(ki)-kc]'可以得到:

由(15)式可以看出,CMS 深度域信号在峰值点处的深度域相位为

CMS 的深度域信号ICMS(ki,z0)相当于对波数均匀分布的谱域干涉光谱信号进行逆DFT,有如下关系:

其中,Inon-chirp[g(ki),z0] 为波数均匀分布的谱域干涉光谱信号.由(17)式可知,对CMS 的深度域信号进行傅里叶变换可以得到其波数均匀分布的谱域干涉光谱信号,再对该信号进行相位提取,可以得到其谱域相位信息:

从CMS 信号中获取其深度域包裹相位与谱域相位信息后,可以根据(7)式-(10)式求得峰值位置处的亚像素偏差δ,再结合光程差(optical path difference,OPD)表达式 O PD=2z0=2(z0-δ+δ)得到精确的OPD:

由此可以看出,充分利用CMS 信号的深度域相位和谱域相位,可以解决深度域的相位包裹问题并得到更精确的OPD 求解结果.
3 实验结果与讨论
实验系统见图2,在已有超高分辨谱域OCT系统基础上[32],做出了部分改进.超连续光源发出光谱带宽约为200 nm 的可见低相干光,经2 倍扩束器扩束后,平行入射至分光比为1∶1 的分束器上(BS,Thorlabs),透射光部分经30 mm 透镜聚焦到参考臂平面镜上,反射光部分则通过扫描振镜(GVS012,Thorlabs)扫描,经消色差透镜(30 mm,Edmund optics)聚焦到样品上;最终,两束返回光重新汇聚,经扩束、50 µm 小孔滤波后入射至衍射光栅上(600 线/mm,Wasatch Photonics),形成宽光谱色散,最终被像素数2048、行频250 kHz 的线阵互补金属氧化物半导体相机(CMOS,OCTOP LUS,Teledyne E2v)采集,实现了最高250 fps 成像速度(对应于横向1000 个采样点数)的快速成像.系统的横向分辨率约为3.9 µm,轴向分辨率约为1.6 µm,成像量程约为687.82 µm.
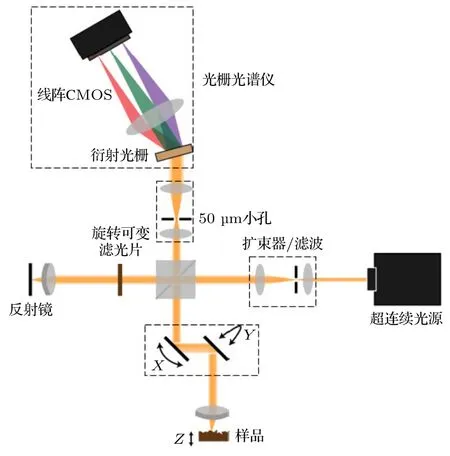
图2 谱域OCT 系统Fig.2.Spectral domain OCT system.
3.1 数值模拟实验
为了验证相位模板对于重建结果的影响,对CMS 算法进行了模拟.设置光源功率谱为高斯型,其波长范围为 500—850 nm,光谱仪采样点数为2048,主阶段用于构建模板的干涉光谱对应的OPD 分别为 100 μm和120 μm.从阶段模拟一个OPD为200 μm 的干涉光谱信号,用于从阶段的Aline 信号重建.使用传统CMS 算法与改进模板的CMS 算法以及重采样去色散(phase calibration with dispersion compensation,PCDC)算法的重建结果如图3 所示.可以看出,PCDC 算法与改进模板的CMS-OCT 算法所获得的峰值点位置均为165,传统CMS 算法获得的峰值点位置为166,根据 Δz==0.6068 μm,其中Δz为深度域采样间隔,N为光谱采样点数,Δk为光谱采样间隔,求得PCDC 算法和改进模板的CMS 算法的OPD: OPDPCDC=OPDICMS=2×165×0.6068 =200.244 µm;采用传统CMS 算法得到的OPD 为OPDCMS=2×166×0.6068=201.4576 μm. 显然,PCDC 算法与改进模板的CMS 算法的重建结果高度一致,且更接近于设定值 200 μm,而传统CMS 算法则出现了像素级别的误差.
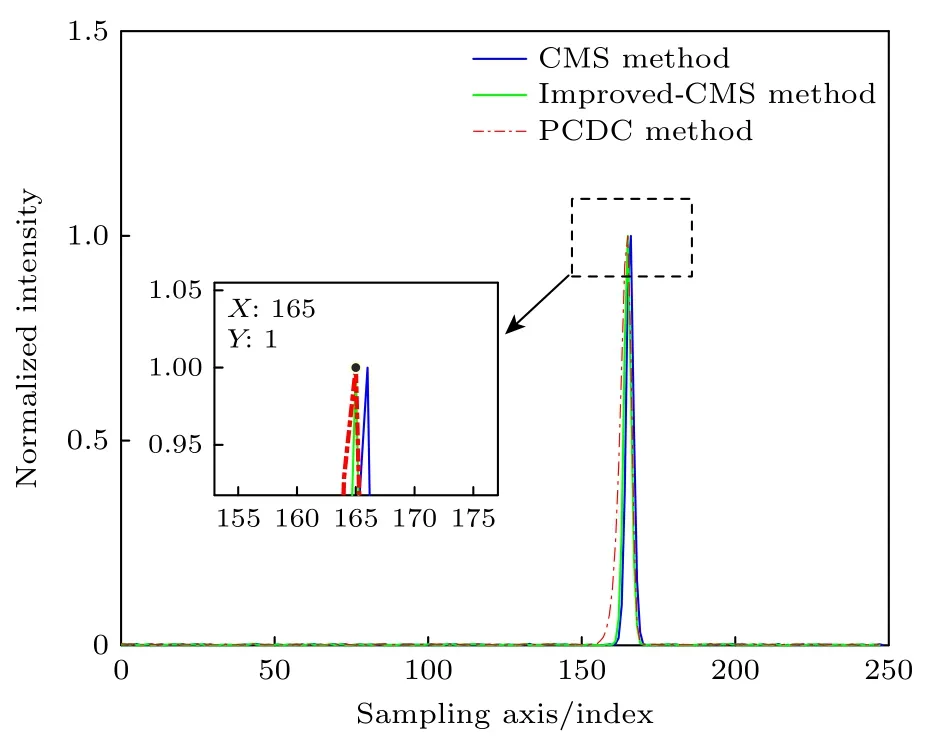
图3 PCDC 算法、传统CMS 算法和改进的CMS 算法的定位结果Fig.3.Positioning results of PCDC algorithm,traditional CMS algorithm and improved CMS algorithm.
3.2 成像速度实验
为验证CMS 算法在成像速度上的优势,在主阶段使用两块厚度分别为1001 µm 和1009 µm 的不透明金属量规进行模板构建,分别测量模板大小从100-2048 的成像速度,并与FFT算法的运算速度进行比较,结果如图4 所示.可以看出,当目标成像区域为整个成像范围的一小部分时,采用CMS 算法具有显著优势,且PCDC 算法在FFT之前需要进行重采样、去色散等一系列操作,成像速度进一步降低.
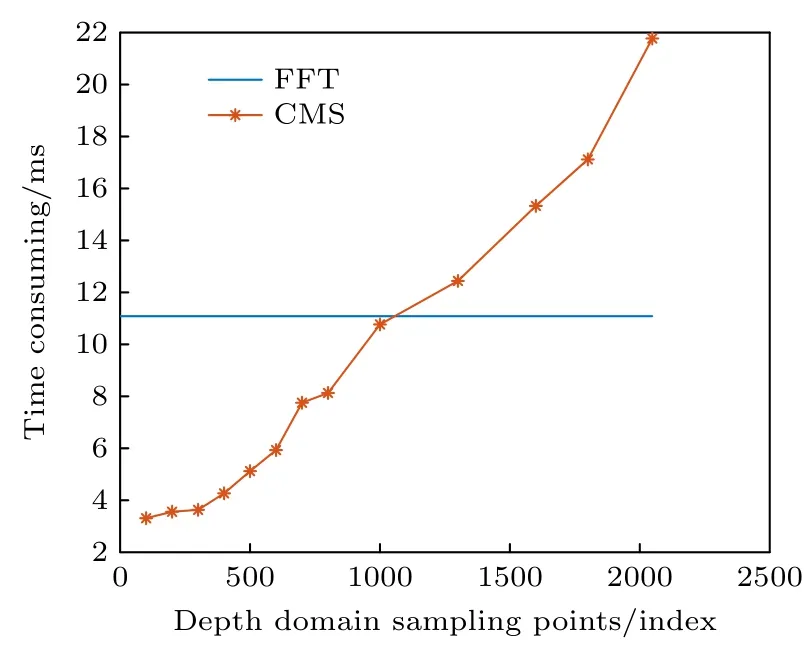
图4 CMS 算法和FFT 算法运算时间的比较Fig.4.Comparison of the operation time between CMS algorithm and FFT algorithm.
3.3 不同CMS 模板重建结果对比
为了实际说明提出的相位模板构建方法相较于传统CMS 模板在单一界面定位上的优势,在主阶段使用厚度分别为1001 µm 和1009 µm 的金属量规构建传统模板与消除亚像素偏差后的模板,在从阶段对厚度分别为 1250 µm 和1350 µm的金属量规分别进行单一界面定位,其结果见图5.PCDC 算法和改进的CMS 算法模板重建得到的两量规峰值像素采样间隔为nPCDC=nICMS=27-(-122)=149,根据Δz==0.6717 μm,可求得实际光程差 OPDPCDC=OPDICMS=2×149×Δz=200.1666 μm,传 统CMS 算法得到的两量规的峰值像素采样间隔为nCMS=27-(-123)=150,其对应的光程差为 O PDCMS=2×150×Δz=201.51 μm,实验中两组量规的厚度差为100 µm,其对应的OPD 为200 µm.显然,改进的CMS 模板较之传统CMS 模板在界面定位方面具有明显优势.
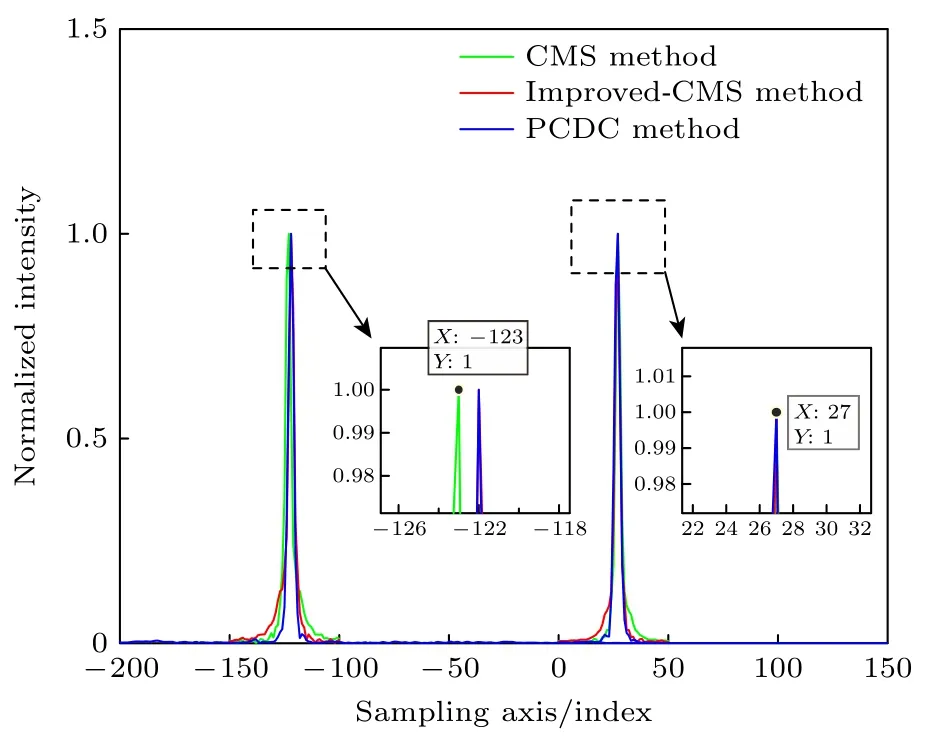
图5 PCDC 算法、传统CMS 算法和改进的CMS 算法对厚度分别为1250 µm 和1350 µm 的金属量规的定位结果Fig.5.Positioning results of metal gauges with a thickness of 1250 µm and 1350 µm obtained from the PCDC algorithm,the traditional CMS algorithm and the improved CMS algorithm.
3.4 量规重复性实验
为了实际说明所提出方法相较于传统CMS 算法在单一界面定位上的重复性优势,将两块厚度分别为1250 µm和1350 µm 的金属量规作为样品,分别使用PCDC 算法、传统CMS 算法(未改进模板但利用了2.3 节所介绍的CMS 相位)和本文改进的CMS 算法进行量规OPD 的500 次重复测量,结果如图6(a)所示.PCDC 算法得到的OPD 平均值为 200.0653 µm,传统CMS 算法得到的OPD平均值为200.3724 µm,改进的CMS 算法得到的OPD 平均值为200.0749 µm.图6(b)-(d)分别给出了用PCDC 算法、传统CMS 算法和改进的CMS算法求取OPD 的分布情况.用传统CMS 算法求取的OPD 的标准差为 74.8 pm,而用PCDC算法和改进的CMS 算法求取的OPD 的标准差分别为21.3 pm和37.3 pm.可见改进的CMS 算法具有更好的重复性,且其测量平均值与PCDC 算法具有高度一致性.
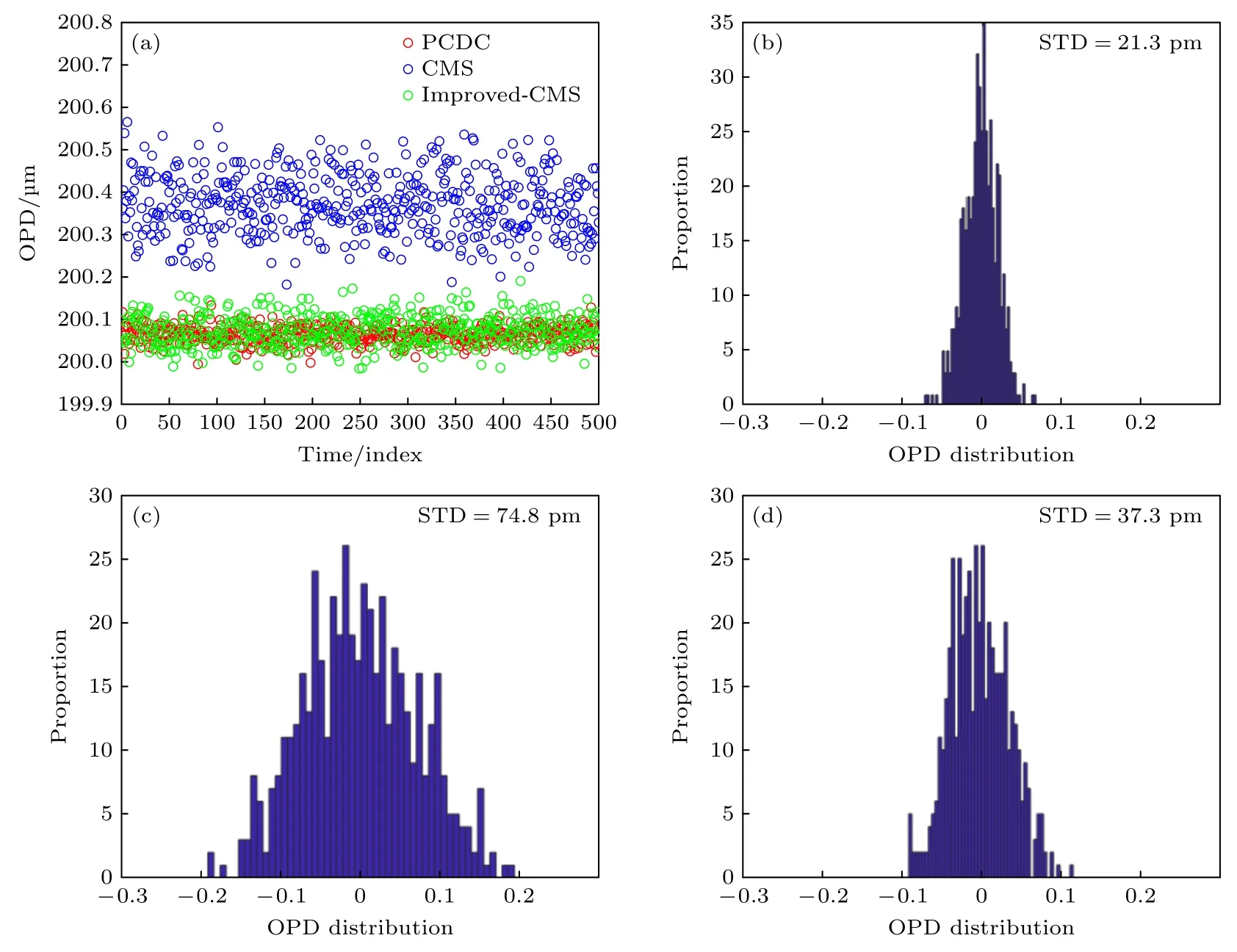
图6 (a)用PCDC 算法(红色)、传统CMS 算法(蓝色)以及改进的CMS 算法(绿色)求取的OPD;(b)用PCDC 算法求取的OPD 分布情况;(c)用传统CMS 算法求取的OPD 分布情况;(d)用改进的CMS 算法求取的OPD 分布情况Fig.6.(a)OPD obtained by PCDC algorithm(red),traditional CMS algorithm(blue)and improved CMS algorithm(green);(b)OPD distribution obtained by PCDC algorithm;(c)OPD distribution obtained by traditional CMS algorithm;(d)OPD distribution obtained by improved CMS algorithm.
3.5 光学透镜离散界面实验
为了验证本文所提出的方法在光学透镜离散界面定位上的优势,并考虑到实验系统的量程限制,以盖玻片的下表面与平凸透镜的上表面作为样品进行探测,样品示意图如图7 所示.分别使用PCDC 算法、传统CMS 算法(未改进模板但利用了2.3 节所介绍的CMS 相位)及本文改进的CMS算法处理了三维图像数据,针对盖玻片下表面以及平凸透镜上表面的界面定位结果如图8 所示.图8(b)-(d)分别表示了PCDC 算法、传统CMS算法及改进的CMS 算法的三维重建结果,由于其OPD 动态范围较大难以注意到OPD 三维图像之间的差异.图8(b)-(d)为对应图8(b)-(d)中黑线处的轴向剖面图,从其中虚线框的放大图中可以看出本文所提出的方法与PCDC 算法具有高度一致性,而传统CMS 算法具有相对较大误差.为进一步说明重建结果之间的差异,以PCDC 算法的重建结果作为基准,分别计算传统CMS 算法和改进的CMS 算法的重建结果与基准间的标准差,计算公式为
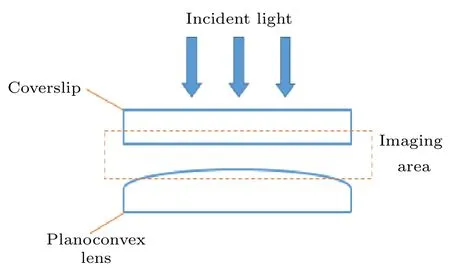
图7 样品成像范围示意图Fig.7.Schematic diagram of sample imaging range.
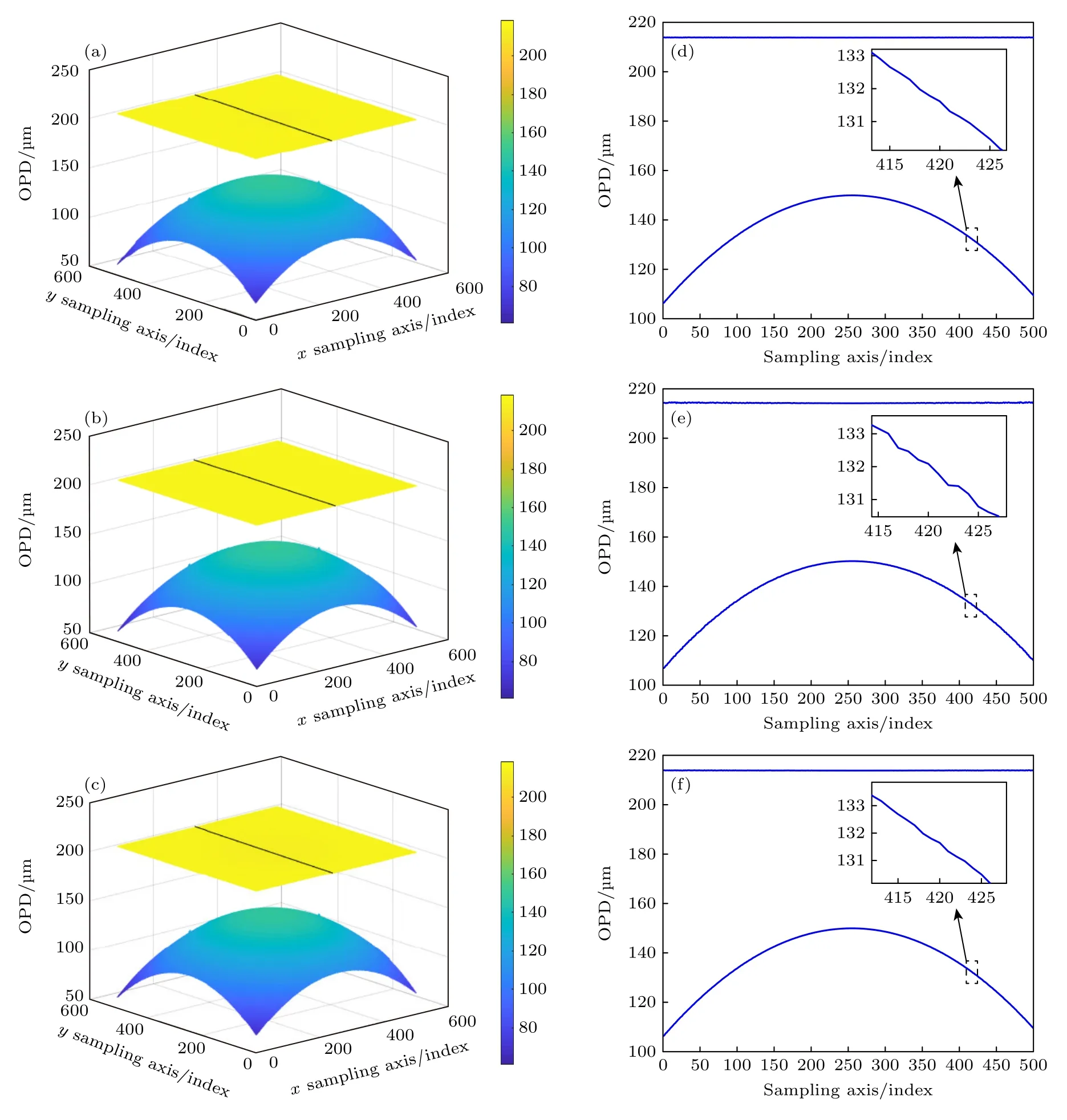
图8 光学透镜离散界面定位结果(a)PCDC 算法的定位结果;(b)传统CMS 算法的定位结果;(c)改进的CMS 算法的定位结果;(d)-(f)分别对应图(a)-(c)中黑线位置处的轴向剖面图Fig.8.Positioning results of optical lens discrete interface:(a)Positioning results of PCDC algorithm;(b)positioning results of traditional CMS algorithm;(c)positioning results of improved CMS algorithm;(d)-(f)axial section at the black line in panel(a)-(c),respectively.

其中 O PDe为传统CMS 算法和改进的CMS算法计算得到的OPD 数值,O PDb为PCDC算法计算得到的OPD 数值.计算得到传统CMS算法重建结果与基准之间的标准差为340.1343,而改进的CMS算法重建结果与基准之间的标准差为16.6985,说明本文所提出的测量方法实现了高动态范围OPD的定量测量,可以良好地刻画光学透镜离散界面信息.
4 结论
本文提出了一种基于CMS-OCT 相位信息的离散界面快速定位方法,该方法保持了CMS 算法在局域成像上的速度优势,并结合谱域相位信息、深度域相位信息,精确地校正了信号在峰值点处的亚像素偏差,从而构建更精确的复数相位模板,并充分利用CMS 相位信息进行界面定位,获得更好的定位效果.通过理论推导和模拟,说明了传统CMS 算法模板构建的问题,针对问题提出了模板构建的新方法,并给出了利用CMS 相位进行界面定位的方法.使用不同大小的模板进行了成像速度实验,验证了CMS 算法在成像速度上的优势;通过对比不同模板的重建结果,验证了构建模板新方法的优势;通过对精密光学量规厚度差的重复性测量,验证了所提出方法相较于传统方法在定位精度和重复性上的提高;最后对光学透镜离散界面进行了精确的定量测量,验证了所提出方法在光学透镜离散界面精确定位方面的优势.